
ในบทเรียนก่อนหน้านี้คุณประมาณพิกัดของตำแหน่งต่างๆบน CTE Tile ตอนนี้คุณจะรวบรวมพิกัดเฉพาะ (x, y, z) ใน VEXcode EXP
ในบทเรียนนี้ท่านจะได้เรียนรู้วิธีใช้จี้คำสอนเพื่อ:
- เปิดใช้งานการเคลื่อนไหวด้วยตนเอง
- รวบรวมพิกัด (x, y, z)
ในตอนท้ายของบทเรียนนี้คุณจะใช้ทักษะเหล่านั้นในกิจกรรม เพื่อย้ายแขน 6 แกนของคุณด้วยตนเองเพื่อค้นหาพิกัด (x, y, z) ของตำแหน่งไทล์สามตำแหน่ง
การใช้จี้คำสอนเพื่อรวบรวมพิกัด
Teach Pendant ภายใน VEXcode EXP เป็นอินเทอร์เฟซที่ใช้เพื่อควบคุมการเคลื่อนไหวของแขน 6 แกนโดยไม่จำเป็นต้องเขียนโค้ด อุปกรณ์นี้มีความจำเป็นสำหรับทั้งการรวบรวมข้อมูลที่จำเป็นในการเขียนรหัสแขน 6 แกนอย่างถูกต้องเช่นเดียวกับการทำความเข้าใจการเคลื่อนไหวของมัน
เปิดใช้งานการเคลื่อนไหวด้วยตนเอง
การเคลื่อนไหวด้วยตนเองคือเมื่อคุณขยับแขน 6 แกนด้วยมือ
สำคัญ: แขน 6 แกน ควรเคลื่อนด้วยมือหลังจากเปิดใช้งานการเคลื่อนไหวด้วยตนเองใน Teach Pendant ภายใน VEXcode EXP เท่านั้น การพยายามเคลื่อนแขน 6 แกนด้วยมือโดยไม่เปิดใช้งานการเคลื่อนไหวด้วยตนเองอาจทำให้แขน 6 แกนเสียหายได้
ทำตามขั้นตอนด้านล่างเพื่อเปิดจี้คำสอนและเปิดใช้งานการเคลื่อนไหวด้วยตนเองสำหรับแขน 6 แกนของคุณ
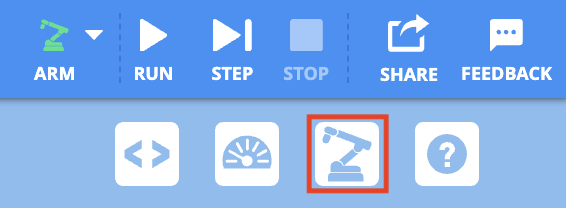
เลือกไอคอนสอนจี้เพื่อเปิดตรวจสอบ ให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว
หมายเหตุ: คุณจะได้รับแจ้งให้เชื่อมต่อแขน 6 แกนเพื่อใช้จี้คำสอนหากแขน 6 แกนไม่ได้เชื่อมต่ออยู่แล้ว
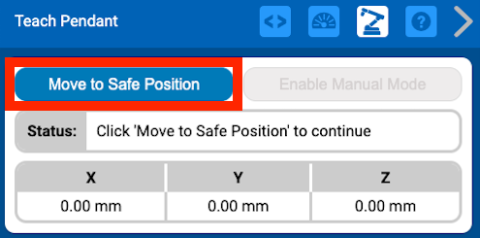
เลือก ย้ายไปยังตำแหน่ง ที่ปลอดภัยเพื่อเริ่มใช้จี้คำสอน
สิ่งนี้ย้ายแขน 6 แกนไปยังตำแหน่ง 'ปลอดภัย' ที่สม่ำเสมอที่ประมาณ (120, 0, 100) เมื่อเลือกแล้วคุณสมบัติ Teach Pendant จะเปิดใช้งาน
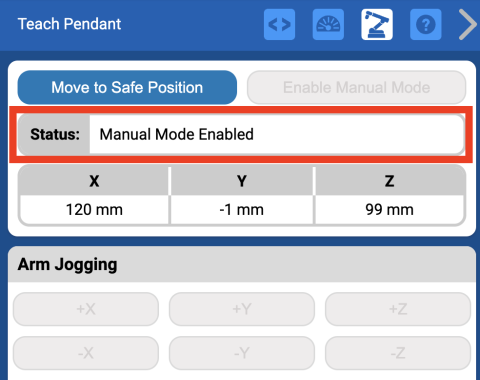
เปิดใช้งานการเคลื่อนไหวด้วยตนเองโดยเลือก เปิดใช้งานโหมดด้วยตนเอง
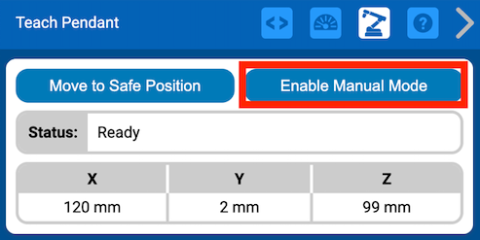
ในโหมดแมนนวลแถบสถานะของ Teach Pendant จะแสดง 'เปิดใช้งานโหมดแมนนวล' และคุณสมบัติการวิ่งจ๊อกกิ้งจะถูกปิดใช้งาน
รวบรวมพิกัด (x, y, z)
เมื่อเปิดใช้งานการเคลื่อนไหวด้วยมือแล้วพิกัด (x, y, z) สามารถรวบรวมได้โดยการเคลื่อนแขน 6 แกนไปยังตำแหน่งที่ต้องการ ปฏิบัติตามขั้นตอนด้านล่างเพื่อรวบรวมพิกัดของตำแหน่งกระเบื้อง 34 Follow along with the steps below to gather the coordinate of Tile location 34.
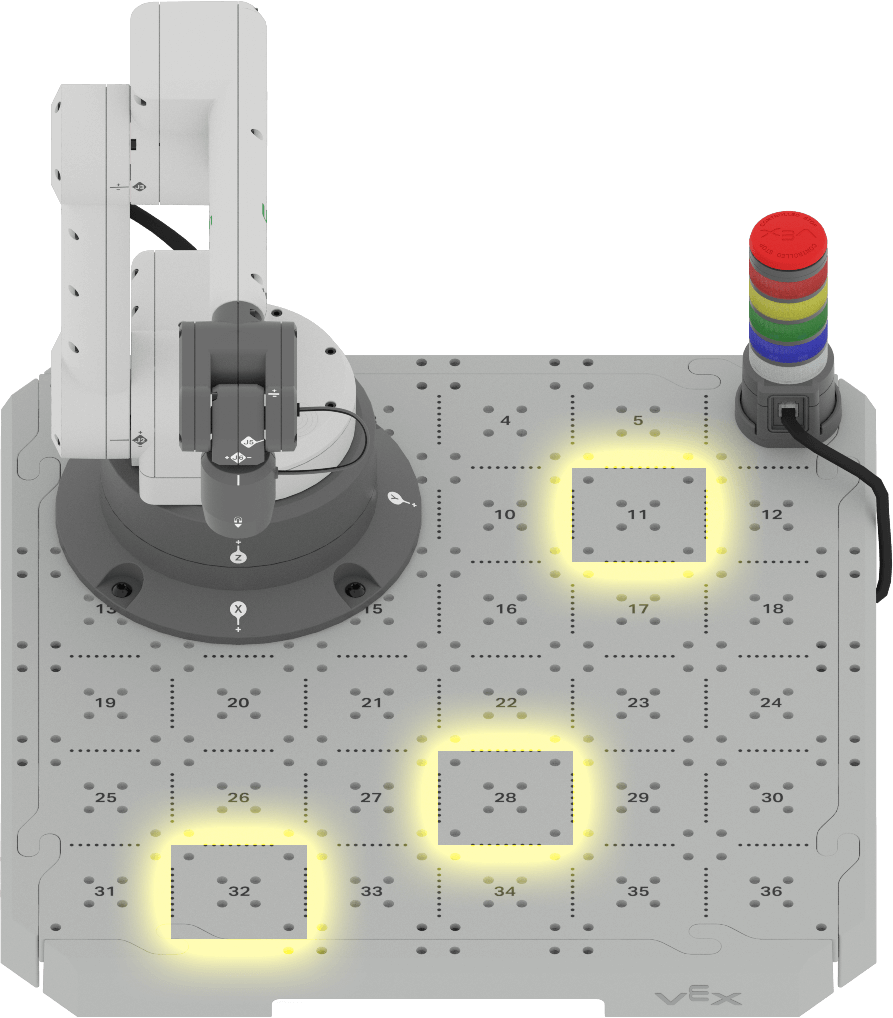
ขยับปลายแขน 6 แกนทางกายภาพเพื่อให้เครื่องมือรับแม่เหล็กสัมผัสกับตำแหน่งกระเบื้อง 34
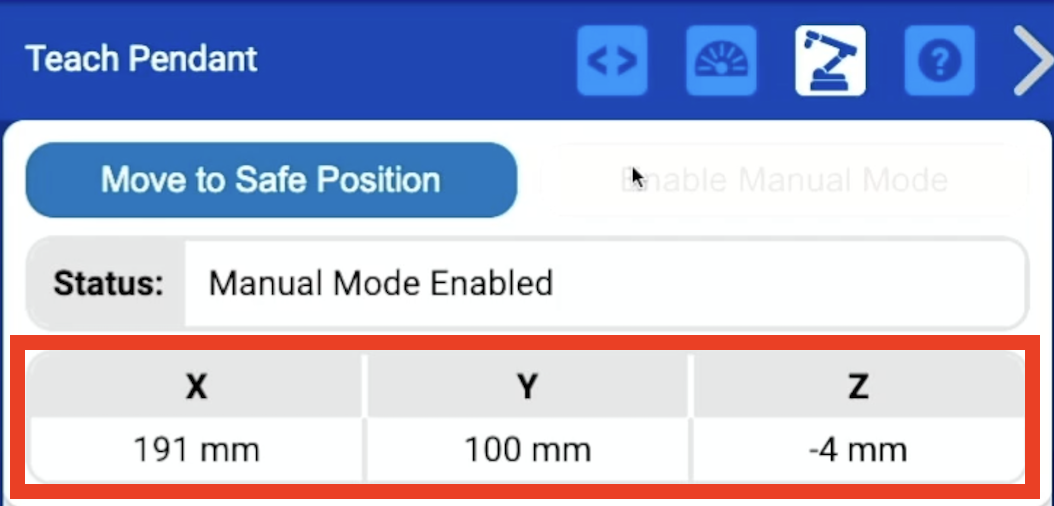
พิกัด (x, y, z) จะแสดงบนแดชบอร์ดสอนจี้ การอัปเดตเหล่านี้แบบเรียลไทม์เมื่อแขน 6 แกนเคลื่อนที่ (ดังที่แสดงในวิดีโอด้านบน)
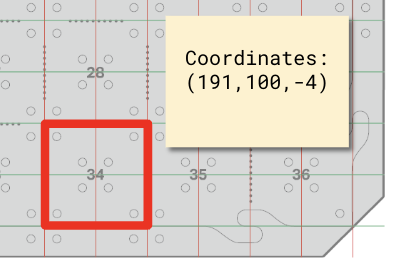
บันทึกพิกัด (x, y, z) ของตำแหน่งไทล์ 34 ในสมุดบันทึกวิศวกรรมของคุณ
กิจกรรม
ตอนนี้คุณได้เรียนรู้วิธีการเคลื่อนย้ายแขน 6 แกนด้วยตนเองแล้วคุณจะได้ฝึกบันทึกพิกัดของตำแหน่งไทล์หลายตำแหน่ง คุณจะรวบรวมและบันทึกพิกัดของตำแหน่งไทล์เดียวกันกับที่คุณคาดการณ์ไว้ในบทเรียนก่อนหน้านี้ ตรวจสอบให้แน่ใจว่าคุณมีราคาโดยประมาณเหล่านั้นพร้อมใช้งานเมื่อทำกิจกรรมนี้เสร็จ
- เคลื่อนแขน 6 แกนด้วยตนเองและบันทึกพิกัด (x, y, z)
ของตำแหน่งไทล์ต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ:
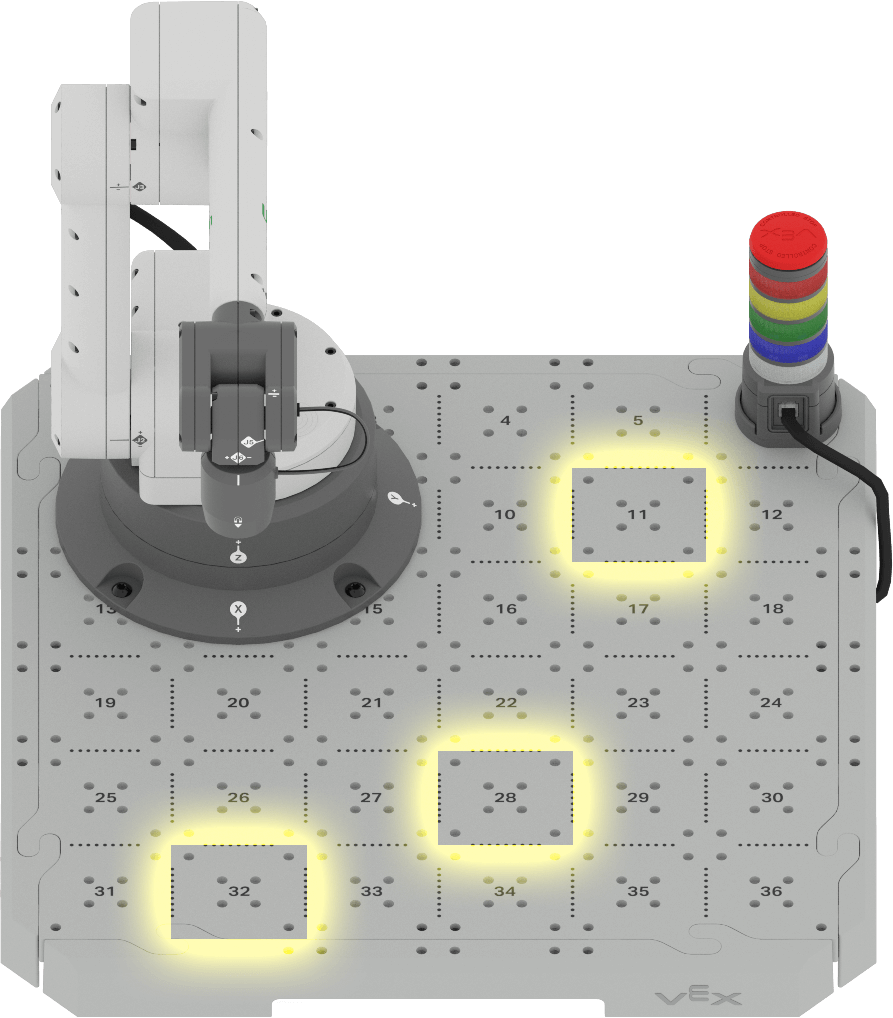
- ตำแหน่งกระเบื้อง 11
- ตำแหน่งกระเบื้อง 32
- ตำแหน่งกระเบื้อง 28
- เปรียบเทียบ พิกัดที่รวบรวมไว้ กับค่าประมาณของตำแหน่ง Tile เดียวกันในบทเรียนก่อนหน้าในสมุดบันทึกวิศวกรรมของคุณ ราคาโดยประมาณของคุณอยู่ใกล้แค่ไหน?
ตรวจสอบความเข้าใจของคุณ
ก่อนเริ่มบทเรียนต่อไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > (Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อรวมทักษะของคุณในกิจกรรม การนำทุกสิ่งมารวมกัน