
पाठ 4: रोबोटिक भुजा की मैन्युअल गतिविधियों को समझना
पिछले पाठ में आपने CTE टाइल पर विभिन्न स्थानों के निर्देशांक का अनुमान लगाया था। अब आप VEXcode EXP में विशिष्ट (x, y, z) निर्देशांक एकत्रित करेंगे।
इस पाठ में, आप सीखेंगे कि टीच पेंडेंट का उपयोग कैसे करें:
- मैन्युअल मूवमेंट सक्षम करें.
- (x, y, z) निर्देशांक एकत्रित करें।
इस पाठ के अंत में, आप गतिविधि में उन कौशलों का उपयोग करके अपने 6-अक्ष भुजा को मैन्युअल रूप से स्थानांतरित करके तीन टाइल स्थानों के (x, y, z) निर्देशांक ज्ञात करेंगे।
निर्देशांक एकत्रित करने के लिए टीच पेंडेंट का उपयोग करना
VEXcode EXP के अंतर्गत टीच पेंडेंट एक इंटरफ़ेस है जिसका उपयोग कोडिंग की आवश्यकता के बिना 6-एक्सिस आर्म की गति को नियंत्रित करने के लिए किया जाता है। यह उपकरण 6-अक्ष भुजा को सटीक रूप से कोड करने के लिए आवश्यक जानकारी एकत्र करने तथा इसकी गतिविधियों को समझने के लिए आवश्यक है।
मैन्युअल मूवमेंट सक्षम करें
मैनुअल मूवमेंट वह है जब आप 6-एक्सिस आर्म को हाथ से भौतिक रूप से चलाते हैं।
महत्वपूर्ण: 6-एक्सिस आर्म को केवल हाथ से ही हिलाया जाना चाहिए, जब VEXcode EXP के भीतर टीच पेंडेंट में मैन्युअल मूवमेंट सक्षम किया गया हो। मैन्युअल मूवमेंट सक्षम किए बिना 6-एक्सिस आर्म को हाथ से हिलाने का प्रयास करने से 6-एक्सिस आर्म को नुकसान हो सकता है।
टीच पेंडेंट को खोलने और अपने 6-एक्सिस आर्म के लिए मैन्युअल मूवमेंट सक्षम करने के लिए नीचे दिए गए चरणों का पालन करें।
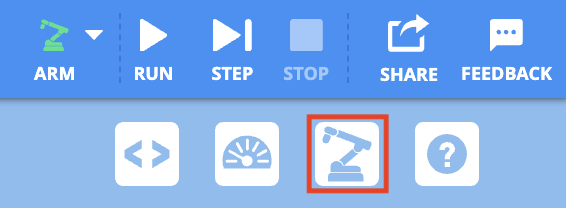
इसे खोलने के लिए टीच पेंडेंट आइकन का चयन करें। सुनिश्चित करें कि 6-अक्ष आर्म VEXcode से जुड़ा हुआ है।
नोट:यदि 6-अक्षीय आर्म पहले से कनेक्ट नहीं है, तो टीच पेंडेंट का उपयोग करने के लिए आपको 6-अक्षीय आर्म को कनेक्ट करने के लिए कहा जाएगा।
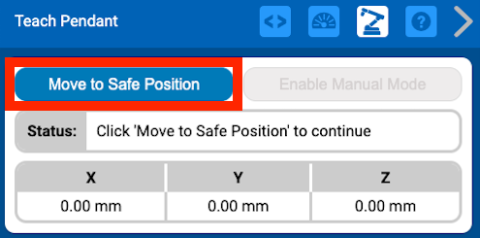
टीच पेंडेंट का उपयोग शुरू करने के लिएसुरक्षित स्थितिपर जाएँ का चयन करें।
यह 6-अक्ष भुजा को लगभग (120, 0, 100) पर एक सुसंगत 'सुरक्षित' स्थिति में ले जाता है। एक बार चयन करने पर, टीच पेंडेंट सुविधाएं सक्षम हो जाएंगी।
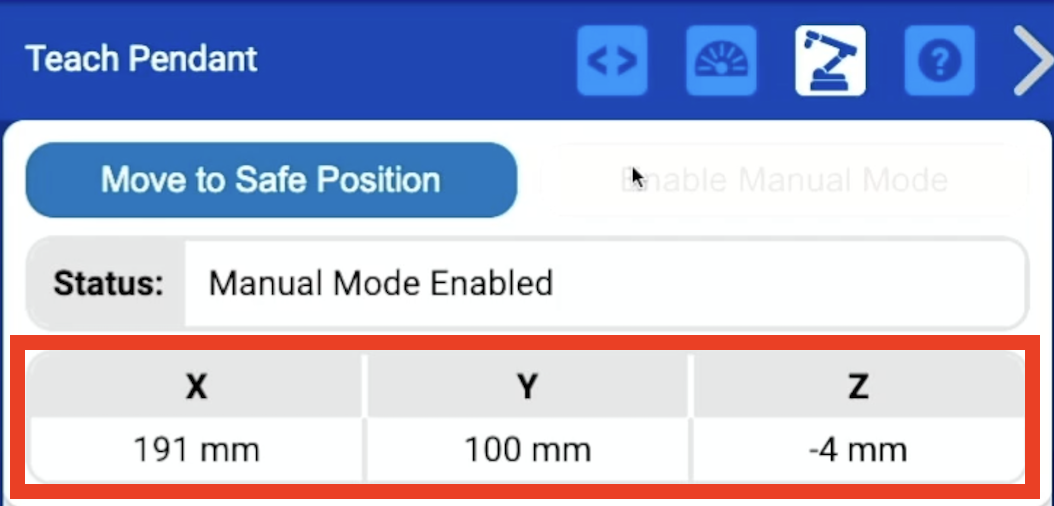
मैनुअल मोड सक्षम करेंका चयन करके मैनुअल मूवमेंट सक्षम करें।

मैनुअल मोड में, टीच पेंडेंट की स्टेटस बार 'मैनुअल मोड सक्षम' दिखाएगी, और जॉगिंग सुविधा अक्षम हो जाएगी।

(x, y, z) निर्देशांक एकत्रित करें
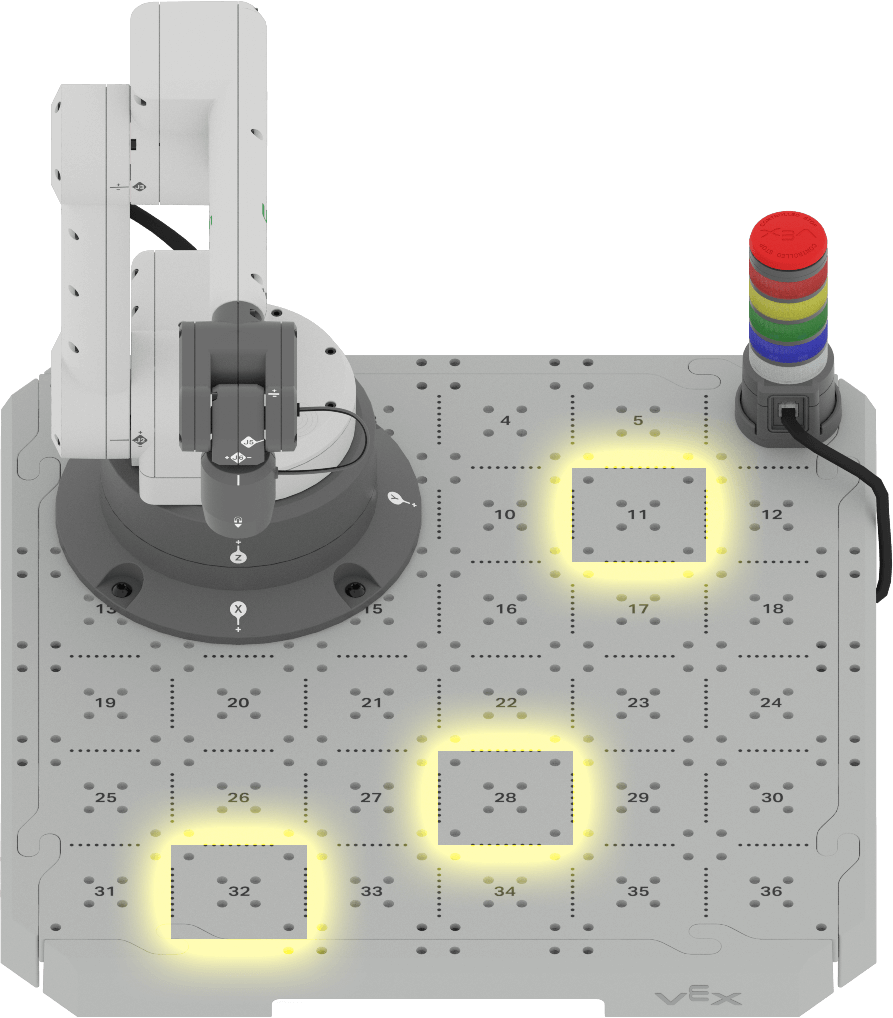
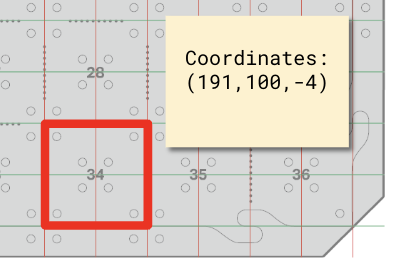
एक बार मैनुअल मूवमेंट सक्षम हो जाने पर, 6-एक्सिस आर्म को वांछित स्थान पर भौतिक रूप से ले जाकर (x, y, z) निर्देशांक एकत्र किए जा सकते हैं। टाइल स्थान 34 का निर्देशांक प्राप्त करने के लिए नीचे दिए गए चरणों का पालन करें।
6-अक्ष भुजा के अंत को भौतिक रूप से इस प्रकार हिलाएं कि मैग्नेट पिकअप टूल टाइल स्थान 34 को स्पर्श करे, जैसा कि इस वीडियो में दिखाया गया है।
(x, y, z) निर्देशांक टीच पेंडेंट डैशबोर्ड पर दिखाए जाते हैं। ये 6-अक्ष भुजा के हिलने पर वास्तविक समय में अद्यतन होते हैं (जैसा कि ऊपर वीडियो में दिखाया गया है)।
टाइल स्थान 34 के (x, y, z) निर्देशांकों को अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
गतिविधि
अब जब आपने 6-अक्ष भुजा को मैन्युअल रूप से स्थानांतरित करना सीख लिया है, तो आप कई टाइल स्थानों के निर्देशांक रिकॉर्ड करने का अभ्यास करेंगे। आप उन्हीं टाइल स्थानों के निर्देशांक एकत्रित और रिकॉर्ड करेंगे जिनका अनुमान आपने पिछले पाठ में लगाया था। इस गतिविधि को पूरा करते समय सुनिश्चित करें कि आपके पास ये अनुमान उपलब्ध हों।
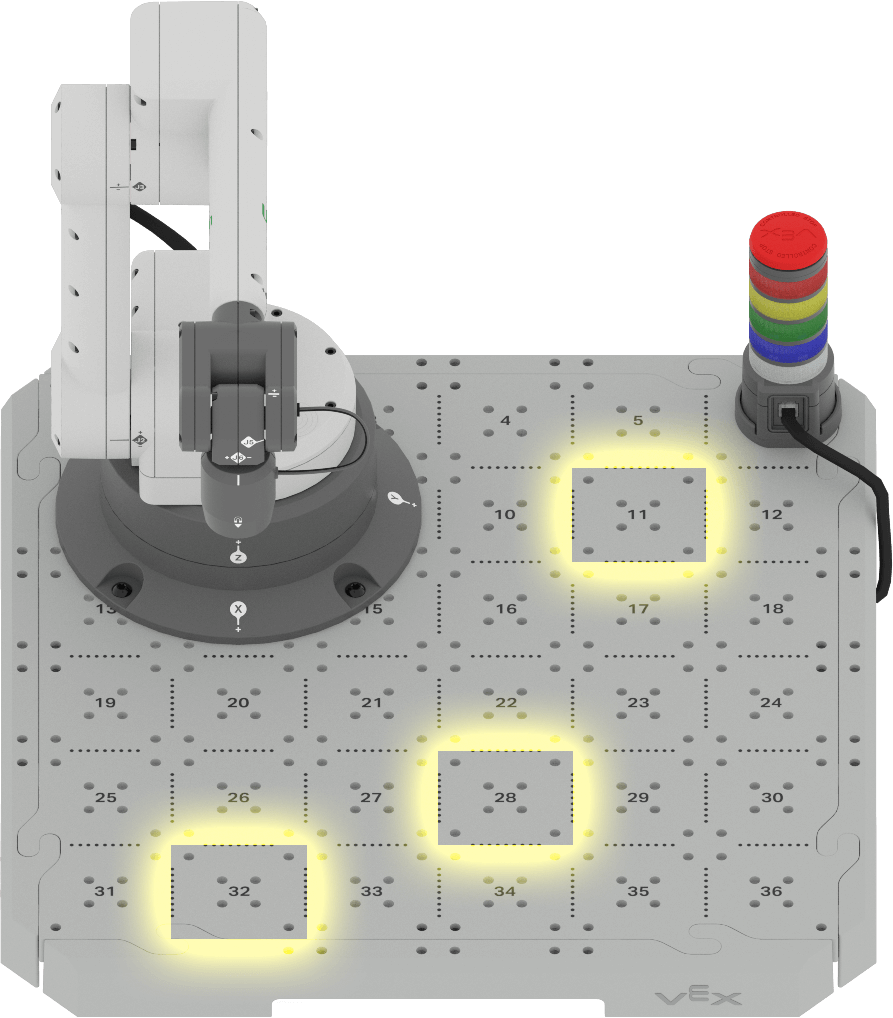
- 6-अक्ष भुजा को मैन्युअल रूप से घुमाएँ और अपनी इंजीनियरिंग नोटबुक में निम्नलिखित टाइल स्थानों के (x, y, z) निर्देशांक रिकॉर्ड करें:
- टाइल स्थान 11
- टाइल स्थान 32
- टाइल स्थान 28
- अपने एकत्रित निर्देशांकों की तुलना अपनी इंजीनियरिंग नोटबुक में पिछले पाठ में दिए गए समान टाइल स्थानों के अपने अनुमानों से करें। आपके अनुमान कितने करीब थे?
अपनी समझ की जाँच करें
अगला पाठ शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
पुटिंग इट ऑल टुगेदर गतिविधि में अपने कौशल को संयोजित करने के लिए अगला > चयन करें।