
Dans la leçon précédente, vous avez estimé les coordonnées de différents emplacements sur la tuile CTE. Maintenant, vous allez rassembler des coordonnées spécifiques (x, y, z) dans VEXcode EXP.
Dans cette leçon, vous apprendrez à utiliser le Pendentif Enseignement pour :
- Activer le mouvement manuel.
- Recueillir les coordonnées (x, y, z).
À la fin de cette leçon, vous utiliserez ces compétences dans l'activité pour déplacer manuellement votre bras à 6 axes pour trouver les coordonnées (x, y, z) de trois emplacements de tuiles.
Utilisation du pendentif Teach pour recueillir les coordonnées
Le Teach Pendant dans VEXcode EXP est une interface utilisée pour contrôler le mouvement du bras à 6 axes sans avoir besoin de codage. Cet appareil est essentiel à la fois pour collecter les informations nécessaires au codage précis du bras à 6 axes et pour comprendre ses mouvements.
Activer le mouvement manuel
Le mouvement manuel est lorsque vous déplacez physiquement le bras à 6 axes à la main.
Important : le bras à 6 axes ne doit être déplacé à la main qu'une fois que le mouvement manuel a été activé dans le pendentif Teach dans VEXcode EXP. Tenter de déplacer le bras à 6 axes à la main sans activer le mouvement manuel peut endommager le bras à 6 axes.
Suivez les étapes ci-dessous pour ouvrir la suspension Teach et activer le mouvement manuel de votre bras à 6 axes.
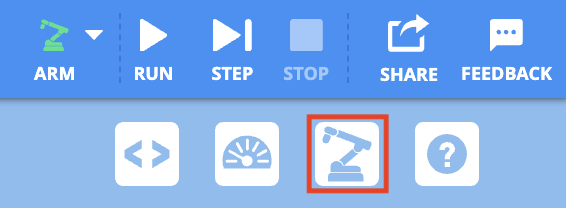
Sélectionnez l'icône Enseigner le pendentif pour l'ouvrir. Assurez-vous que le bras à 6 axes est connecté à VEXcode.
Remarque : vous serez invité à connecter le bras à 6 axes afin d'utiliser le pendentif d'enseignement, si le bras à 6 axes n'est pas déjà connecté.
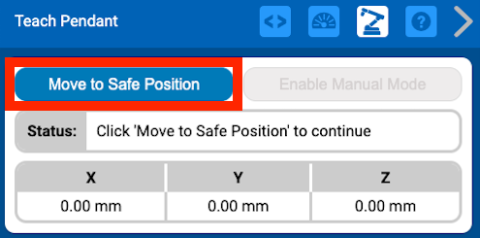
Sélectionnez Déplacer en position de sécurité pour commencer à utiliser le pendentif d'enseignement.
Cela déplace le bras à 6 axes vers une position « sûre » cohérente, à environ (120, 0, 100). Une fois sélectionnées, les fonctionnalités Teach Pendant seront activées.
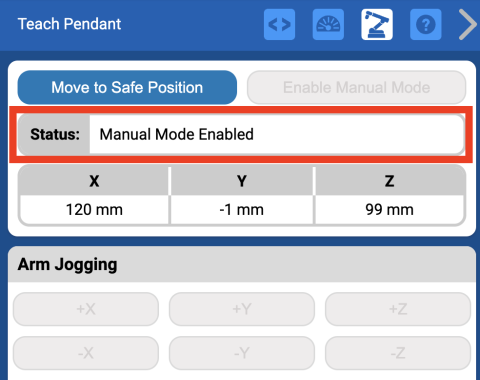
Activez le mouvement manuel en sélectionnant Activer le mode manuel.
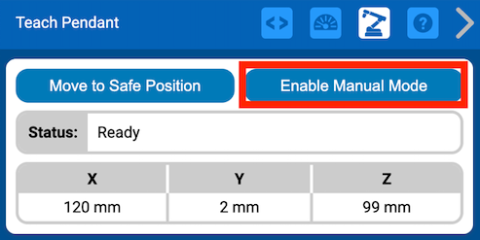
En mode manuel, la barre d'état de la suspension Teach affichera « Mode manuel activé » et la fonction de jogging sera désactivée.
Recueillir (x, y, z) Coordonnées
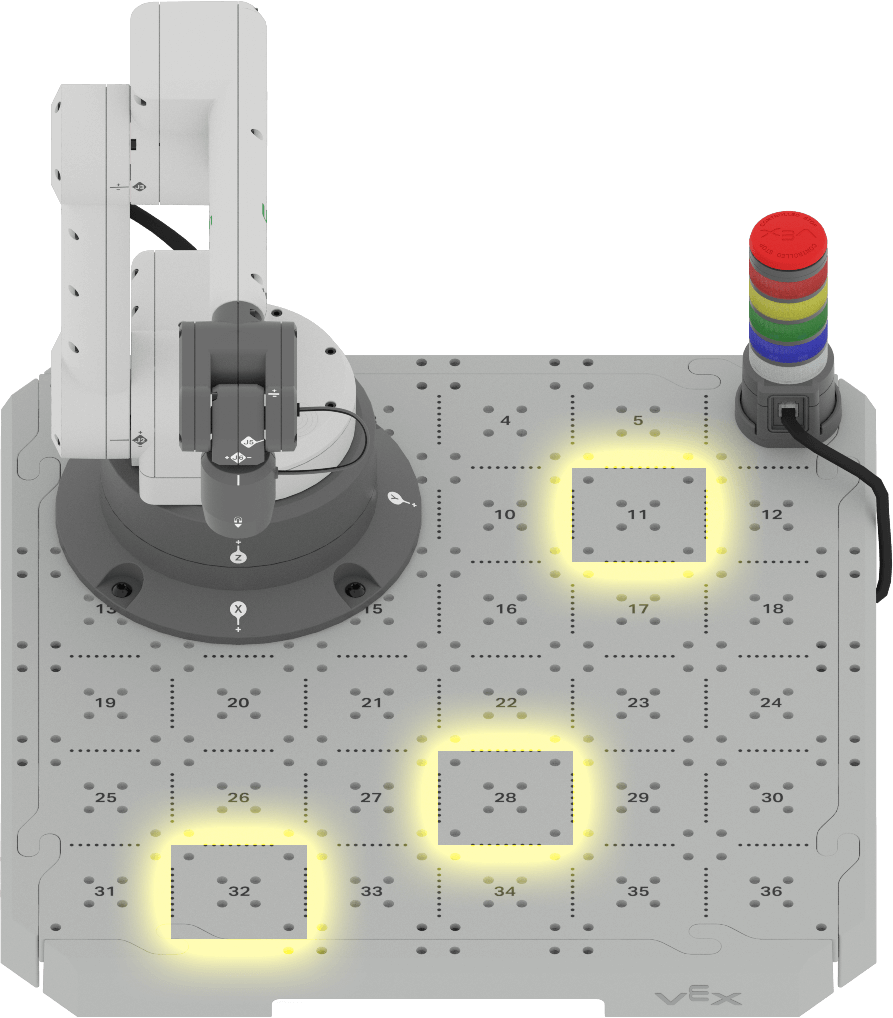
Une fois le mouvement manuel activé, les coordonnées (x, y, z) peuvent être recueillies en déplaçant physiquement le bras à 6 axes à l'emplacement souhaité. Suivez les étapes ci-dessous pour rassembler les coordonnées de l'emplacement de la tuile 34.
Déplacez physiquement l'extrémité du bras à 6 axes de sorte que l'outil de ramassage d'aimant touche l'emplacement de la tuile 34.
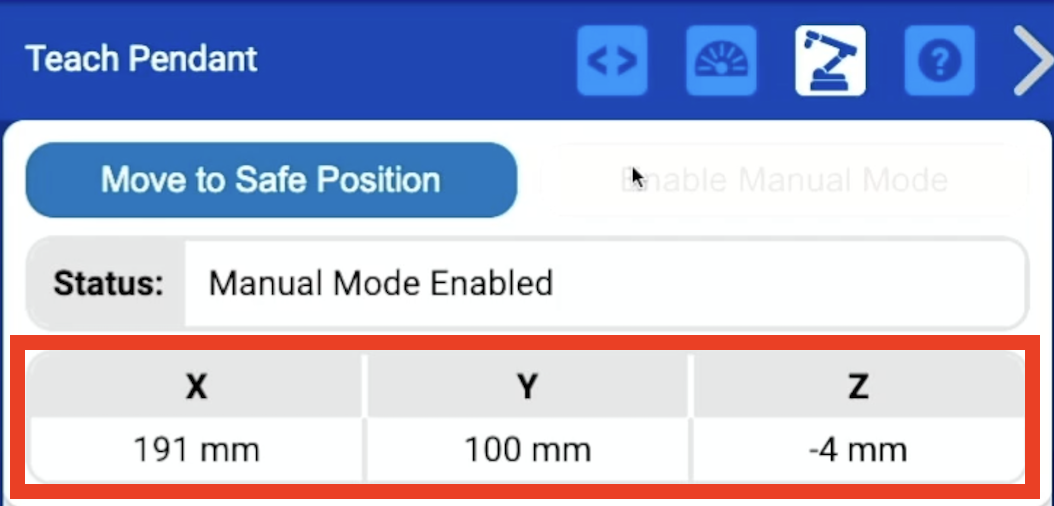
Les coordonnées (x, y, z) sont affichées sur le tableau de bord Teach Pendant. Ceux-ci se mettent à jour en temps réel lorsque le bras à 6 axes se déplace (comme le montre la vidéo ci-dessus).
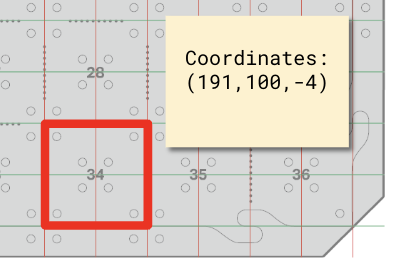
Enregistrez les coordonnées (x, y, z) de l'emplacement 34 de la tuile dans votre cahier d'ingénierie.
Activité
Maintenant que vous avez appris à déplacer manuellement le bras à 6 axes, vous allez vous entraîner à enregistrer les coordonnées de plusieurs emplacements de tuiles. Vous recueillerez et enregistrerez les coordonnées des mêmes emplacements de tuiles que vous avez estimés dans la leçon précédente. Assurez-vous de disposer de ces estimations lorsque vous terminez cette activité.
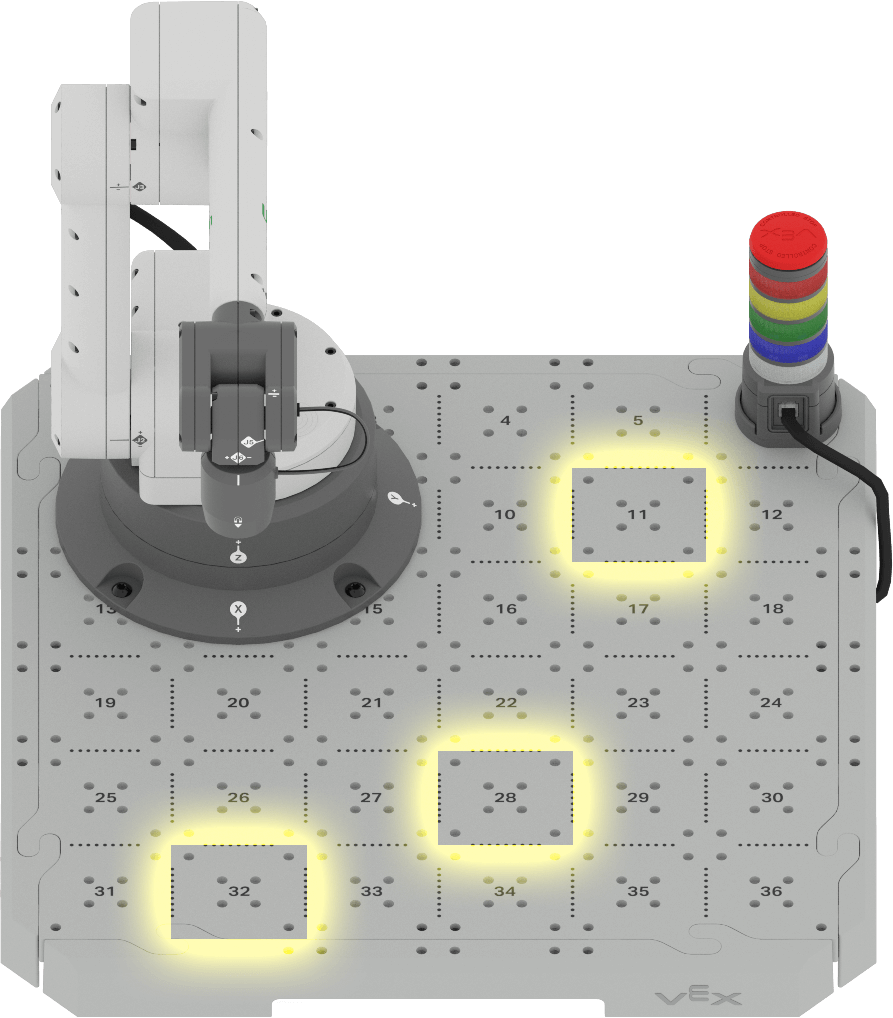
- Déplacez manuellement le bras à 6 axes et enregistrez les coordonnées (x, y, z) des emplacements de tuiles suivants dans votre bloc-notes d'ingénierie :
- Emplacement de la tuile 11
- Emplacement de la tuile 32
- Emplacement de la tuile 28
- Comparez vos coordonnées recueillies à vos estimations des mêmes emplacements de tuiles dans la leçon précédente dans votre cahier d'ingénierie. À quel point vos estimations étaient-elles proches ?
Vérifiez votre compréhension
Avant de commencer la prochaine leçon, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour combiner vos compétences dans l'activité Tout mettre ensemble.