
4과: 로봇 팔의 수동 동작 이해
이전 수업에서는 CTE 타일의 다양한 위치 좌표를 추정했습니다. 이제 VEXcode EXP에서 구체적인 (x, y, z) 좌표를 수집하게 됩니다.
이 수업에서는 Teach Pendant를 사용하여 다음 작업을 수행하는 방법을 알아봅니다.
- 수동 이동을 활성화합니다.
- (x, y, z) 좌표를 수집합니다.
이 수업을 마치면 활동에서 배운 기술을 사용하여 6축 팔을 수동으로 움직여 세 개의 타일 위치의 (x, y, z) 좌표를 찾습니다.
티치 펜던트를 사용하여 좌표 수집
VEXcode EXP 내의 티치 펜던트는 코딩이 필요 없이 6축 암의 움직임을 제어하는 데 사용되는 인터페이스입니다. 이 장치는 6축 암을 정확하게 코딩하는 데 필요한 정보를 수집하는 것과 암의 움직임을 이해하는 데 모두 필수적입니다.
수동 이동 활성화
수동 동작은 6축 팔을 손으로 물리적으로 움직이는 것을 말합니다.
중요: 6축 암은 VEXcode EXP 내에서 티치 펜던트에서 수동 이동이 활성화된 후에만 손으로 움직여야 합니다. 수동 이동 기능을 활성화하지 않은 채 6축 암을 손으로 움직이려고 하면 6축 암이 손상될 수 있습니다.
아래 단계에 따라 티치 펜던트를 열고 6축 암의 수동 이동을 활성화하세요.
티치 펜던트 아이콘을 선택하여 엽니다. 6축 암이 VEX코드에 연결되어 있는지 확인하세요.
참고:6축 암이 아직 연결되지 않은 경우 티치 펜던트를 사용하려면 6축 암을 연결하라는 메시지가 표시됩니다.

티치 펜던트를 사용하려면안전 위치로 이동을 선택하세요.
이렇게 하면 6축 암이 일관된 '안전' 위치(약 (120, 0, 100))로 이동합니다. 선택하면 티치 펜던트 기능이 활성화됩니다.

수동 모드 활성화선택하여 수동 이동을 활성화합니다.

수동 모드에서는 티치 펜던트의 상태 표시줄에 '수동 모드 활성화'가 표시되고 조깅 기능이 비활성화됩니다.

(x, y, z) 좌표 수집
수동 이동이 활성화되면 6축 암을 원하는 위치로 물리적으로 움직여 (x, y, z) 좌표를 수집할 수 있습니다. 아래 단계에 따라 타일 위치 34의 좌표를 수집하세요.
이 영상에서 보여지는 것처럼 6축 암의 끝을 물리적으로 움직여 자석 픽업 도구가 타일 위치 34에 닿도록 합니다.
(x, y, z) 좌표는 티치 펜던트 대시보드에 표시됩니다. 6축 암이 움직이면 실시간으로 업데이트됩니다(위의 영상 참조).

엔지니어링 노트북에 타일 위치 34의 (x, y, z) 좌표를 기록하세요.

활동
이제 6축 암을 수동으로 움직이는 방법을 배웠으므로 여러 타일 위치의 좌표를 기록하는 연습을 해보겠습니다. 이전 수업에서 추정한 것과 동일한 타일 위치의 좌표를 수집하고 기록하게 됩니다. 이 활동을 완료할 때 해당 추정치를 사용할 수 있는지 확인하세요.
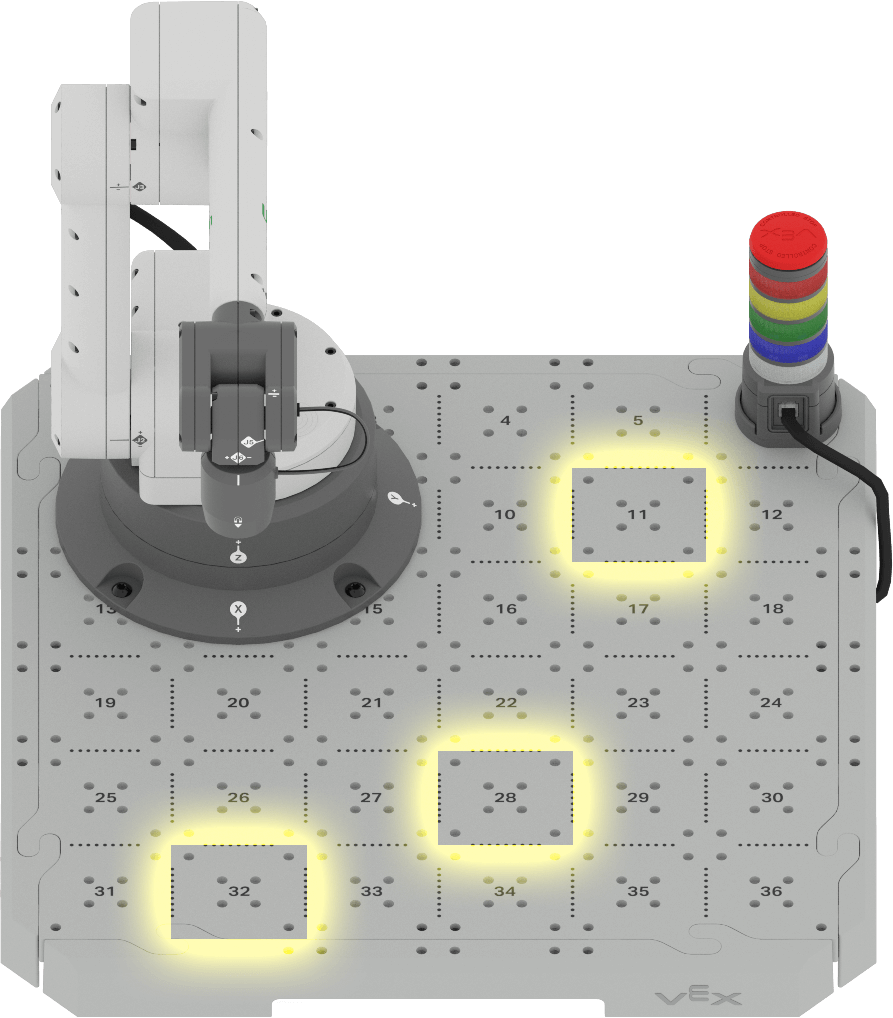
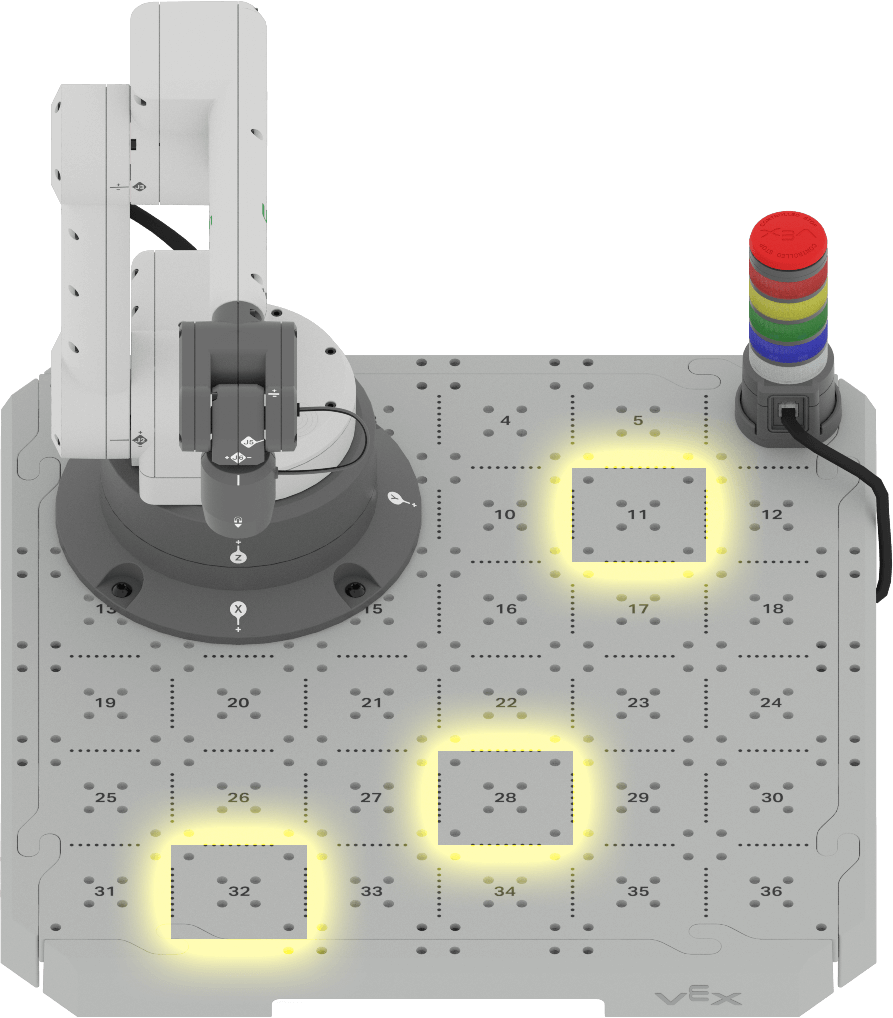
- 6축 암을 수동으로 이동하고 엔지니어링 노트북에 다음 타일 위치의 (x, y, z) 좌표를 기록합니다.
- 타일 위치 11
- 타일 위치 32
- 타일 위치 28
- 수집한 좌표를 엔지니어링 노트북에서 이전 수업에서 추정한 동일한 타일 위치와 비교하세요. 귀하의 추정은 얼마나 정확했습니까?
이해도 확인
다음 수업을 시작하기 전에 엔지니어링 노트북에서 아래 문서의 질문에 답하여 이 수업의 개념을 이해했는지 확인하세요.
이해도 확인 질문 > (Google Doc / .docx / .pdf)
다음 > 선택하여 '모두 합치기' 활동에서 여러분의 기술을 결합하세요.