
Auparavant, dans cette unité, vous avez appris à faire ce qui suit :
- Identifier les comportements du robot nécessaires pour créer un projet VEXcode pour résoudre une tâche.
- Modifiez les comportements du robot.
- Codez le bras robotique à 6 axes pour qu'il se déplace le long des axes x, y et z.
Vous effectuerez une activité supplémentaire dans cette unité avec le bras à 6 axes rassemblant toutes ces compétences.
Activité « Tout mettre ensemble »
Regardez cette animation pour voir comment le bras à 6 axes pourrait se déplacer afin de terminer l'activité.
- Configuration: Placez 3 cubes sur la tuile :
- Cube 1 sur l'emplacement de la tuile 27
- Cube 2 sur l'emplacement de la tuile 29
- Emplacement du cube 3 sur la tuile 17
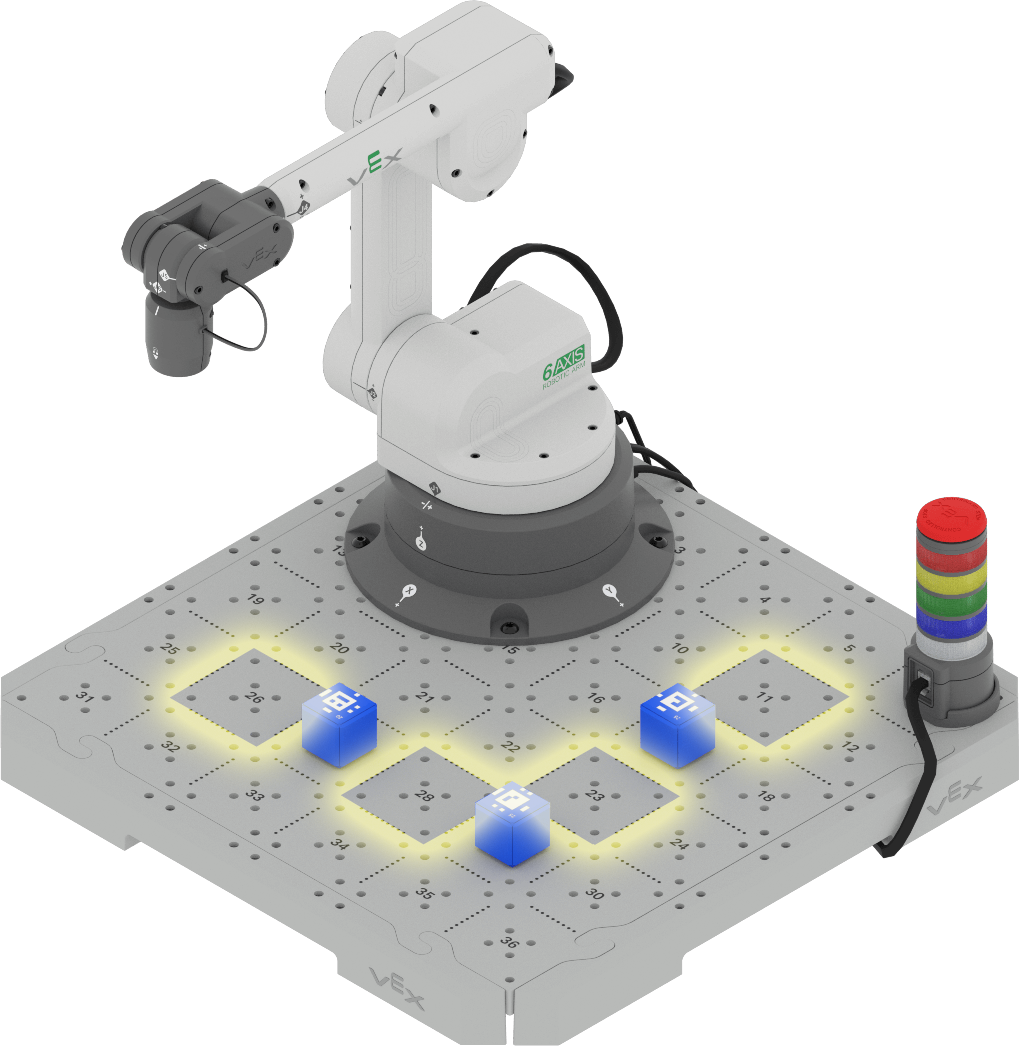
Activité : Créez un projet pour que le bras à 6 axes touche les emplacements de tuiles 26, 28, 23 et 11 sans heurter aucun des cubes.
- Commencez par charger le projet que vous avez créé dans la leçon 5 de l'unité 3. Renommer le projet. Vous pouvez maintenant modifier ce projet pour terminer l'activité.
- Une fois que vous avez créé votre projet, assurez-vous de l'enregistrer.
- Exécutez le projet pour le tester. Assurez-vous que le bras à 6 axes est connecté à VEXcode. Votre projet a-t-il réussi à déplacer le bras à 6 axes pour toucher les quatre emplacements de tuiles ? Sinon, continuez à modifier votre projet et testez-le jusqu'à ce que vous réussissiez.
- Documentez votre projet en l'enregistrant dans votre cahier d'ingénierie.
Réflexion finale
Maintenant que vous avez codé le bras à 6 axes pour vous déplacer vers des emplacements de tuiles spécifiques, il est temps de réfléchir à ce que vous avez appris et fait dans cette unité.
Évaluez-vous en tant que novice, apprenti ou expert sur chacun des concepts suivants dans votre cahier d'ingénierie. Expliquez brièvement pourquoi vous vous êtes attribué cette note pour chaque concept :
- identifier les comportements du robot nécessaires à la création d'un projet VEXcode pour résoudre une tâche.
- modifier les comportements des robots.
- codant le bras à 6 axes pour se déplacer le long des axes x, y et z.
Utilisez ce tableau pour vous aider à déterminer à quelle catégorie vous appartenez.
|
Expert |
J'ai l'impression que j'ai bien compris le concept et que je pourrais l'enseigner à quelqu'un d'autre. |
| Apprenti | J'ai l'impression d'avoir suffisamment compris le concept pour terminer l'activité. |
| Novice | Je sens que je n'ai pas compris le concept et que je ne sais pas comment terminer l'activité. |
Ensuite, réfléchissez aux objectifs d'apprentissage que vous avez co-créés avec votre enseignant pour cette unité. Avez-vous appris ce que vous aviez l'intention d'apprendre ? Pourquoi ou pourquoi pas ? Avec quoi avez-vous eu le plus de succès ? Pourquoi ? Comment pensez-vous pouvoir vous appuyer sur vos progrès pour aller de l'avant ?
Chaque personne de votre groupe doit compléter ses auto-réflexions dans ses cahiers d'ingénierie. Une fois que tous les membres de votre groupe ont terminé leurs auto-réflexions, faites le point avec votre enseignant et faites-lui savoir que vous êtes prêt pour votre conversation de débriefing.
Débriefing de la conversation

À l'aide de vos réflexions et de vos notes dans votre cahier d'ingénierie, évaluez la rubrique Débriefing (Google Doc / .docx / .pdf). Pour chacun des sujets, notez-vous comme Expert, Apprenti ou Novice.
Demandez à votre instructeur si vous avez besoin d'éclaircissements sur ce que l'on attend de vous au cours de cette auto-évaluation.
Sélectionnez < Retour aux unités pour revenir à toutes les unités.