
Alles bij elkaar voegen
Eerder in deze module hebt u het volgende geleerd:
- Identificeer het robotgedrag dat nodig is om een VEXcode-project te maken om een taak op te lossen.
- Pas het gedrag van robots aan.
- Programmeer de 6-assige robotarm zodat deze langs de x-, y- en z-as kan bewegen.
In deze unit voer je nog een extra activiteit uit met de 6-assige arm, waarbij je al deze vaardigheden combineert.
Activiteit 'Alles bij elkaar zetten'
Bekijk de onderstaande animatie om te zien hoe de 6-assige arm kan bewegen om de activiteit te voltooien. In deze animatie begint de 6-assige arm in de veilige positie en beweegt vervolgens naar beneden langs de z-as om de tegel links van het eerste kubusobstakel te raken. Vervolgens beweegt het omhoog, over en omlaag om de tegel tussen elk van de resterende kubussen te raken. Hierbij worden de bewegingen op de x-, y- en z-as zo uitgevoerd dat elke locatie bereikt wordt zonder de kubussen te raken.
- Opstelling: Plaats 3 kubussen op de tegel:
- Kubus 1 op tegellocatie 27
- Kubus 2 op tegellocatie 29
- Kubus 3 op tegellocatie 17
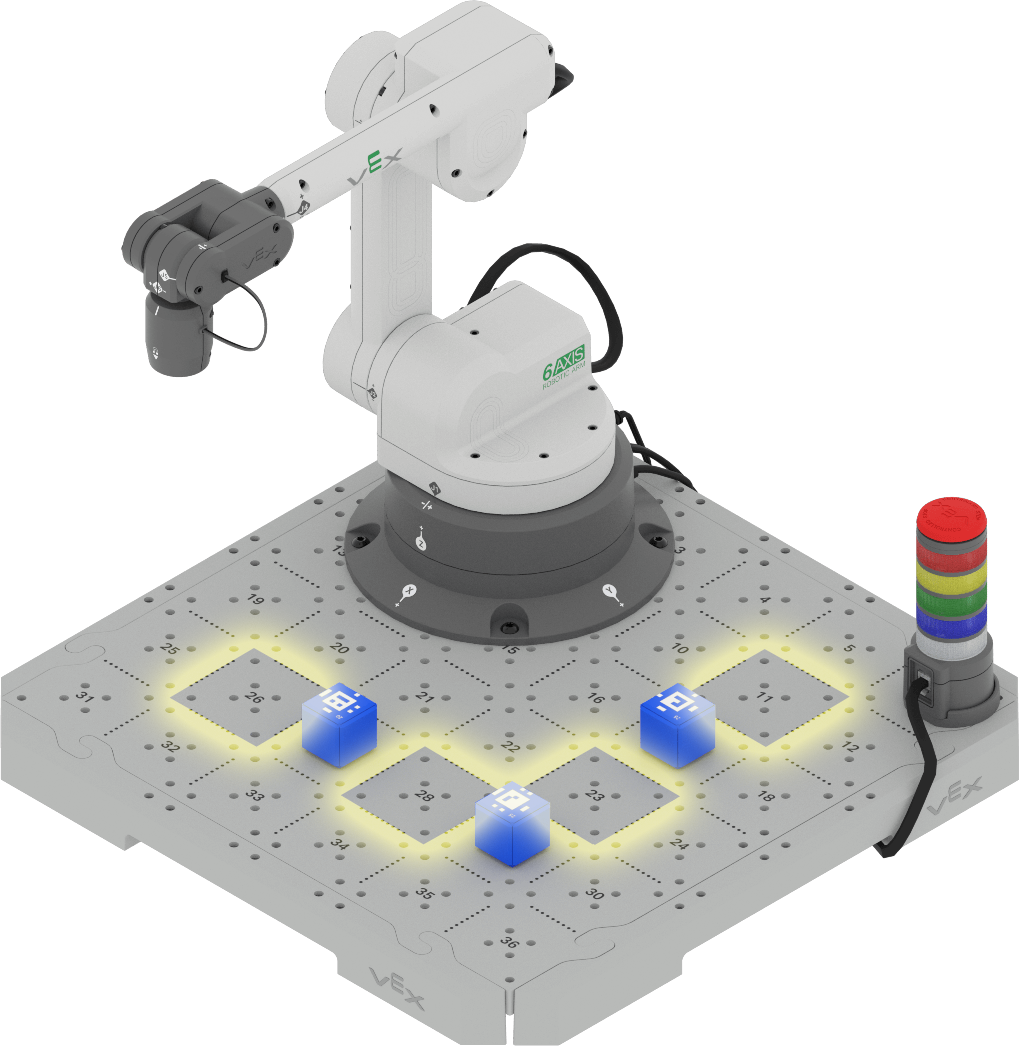
Activiteit: Maak een project waarmee de 6-assige arm de tegellocaties 26, 28, 23 en 11 kan raken zonder de kubussen te raken.
- Begin met het laden van het project dat u in Unit 3 Les 5 hebt gemaakt. Geef het project een nieuwe naam. U kunt dit project nu aanpassen om de activiteit te voltooien.
- Nadat u uw project hebt aangemaakt, zorg er dan voor dat u het opslaat.
- Voer het project uit om het te testen. Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode. Is het project succesvol verlopen en is de 6-assige arm op alle vier de tegellocaties terechtgekomen? Als dat niet lukt, blijf dan uw project aanpassen en testen totdat het wel lukt.
- Documenteer uw project door het in uw technisch notitieboekje te noteren.
Afsluitende reflectie
Nu u de 6-assige arm hebt geprogrammeerd om naar specifieke tegellocaties te bewegen, is het tijd om te reflecteren op wat u in deze unit hebt geleerd en gedaan.
Geef in uw technische notitieboekje aan dat u op elk van de volgende concepten een beginner, leerling of expert bent. Geef een korte uitleg waarom u uzelf die beoordeling voor elk concept hebt gegeven:
- Identificeren van het robotgedrag dat nodig is om een VEXcode-project te maken om een taak op te lossen.
- het gedrag van robots aanpassen.
- het coderen van de 6-assige arm zodat deze langs de x-, y- en z-as kan bewegen.
Gebruik deze tabel om te bepalen in welke categorie u valt.
| Deskundige | Ik heb het gevoel dat ik het concept volledig begrijp en dit aan iemand anders kan uitleggen. |
| Leerling | Ik heb het gevoel dat ik het concept voldoende begrijp om de activiteit te voltooien. |
| Beginner | Ik heb het gevoel dat ik het concept niet begrijp en weet niet hoe ik de activiteit moet voltooien. |
Denk vervolgens na over de leerdoelen die u samen met uw docent voor deze module hebt opgesteld. Heb je geleerd wat je wilde leren? Waarom wel of waarom niet? Waarmee had je het meeste succes? Waarom? Hoe denk je dat je verder kunt bouwen op je vooruitgang?
Iedereen in jouw groep moet zijn of haar zelfreflectie in zijn of haar ingenieursnotitieboek schrijven. Zodra iedereen in je groep zijn of haar zelfreflectie heeft afgerond, neem je contact op met je docent en laat je hem of haar weten dat je klaar bent voor het nabesprekingsgesprek.
Debriefinggesprek
Gebruik je reflecties en aantekeningen in je technische notitieboekje om jezelf te beoordelen op de Debrief Conversation Rubric (Google Doc / .docx / .pdf). Geef uzelf voor elk onderwerp een beoordeling als Expert, Leerling of Beginner.
Vraag uw instructeur om verduidelijking als u wilt weten wat er van u verwacht wordt tijdens deze zelfevaluatie.

Selecteer < Terug naar eenheden om terug te gaan naar alle eenheden.