
모두 합치기
이 단원의 이전 단계에서는 다음 작업을 수행하는 방법을 배웠습니다.
- 작업을 해결하기 위한 VEXcode 프로젝트를 만드는 데 필요한 로봇 동작을 식별합니다.
- 로봇의 행동을 수정합니다.
- 6축 로봇팔을 x, y, z축을 따라 움직이도록 코딩합니다.
이 단원에서는 6축 팔을 사용하여 이러한 모든 기술을 하나로 모아 하나의 추가 활동을 완료하게 됩니다.
모두 함께 모으기 활동
아래 애니메이션을 시청하여 6축 팔이 어떻게 움직여 활동을 완료하는지 확인하세요. 이 애니메이션에서는 6축 암이 안전한 위치에서 시작한 다음 z축을 따라 아래로 이동하여 첫 번째 큐브 장애물 왼쪽에 있는 타일에 닿습니다. 그런 다음 각 큐브 사이의 타일에 닿기 위해 위, 위, 아래로 이동하며, 큐브에 닿지 않고 각 위치에 도달할 때까지 필요에 따라 x, y, z축에서 이동을 순서대로 진행합니다.
- 설정: 타일에 큐브 3개 놓기:
- 타일 위치 27의 큐브 1
- 타일 위치 29의 큐브 2
- 타일 위치 17의 큐브 3
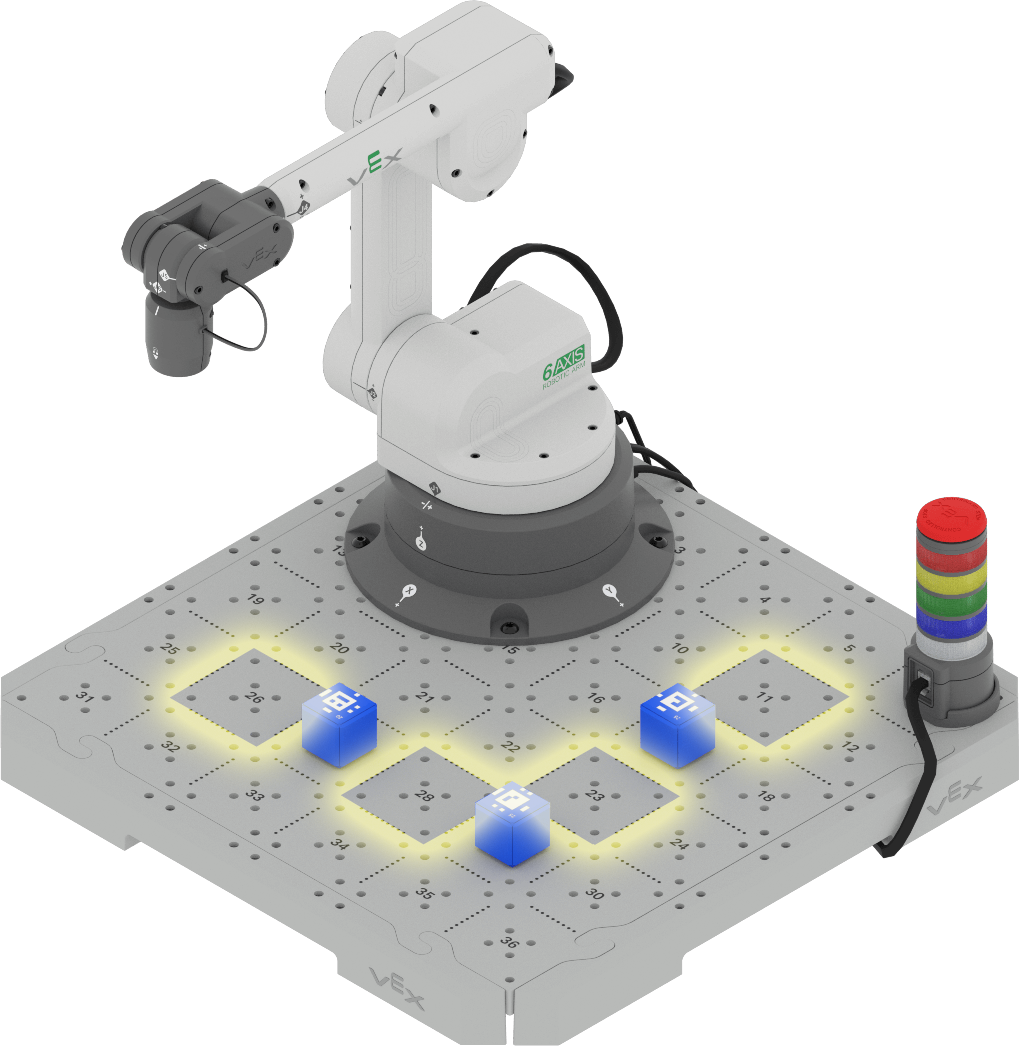
활동: 큐브에 부딪히지 않고 6축 팔이 타일 위치 26, 28, 23, 11에 닿도록 하는 프로젝트를 만듭니다.
- 3단원 5과에서 만든 프로젝트를 로드하여 시작하세요. 프로젝트 이름을 바꾸세요. 이제 이 프로젝트를 수정하여 활동을 완료할 수 있습니다.
- 프로젝트를 만든 후에는 반드시 저장하세요.
- 프로젝트를 실행하여 테스트해 보세요. 6축 암이 VEX코드에 연결되어 있는지 확인하세요. 귀하의 프로젝트에서 6축 암이 4개의 타일 위치 모두에 닿도록 성공적으로 이동되었나요? 그렇지 않다면 프로젝트를 계속 수정하고 성공할 때까지 테스트하세요.
- 엔지니어링 노트북에 기록하여 프로젝트를 문서화하세요.
마무리 반성
이제 6축 팔을 특정 타일 위치로 이동하도록 코딩했으므로, 이 단원에서 배우고 수행한 내용을 되돌아볼 시간입니다.
엔지니어링 노트에 다음 개념 각각에 대해 초보자, 견습생, 전문가로 평가해 보세요. 각 개념에 대해 해당 평가를 내린 이유를 간략하게 설명해 주세요.
- 작업을 해결하기 위한 VEXcode 프로젝트를 만드는 데 필요한 로봇 동작을 식별합니다.
- 로봇의 행동을 수정합니다.
- 6축 팔을 x, y, z축을 따라 움직이도록 코딩합니다.
이 표를 사용하여 자신이 어느 범주에 속하는지 판단해 보세요.
| 전문가 | 저는 그 개념을 완전히 이해했고 다른 사람에게도 가르칠 수 있을 것 같습니다. |
| 도제 | 나는 활동을 완료하기에 충분히 개념을 이해했다고 느낀다. |
| 초심자 | 저는 개념을 이해하지 못하고 활동을 완료하는 방법도 모릅니다. |
그런 다음, 이 단원을 위해 선생님과 함께 만든 학습 목표를 되돌아보세요. 당신은 배우려고 했던 것을 다 배웠나요? 왜 그럴까? 아니면 왜 그렇지 않을까? 가장 성공적이었던 것은 무엇입니까? 왜? 앞으로 어떻게 진전을 이룰 수 있다고 생각하시나요?
그룹의 각 구성원은 엔지니어링 노트에 자기성찰 내용을 작성해야 합니다. 그룹에 있는 모든 사람이 자기성찰을 마치면 선생님께 체크인하고 토론을 위한 준비가 되었다고 알려주세요.
대화 브리핑
엔지니어링 노트북에 있는 반성과 메모를 활용하여 Debrief Conversation Rubric(Google Doc / .docx / .pdf)에서 자신을 평가하세요. 각 주제에 대해 전문가, 견습생, 초보자로 평가해 보세요.
자기평가에서 무엇을 기대해야 하는지에 대해 자세히 알고 싶으면 강사에게 문의하세요.

모든 단원으로 돌아가려면 < 으로 돌아가기를 선택하세요.