
Precedentemente in questa Unità, hai imparato a fare quanto segue:
- Identifica i comportamenti del robot necessari per creare un progetto VEXcode per risolvere un'attività.
- Modificare i comportamenti del robot.
- Codificare il braccio robotico a 6 assi per spostarsi lungo gli assi x, y e z.
Completerai un'attività aggiuntiva in questa unità con il braccio a 6 assi che mette insieme tutte queste abilità.
Attività Mettere tutto insieme
Guarda questa animazione per vedere come il braccio a 6 assi potrebbe muoversi per completare l'attività.
- Impostazione: posiziona 3 cubi sulla piastrella:
- Cubo 1 su posizione piastrelle 27
- Cubo 2 su posizione piastrelle 29
- Cubo 3 su posizione piastrella 17
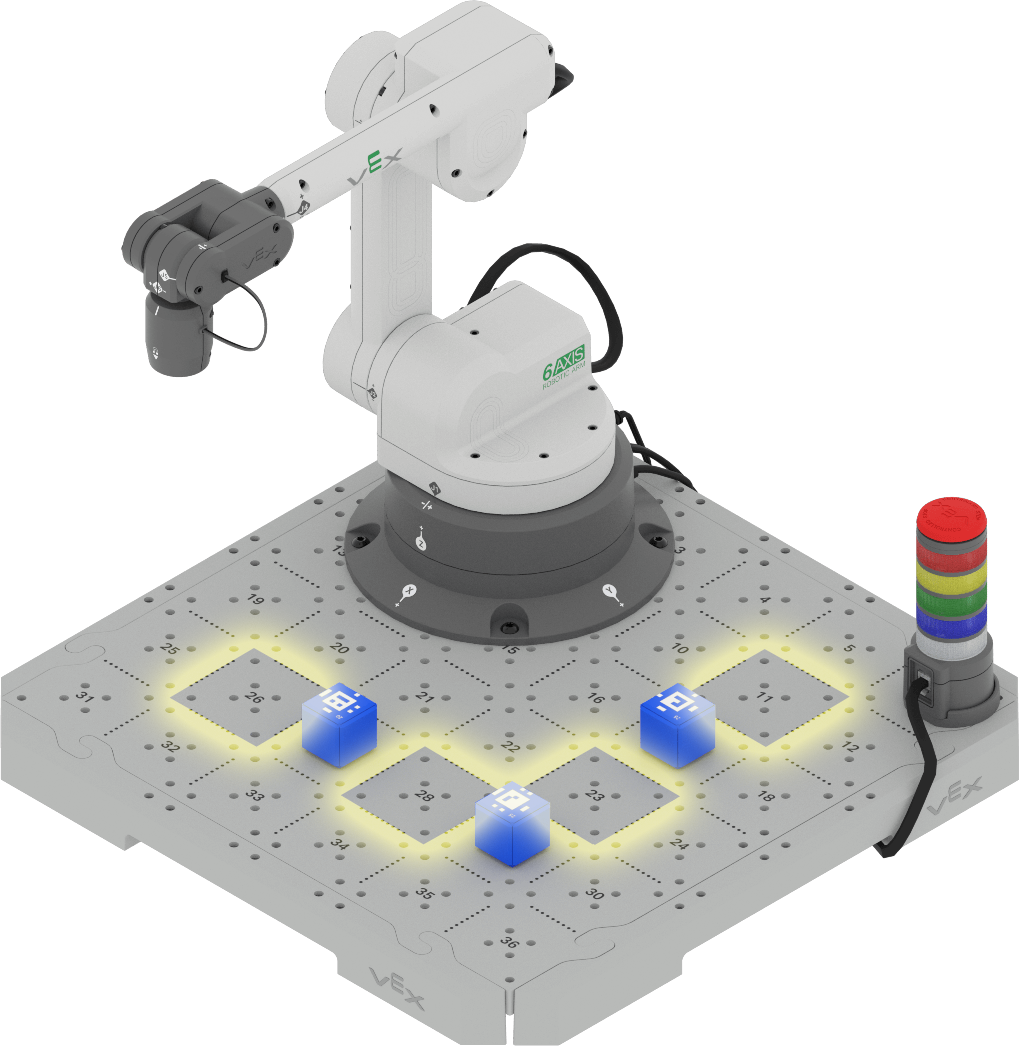
Attività: crea un progetto per il braccio a 6 assi per toccare le posizioni delle tessere 26, 28, 23 e 11 senza urtare nessuno dei cubi.
- Inizia caricando il progetto che hai creato nella lezione 5 dell'unità 3. Rinominare il progetto. Ora puoi modificare questo progetto per completare l'attività.
- Una volta creato il tuo progetto, assicurati di salvarlo.
- Eseguire il progetto per testarlo. Assicurarsi che il braccio a 6 assi sia collegato a VEXcode. Il tuo progetto ha spostato con successo il braccio a 6 assi per toccare tutte e quattro le posizioni delle piastrelle? In caso contrario, continua a modificare il tuo progetto e testalo fino a quando non avrai successo.
- Documenta il tuo progetto registrandolo nel tuo quaderno di ingegneria.
Riflessione sul riepilogo
Ora che hai codificato il braccio a 6 assi per spostarti in posizioni di piastrelle specifiche, è il momento di riflettere su ciò che hai imparato e fatto in questa unità.
Valutati come principiante, apprendista o esperto di ciascuno dei seguenti concetti nel tuo quaderno di ingegneria. Fornisci una breve spiegazione del motivo per cui ti sei assegnato quella valutazione per ogni concetto:
- identificare i comportamenti del robot necessari per creare un progetto VEXcode per risolvere un'attività.
- modificare i comportamenti dei robot.
- codifica del braccio a 6 assi per spostarsi lungo gli assi x, y e z.
Utilizza questa tabella per determinare in quale categoria rientri.
|
Esperto |
Sento di aver compreso appieno il concetto e di poterlo insegnare a qualcun altro. |
| Apprendista | Sento di aver capito il concetto abbastanza per completare l'attività. |
| Novizio | Sento di non aver capito il concetto e non so come portare a termine l'attività. |
Quindi, rifletti sugli obiettivi di apprendimento che hai co-creato con il tuo insegnante per questa unità. Hai imparato ciò che hai deciso di imparare? Perché sì o perché no? In cosa hai avuto più successo? Perché? Come pensi di poter migliorare i tuoi progressi andando avanti?
Ogni persona del tuo gruppo dovrebbe completare le proprie auto-riflessioni nei propri quaderni di ingegneria. Una volta che tutti nel tuo gruppo hanno completato le loro auto-riflessioni, fai il check-in con il tuo insegnante e fagli sapere che sei pronto per la tua conversazione di debriefing.
Debriefing della conversazione

Utilizzando le tue riflessioni e le tue note nel tuo quaderno di ingegneria, valutati nella Rubrica Debrief Conversation (Google Doc / .docx / .pdf). Per ciascuno degli argomenti, valutati come Esperto, Apprendista o Novizio.
Chiedi al tuo istruttore se hai bisogno di chiarimenti su ciò che ci si aspetta da te durante questa autovalutazione.
Selezionare < Return to Units (Ritorna alle unità) per tornare a tutte le unità.