
Kết hợp tất cả lại với nhau
Trước đó trong Đơn vị này, bạn đã học cách thực hiện những điều sau:
- Xác định các hành vi của robot cần thiết để tạo dự án VEXcode nhằm giải quyết một nhiệm vụ.
- Thay đổi hành vi của robot.
- Lập trình cho cánh tay robot 6 trục để di chuyển dọc theo trục x, y và z.
Bạn sẽ hoàn thành một hoạt động bổ sung trong Đơn vị này với Cánh tay 6 trục để kết hợp tất cả các kỹ năng này lại với nhau.
Hoạt động Kết hợp tất cả lại với nhau
Hãy xem hình ảnh động bên dưới để thấy Cánh tay 6 trục có thể di chuyển như thế nào để hoàn thành hoạt động này. Trong hình ảnh động này, Cánh tay 6 trục bắt đầu ở vị trí an toàn, sau đó di chuyển xuống trục z để chạm vào Ô bên trái của chướng ngại vật Khối lập phương đầu tiên. Sau đó, nó di chuyển lên, qua và xuống để chạm vào Ô giữa mỗi Khối còn lại, sắp xếp chuyển động theo trục x, y và z khi cần để đến được từng vị trí mà không chạm vào các Khối.
- Thiết lập: Đặt 3 khối lập phương trên ô:
- Khối 1 ở vị trí ô 27
- Khối lập phương 2 ở vị trí ô 29
- Khối 3 ở vị trí ô 17
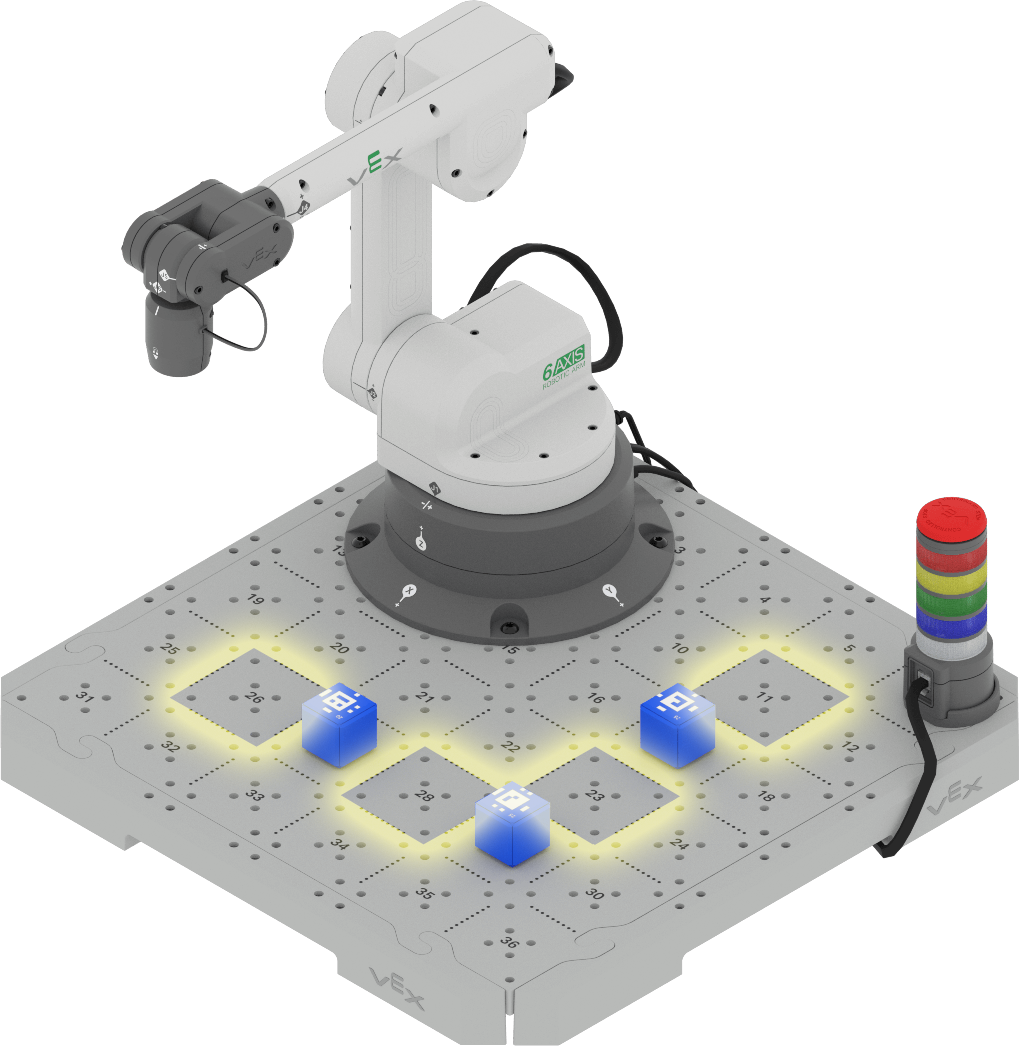
Hoạt động: Tạo một dự án cho Cánh tay 6 trục chạm vào các vị trí Gạch 26, 28, 23 và 11 mà không va vào bất kỳ Khối lập phương nào.
- Bắt đầu bằng cách tải dự án bạn đã tạo trong Bài 5 Đơn vị 3. Đổi tên dự án. Bây giờ bạn có thể sửa đổi dự án này để hoàn thành hoạt động.
- Sau khi tạo xong dự án, hãy nhớ lưu lại.
- Chạy dự án để kiểm tra. Đảm bảo rằng Tay 6 trục được kết nối với VEXcode. Dự án của bạn có di chuyển thành công Cánh tay 6 trục để chạm xuống cả bốn Vị trí Gạch không? Nếu không, hãy tiếp tục sửa đổi dự án của bạn và thử nghiệm cho đến khi thành công.
- Ghi lại dự án của bạn bằng cách ghi vào sổ tay kỹ thuật.
Tóm tắt suy ngẫm
Bây giờ bạn đã mã hóa Cánh tay 6 trục để di chuyển đến các Vị trí ô cụ thể, đã đến lúc suy ngẫm về những gì bạn đã học và thực hiện trong Đơn vị này.
Hãy đánh giá bản thân là người mới bắt đầu, người học việc hoặc chuyên gia về từng khái niệm sau đây trong sổ tay kỹ thuật của bạn. Hãy giải thích ngắn gọn lý do tại sao bạn tự đánh giá như vậy cho từng khái niệm:
- xác định các hành vi của robot cần thiết để tạo ra một dự án VEXcode nhằm giải quyết một nhiệm vụ.
- sửa đổi hành vi của robot.
- mã hóa cánh tay 6 trục để di chuyển dọc theo trục x, y và z.
Sử dụng bảng này để giúp bạn xác định mình thuộc nhóm nào.
| Chuyên gia | Tôi cảm thấy mình đã hiểu đầy đủ khái niệm này và có thể dạy lại cho người khác. |
| Người học việc | Tôi cảm thấy mình đã hiểu đủ khái niệm để hoàn thành hoạt động này. |
| Người mới bắt đầu | Tôi cảm thấy mình không hiểu khái niệm này và không biết cách hoàn thành hoạt động này. |
Sau đó, hãy suy ngẫm về các mục tiêu học tập mà bạn đã cùng giáo viên tạo ra cho Đơn vị này. Bạn đã học được những gì mình muốn học chưa? Tại sao nên hoặc không nên? Bạn thành công nhất ở điểm nào? Tại sao? Bạn nghĩ mình có thể phát triển tiến trình của mình như thế nào trong tương lai?
Mỗi người trong nhóm của bạn nên hoàn thành phần tự phản ánh của mình vào sổ tay kỹ thuật. Khi mọi người trong nhóm đã hoàn tất phần tự phản ánh, hãy liên hệ với giáo viên và cho họ biết bạn đã sẵn sàng cho cuộc trò chuyện tóm tắt.
Cuộc trò chuyện tóm tắt
Sử dụng những suy nghĩ và ghi chú trong sổ tay kỹ thuật của bạn, hãy tự đánh giá bản thân theo Tiêu chí thảo luận tóm tắt (Google Doc / .docx / .pdf). Đối với mỗi chủ đề, hãy đánh giá bản thân là Chuyên gia, Học viên hoặc Người mới bắt đầu.
Hãy hỏi người hướng dẫn nếu bạn cần giải thích rõ hơn về những gì được mong đợi ở bạn trong quá trình tự đánh giá này.

Chọn < Trở về Đơn vị để quay lại tất cả Đơn vị.