
Concurrence avec un but !
Vitesse et contrôle
Chaque année, les élèves peuvent concevoir et construire un robot pour jouer contre d'autres équipes dans un défi d'ingénierie basé sur le jeu présenté par la Fondation Robotic Education and Competition (Rec). Des tournois ont lieu toute l'année aux niveaux régional, étatique et national, menant au championnat du monde de robotique VEX chaque avril.
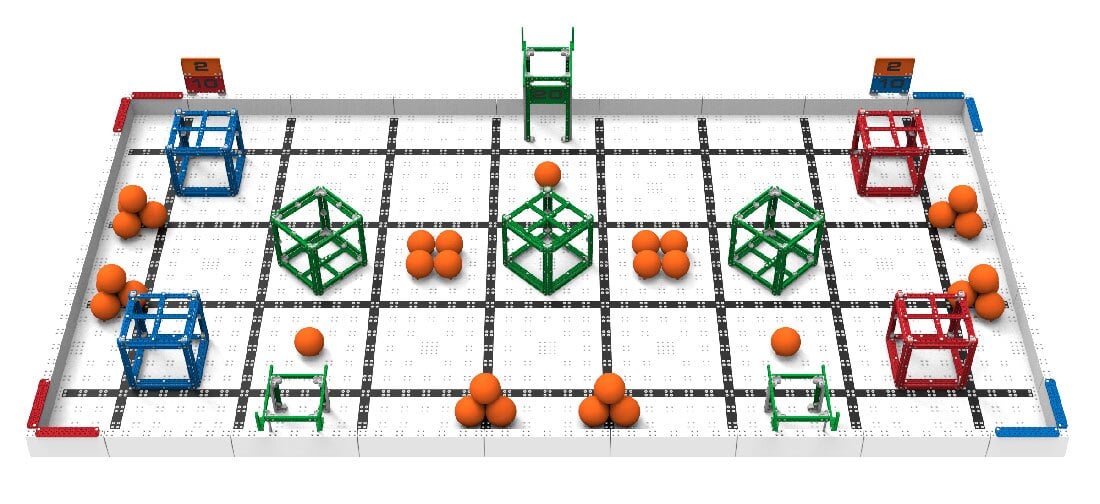
Le défi VEX IQ se joue sur un terrain rectangulaire de 4’x8’. Les équipes programment leurs robots pour qu'ils se déplacent sur le terrain en saisissant, en lançant et en plaçant des pièces de jeu dans les zones de score afin de gagner le plus de points.
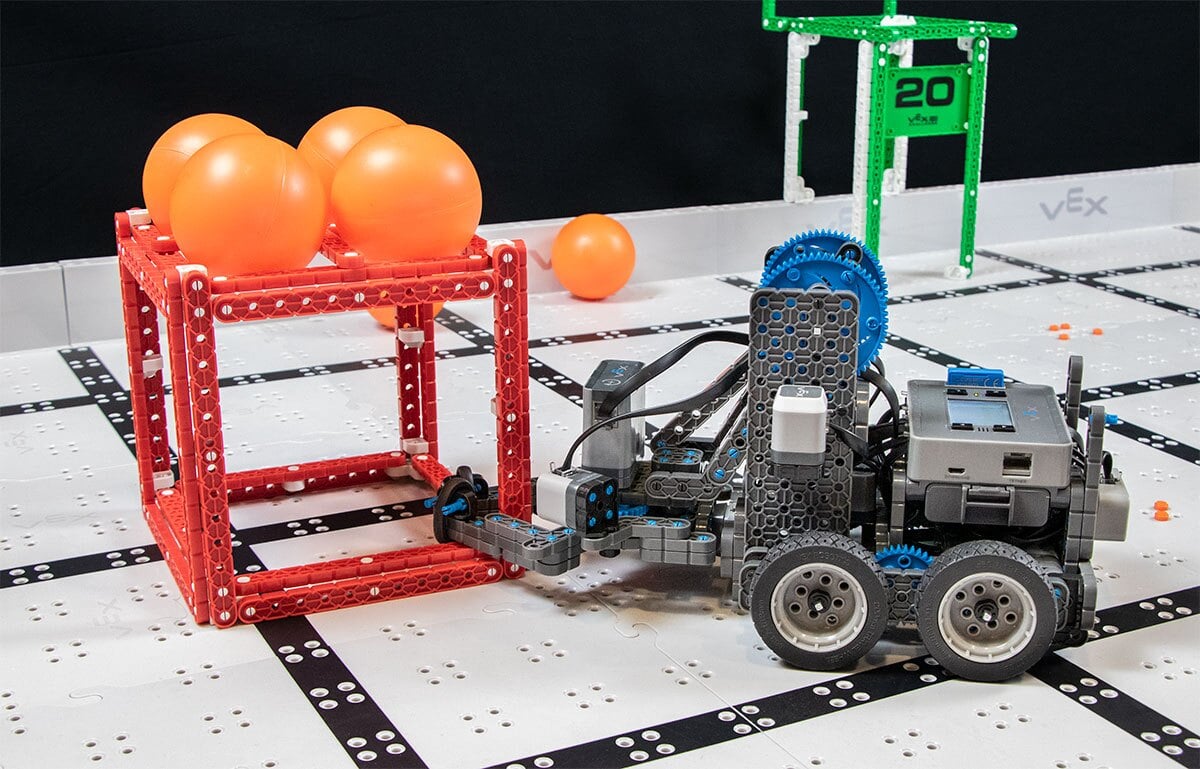
Dans le défi 2019-2020 intitulé Squared Away, les équipes doivent déplacer des balles dans les cases ainsi que sur le dessus des cases. Comme le Trash Robot italien, le pilote se déplacera délibérément et les équipes travailleront ensemble pour collecter et déplacer les carrés dans le bon espace colorimétrique aux coins de la planche.
Voici quelques comportements typiques pour un robot VEX :
- Avancer et reculer
- Tourner à gauche et à droite
- Saisir un objet de jeu
- Placer avec précision un objet de jeu
- Tri entre différents objets de jeu
- Lancer ou lancer un objet de jeu
Il y a deux types de défis que les équipes vont relever. Dans le Défi des compétences robotiques, les équipes essaient de marquer autant de points que possible avec leur construction robotique en deux types de matchs. Les matchs de compétences de conduite sont entièrement contrôlés par le conducteur et les matchs de compétences de programmation sont autonomes avec une interaction limitée avec l'élève. Le deuxième type de défi est le défi du travail d'équipe, dans lequel deux robots s'affrontent dans le défi en tant qu'alliance dans des matchs de 60 secondes, travaillant ensemble pour marquer le plus de points.
Les concours VEX donnent aux étudiants la possibilité de :
- Démontrer leurs compétences en conduite et en programmation.
- Travaillez en équipe pour résoudre les problèmes.
- Rencontrez de nouvelles personnes de leur communauté, de leur État et même d'autres pays.
- Amusez-vous bien !
![]() Conseils à l'enseignant
-
Échafaudage
Conseils à l'enseignant
-
Échafaudage
Demandez aux élèves de commencer par des tâches simples, puis de combiner ces tâches dans des programmes autonomes plus avancés. N'oubliez pas que les équipes peuvent réinitialiser leurs robots autant de fois qu'elles le souhaitent pendant la partie de programmation des compétences des robots.
![]() Étendez votre apprentissage
-
Commençons à planifier comme une équipe !
Étendez votre apprentissage
-
Commençons à planifier comme une équipe !
Visitez le site Web de la Fondation Rec et regardez la vidéo présentant le défi actuel en cliquant sur ce lien.
Mettez les élèves au défi de travailler en petits groupes pour réfléchir à une liste de comportements dont le robot d'une équipe aurait besoin pour résoudre le défi de cette année.
Les élèves doivent partager leurs idées avec le reste de la classe, puis combiner les listes en une liste maîtresse. Cette liste créée par l'élève peut être utilisée par l'enseignant à des fins de planification lors du choix de laboratoires STEM VEX supplémentaires à compléter.
Après avoir partagé leur liste de comportements, les étudiants peuvent être mieux préparés pour les concours en demandant aux groupes d'organiser les éléments suivants dans leurs cahiers d'ingénierie :
-
Esquissez le terrain de jeu et tracez les itinéraires que le robot doit suivre pour marquer des points.
-
Expliquez en langage clair chaque comportement que le robot doit effectuer (c'est ce qu'on appelle le pseudocode).