
Competição com um Propósito!
Velocidade e Controlo
A cada ano, os alunos podem projetar e construir um robô para jogar contra outras equipes em um desafio de engenharia baseado em jogos apresentado pela Fundação de Educação e Competição Robótica (REC). Os torneios são realizados durante todo o ano nos níveis regional, estadual e nacional, levando ao Campeonato Mundial de Robótica VEX a cada abril.
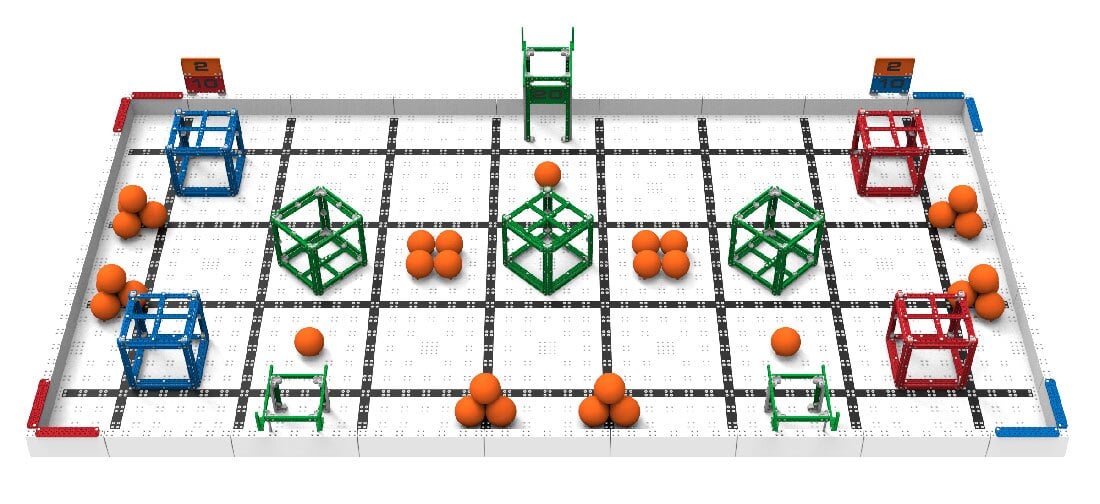
O Desafio VEX IQ é jogado num campo retangular de 4’x8’. As equipas programam os seus robôs para se moverem pelo campo agarrando, lançando e colocando peças de jogo em zonas de pontuação, a fim de ganhar o maior número de pontos.
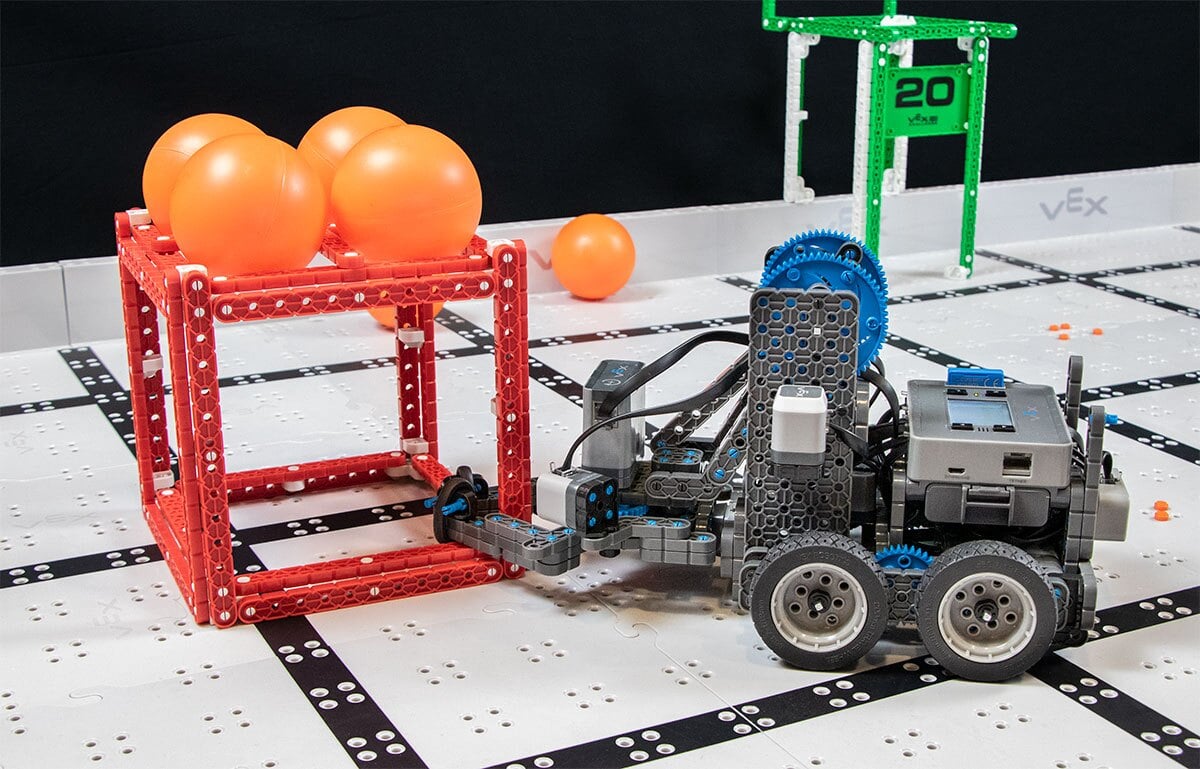
No desafio 2019-2020 intitulado Squared Away, as equipas têm de mover as bolas nas casas, bem como em cima das casas. Como o Trash Robot da Itália, o piloto se moverá propositalmente e as equipes trabalharão juntas para coletar e mover os quadrados para o espaço de cores correto nos cantos do tabuleiro.
Aqui estão alguns comportamentos típicos para um robô VEX:
- Avançar e retroceder
- Virar à esquerda e à direita
- Agarrar num objeto de jogo
- Colocar um objeto de jogo com precisão
- Ordenar entre diferentes objetos de jogo
- Atirar ou lançar um objeto de jogo
Existem dois tipos de desafios que as equipas enfrentarão. No Desafio de Perícias Robóticas, as equipes tentam marcar o máximo de pontos possível com sua construção robótica em dois tipos de partidas. As Correspondências de Habilidades de Condução são totalmente controladas pelo motorista e as Correspondências de Habilidades de Programação são autônomas com interação limitada do aluno. O segundo tipo de desafio é o Desafio de Trabalho em Equipe, no qual dois robôs competem no desafio como uma aliança em partidas de 60 segundos de duração, trabalhando juntos para marcar mais pontos.
As Competições VEX dão aos alunos a oportunidade de:
- Demonstrar as suas competências de condução e programação.
- Trabalhar juntos como uma equipa para resolver problemas.
- Conheça novas pessoas da sua comunidade, estado e até de outros países.
- Divirta-se!
![]() Dicas para Professores
-
Andaimes
Dicas para Professores
-
Andaimes
Peça aos alunos que comecem com tarefas simples primeiro e depois combinem essas tarefas em programas autônomos mais avançados. Lembre-se de que as equipes podem redefinir seus robôs quantas vezes quiserem durante a parte de Programação de Habilidades do Robô.
![]() Estenda a sua aprendizagem
-
Vamos começar a planear como uma equipa!
Estenda a sua aprendizagem
-
Vamos começar a planear como uma equipa!
Visite o site da Fundação REC e assista ao vídeo de apresentação do desafio atual clicando neste link.
Desafie os alunos a trabalhar em pequenos grupos para debater uma lista de comportamentos que o robô de uma equipe precisaria para resolver o desafio deste ano.
Os alunos devem partilhar as suas ideias com o resto da turma e, em seguida, combinar as listas numa lista mestra. Esta lista criada pelo aluno pode ser usada pelo professor para fins de planejamento ao escolher laboratórios STEM VEX adicionais para concluir.
Depois de compartilhar sua lista de comportamentos, os alunos podem ser preparados para competições, pedindo aos grupos que organizem o seguinte em seus cadernos de engenharia:
-
Esboce o campo de jogo e mapeie as rotas que o robô deve seguir para marcar pontos.
-
Explique em linguagem simples cada comportamento que o robô precisa realizar (isso é conhecido como pseudocódigo).