
पाठ 4: हीरा बनाना
पिछले पाठों में आपने लुप्त निर्देशांक ज्ञात करके त्रिभुज बनाना सीखा था। इस पाठ में, आप सीखेंगे कि जब 6-अक्ष भुजा x या y-अक्ष के साथ ऋणात्मक दिशा में चलती है तो क्या करना है, तथा लुप्त निर्देशांकों की गणना कैसे करनी है।
इस पाठ के अंत में, आप अपने द्वारा निर्धारित निर्देशांकों को जोड़कर एक हीरा बनाएंगे।
लुप्त निर्देशांक ढूँढना
पाठ 3 में आपने त्रिभुज के एक बिंदु और दो भुजाओं की लंबाई के आधार पर त्रिभुज के लुप्त निर्देशांक निर्धारित किए थे। अब आप उस प्रोजेक्ट पर काम करते हुए दूसरा त्रिभुज बनाएंगे।
बिंदु D ढूँढना
अपनी इंजीनियरिंग नोटबुक में ज्ञात जानकारी का रेखाचित्र बनाएं।
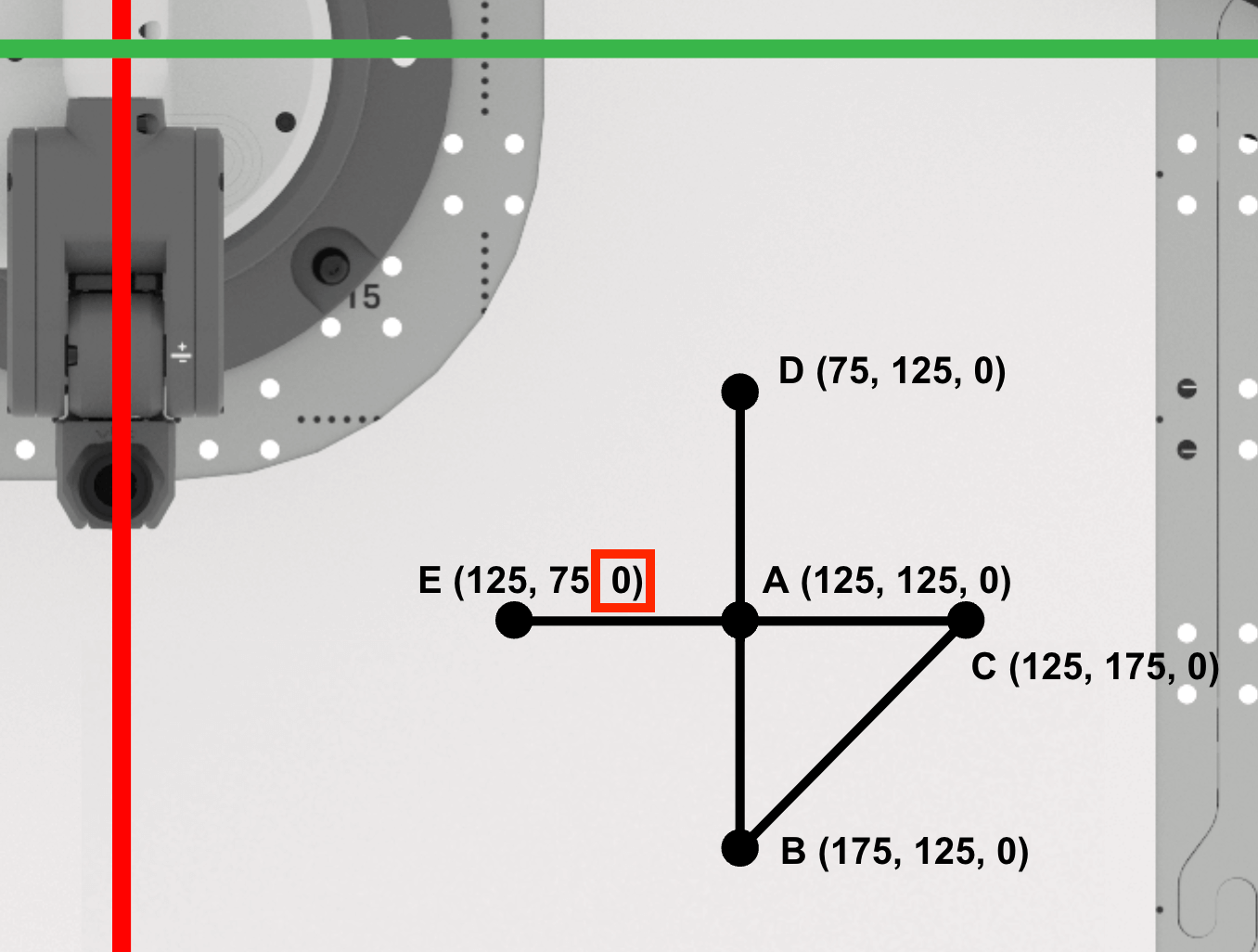
त्रिभुज ABC निम्नलिखित बिंदुओं पर स्थित है:
- ए (125, 125, 0)
- बी (175, 125, 0)
- सी (125, 175, 0)
यह वह त्रिभुज है जो आपने पाठ 3 में बनाया था।
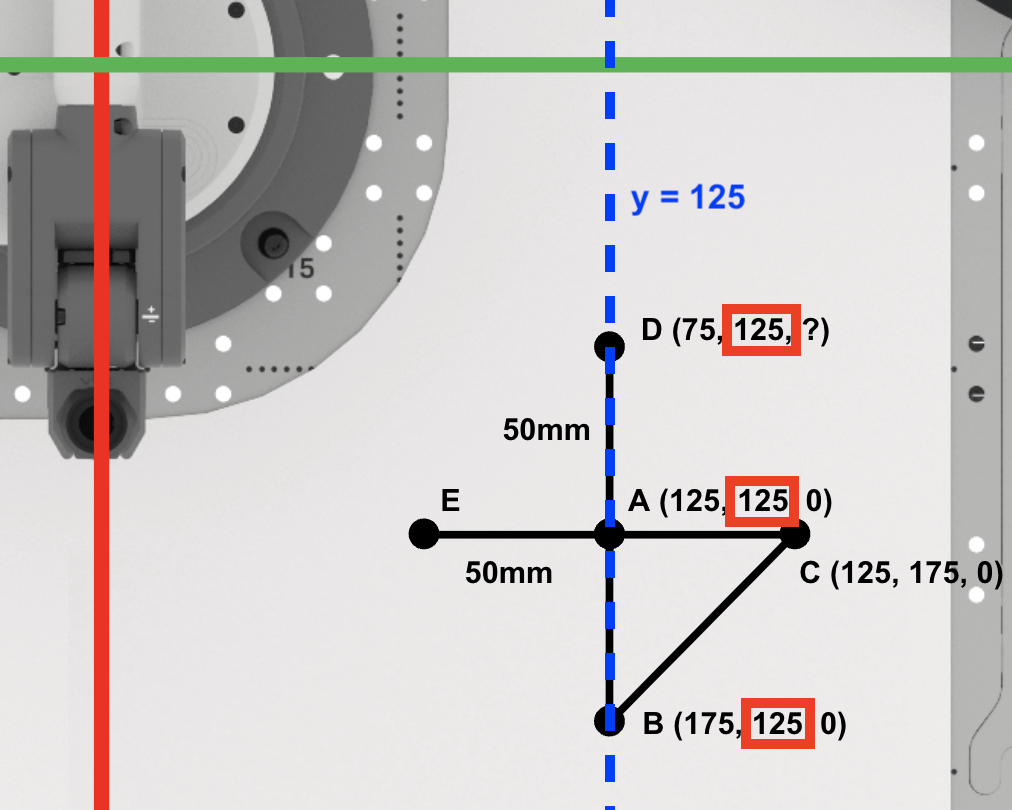
दूसरे त्रिभुज ADE की भुजाओं की लंबाई 50 मिमी है, जिसकी भुजाएँ AD और AE हैं। इस चित्र में त्रिभुज ADE की भुजाएँ नीली रेखाओं और पाठ के साथ दर्शाई गई हैं।
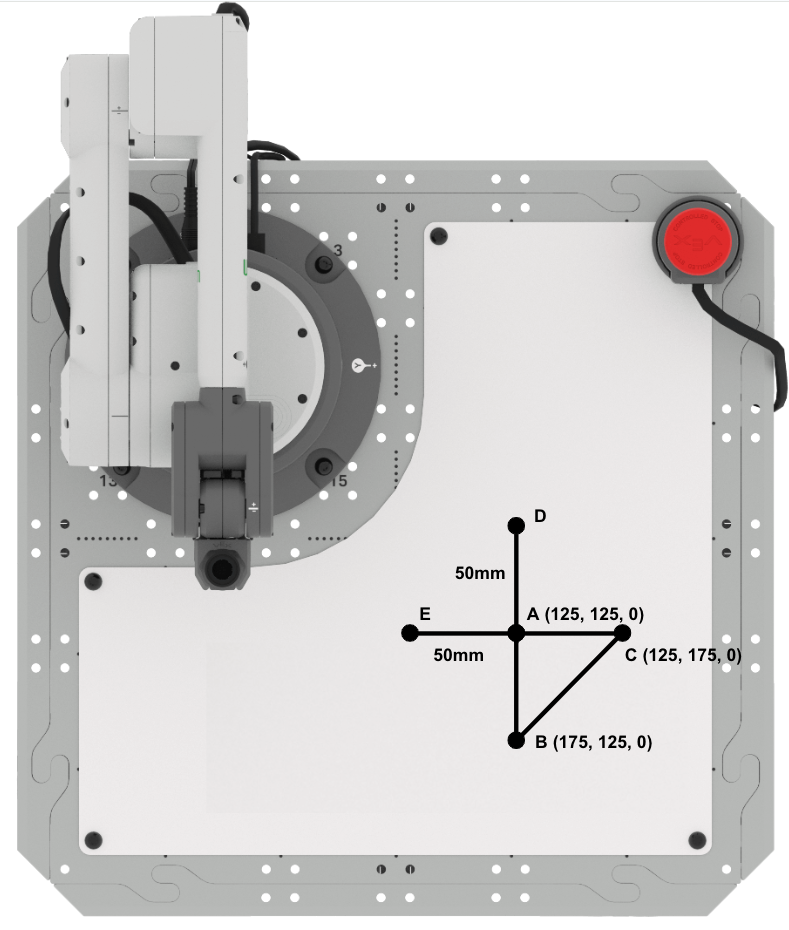
समकोण त्रिभुज ADE की भुजा AD, x-अक्ष के समांतर है।
ध्यान दें कि जैसे-जैसे आप x-अक्ष के अनुदिश बिंदु A से बिंदु D की ओर बढ़ते हैं, x-निर्देशांक का मानसे कम होता जाता है। यह बिंदु D के x-निर्देशांक की गणना करने के लिए प्रयुक्त समीकरण में प्रतिबिंबित होगा।
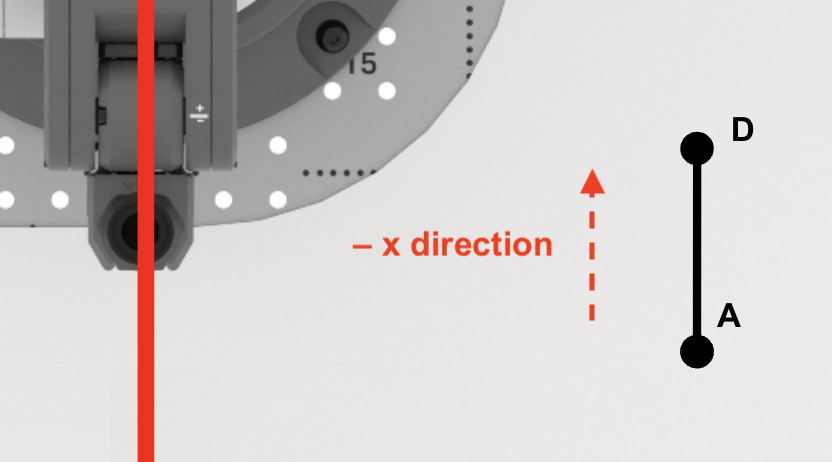
बिंदु D का x-निर्देशांक ज्ञात कीजिए।
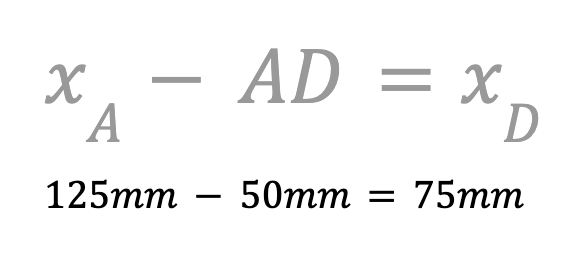
क्योंकि 6-अक्ष भुजा x-अक्ष के साथ ऋणात्मक दिशा में गति करेगी, इसलिए आपको घटाव का उपयोग करना होगा। बिंदु D का x-निर्देशांक ज्ञात करने के लिए बिंदु A के x-निर्देशांक से AD की लंबाई घटाएँ।
बिंदु D का x-निर्देशांक 75 मिमी है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
अब हम बिंदु D का y-निर्देशांक ज्ञात करेंगे।
चूँकि बिंदु A, B और D रेखा y=125 मिमी के अनुदिश हैं, इसलिए बिंदु D का y-निर्देशांक बिंदु A और B (125 मिमी) के समान है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
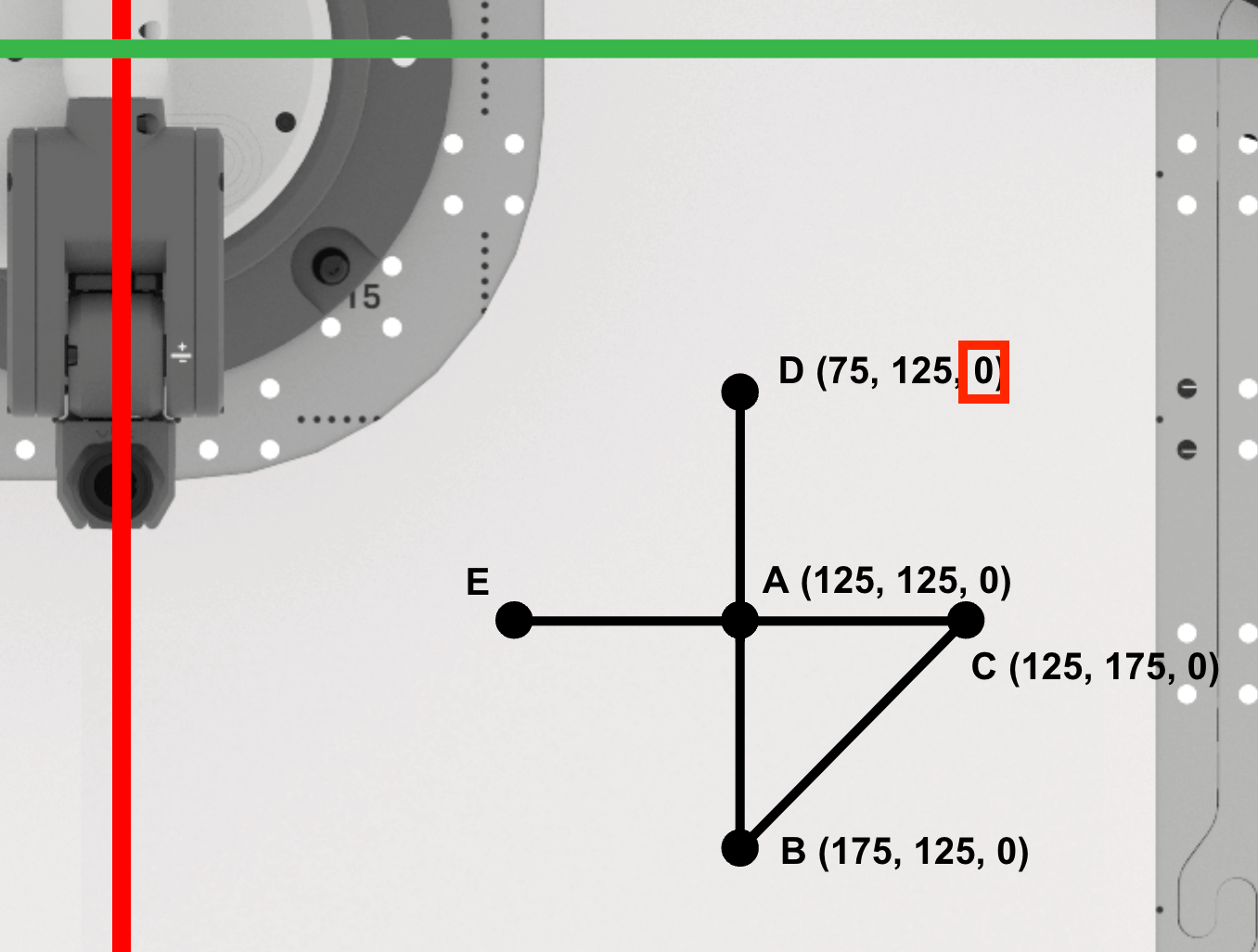
चूँकि पेन बिंदु A और D के बीच नहीं उठ रहा है, इसलिए बिंदु D का z-निर्देशांक शून्य रहेगा।
बिंदु D (75, 125, 0) है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
बिंदु E ढूँढना
बिंदु E का x-निर्देशांक ज्ञात कीजिए।
चूँकि बिंदु A, C और E रेखा x=125 मिमी के अनुदिश हैं, इसलिए बिंदु E का x-मान बिंदु A और C (125 मिमी) के समान है।
इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
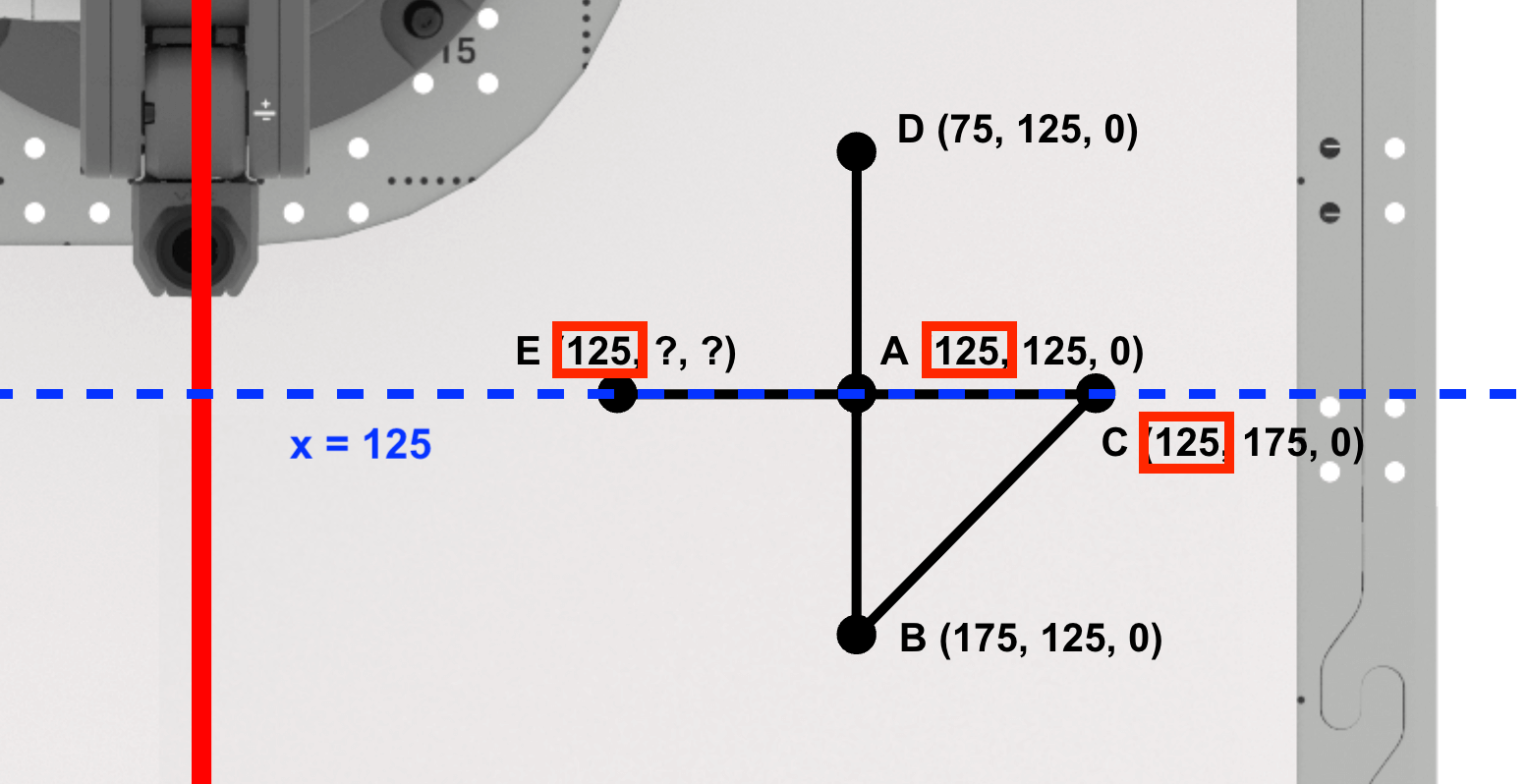
समकोण त्रिभुज ADE की भुजा AE, y-अक्ष के समान्तर है।
ध्यान दें कि यदि आप y-अक्ष के अनुदिश बिंदु A से बिंदु E तक जाते हैं, तो y-निर्देशांक का मानसे कम हो जाता है। यह बिंदु E के y-निर्देशांक की गणना करने के लिए प्रयुक्त समीकरण में प्रतिबिंबित होगा।

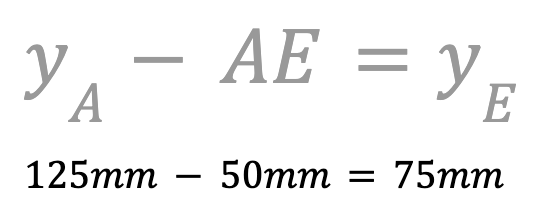
इसके बाद, बिंदु E का y-निर्देशांक ज्ञात कीजिए।
क्योंकि 6-अक्ष भुजा y-अक्ष के साथ नकारात्मक दिशा में चलेगी, इसलिए आपको घटाव का उपयोग करना होगा। बिंदु E का y-निर्देशांक ज्ञात करने के लिए बिंदु A के y-निर्देशांक से AE की लंबाई घटाएँ।
बिंदु E का y-निर्देशांक 75 मिमी है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
चूँकि पेन बिंदु D और E के बीच नहीं उठ रहा है, इसलिए बिंदु E का z-निर्देशांक शून्य रहेगा।
बिंदु E (125, 75, 0) है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
त्रिभुज ADE बनाने के लिए 6-अक्ष भुजा को कोड करना
अब जबकि आपने बिंदु D और E के निर्देशांक निर्धारित कर लिए हैं, तो अब समय आ गया है कि 6-अक्ष भुजा के लिए VEXcode EXP प्रोजेक्ट बनाया जाए, ताकि बिंदु A, D और E को जोड़कर एक और त्रिभुज बनाया जा सके।
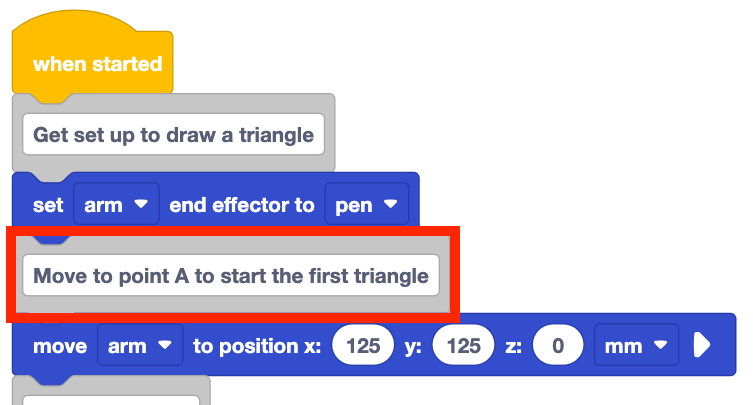
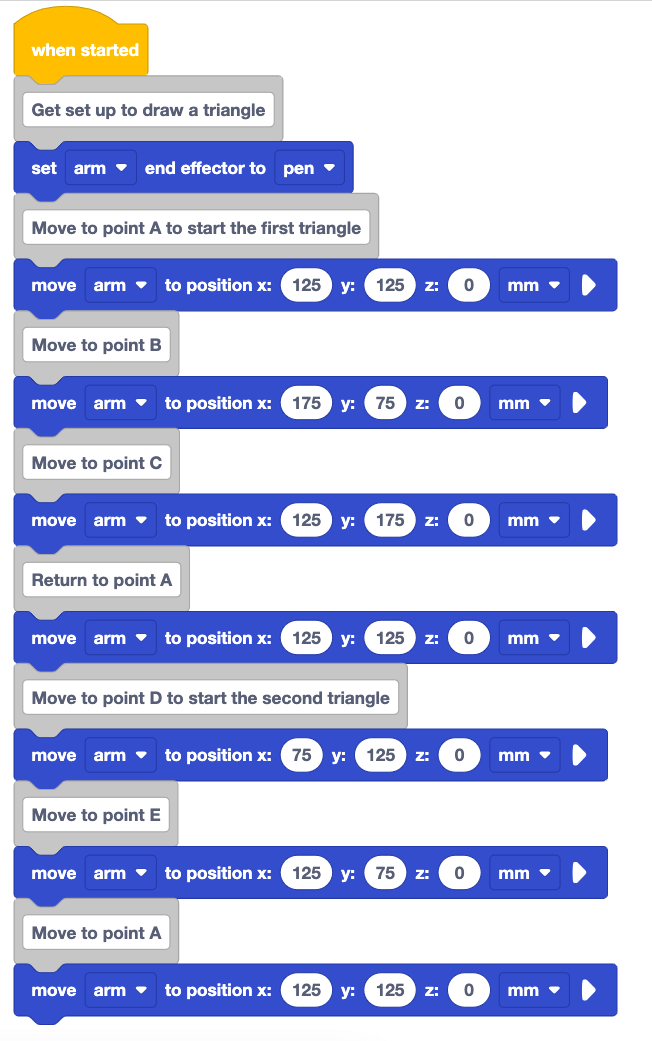
व्हाइटबोर्ड पर त्रिभुज ABC बनाने के लिए यूनिट 5 पाठ 3 प्रोजेक्ट खोलें, या यहां दिखाए अनुसार प्रोजेक्ट को पुनः बनाएं।

यहां दिखाए गए टिप्पणी ब्लॉक को "पहला त्रिभुज शुरू करने के लिए बिंदु A पर जाएं" में बदलें।
क्योंकि आप दो त्रिभुज बना रहे हैं, इसलिए टिप्पणी को बदला जा सकता है ताकि यह संदर्भ प्रदान किया जा सके कि परियोजना में कौन से ब्लॉक का उपयोग पहले त्रिभुज बनाम दूसरे त्रिभुज को बनाने के लिए किया गया है।
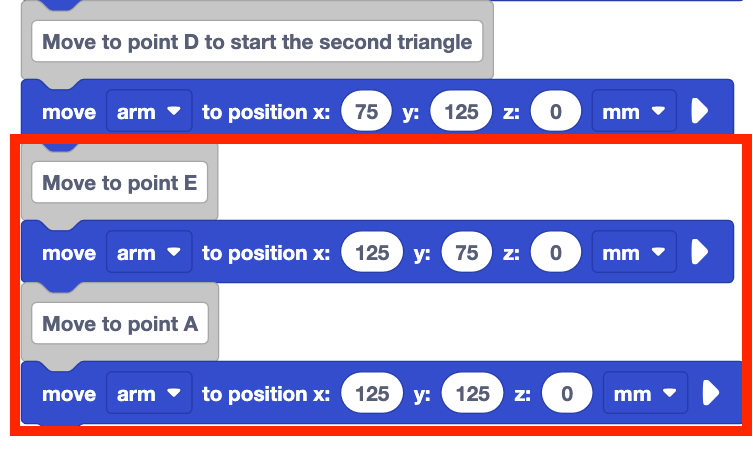
स्टैक के नीचे एक टिप्पणी ब्लॉक जोड़ें और "दूसरा त्रिभुज शुरू करने के लिए बिंदु D पर जाएँ" लिखें।

टिप्पणी ब्लॉक के नीचे स्टैक में स्थिति ब्लॉक पर जाएँ जोड़ें।
स्थिति ब्लॉक के पैरामीटर्स को बिंदु D के निर्देशांकों पर सेट करें, जो आपके इंजीनियरिंग नोटबुक में दर्ज है।

टिप्पणीब्लॉक और जोड़ें बिंदु E के लिए स्थिति ब्लॉक पर जाएं और दूसरे त्रिभुज को पूरा करने के लिए बिंदु A पर लौटें।
के पैरामीटर्स को स्थिति ब्लॉकों पर ले जाएं, बिंदु E और A के निर्देशांकों पर सेट करें, जो आपके इंजीनियरिंग नोटबुक में दर्ज किए गए थे।
अपने प्रोजेक्ट का नाम बदलना और उसे अपने डिवाइस पर सहेजना सुनिश्चित करें।
आपका पूरा प्रोजेक्ट पूरा होने पर इस तरह दिखना चाहिए।
जब आप अपना प्रोजेक्ट बनाना समाप्त कर लें, तो सुनिश्चित करें कि 6-एक्सिस आर्म VEXcode EXP से जुड़ा हुआ है और प्रोजेक्ट चलाएं।
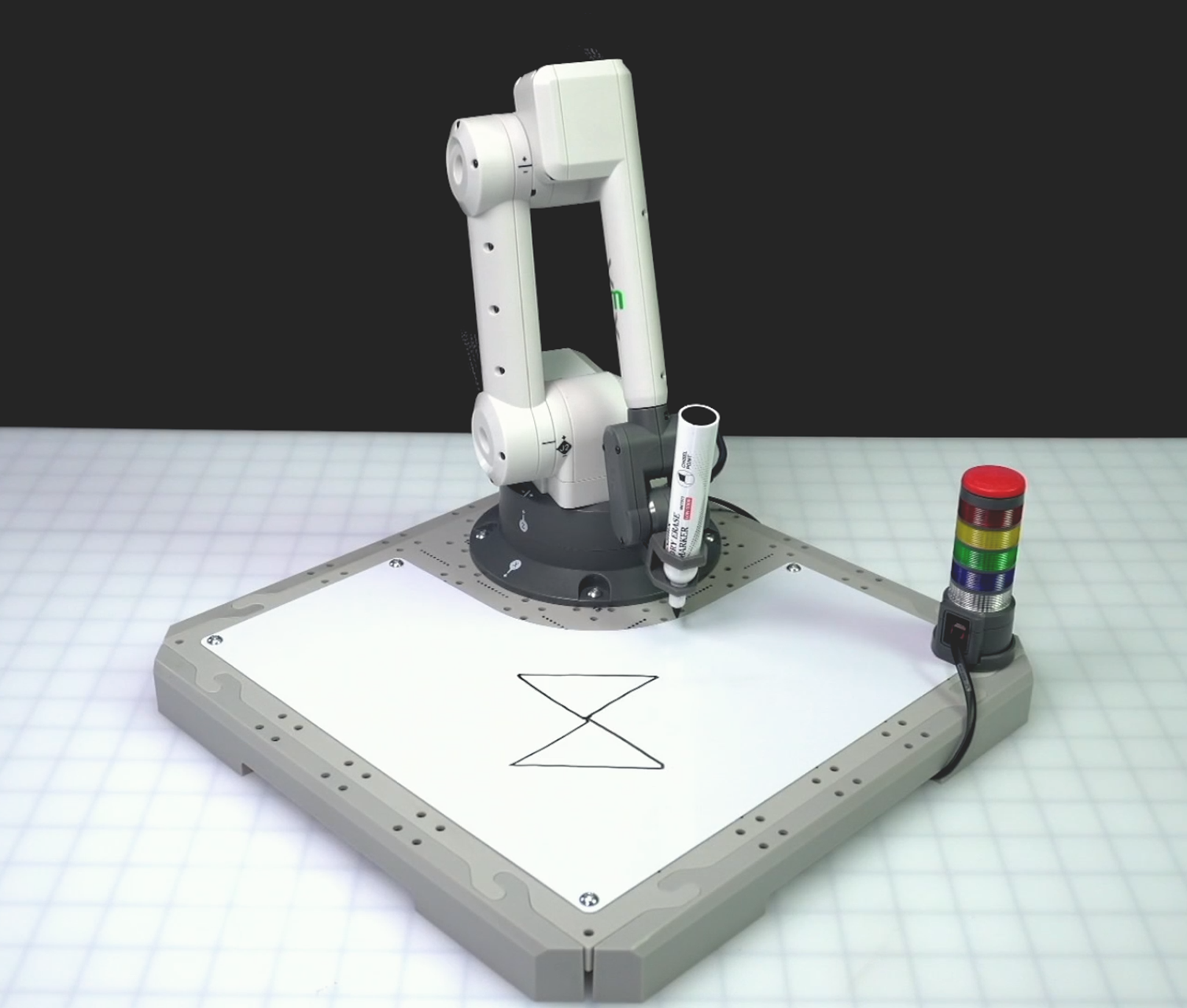
जब 6-अक्ष भुजा दो त्रिभुजों का चित्र बनाना समाप्त कर ले तो परियोजना को रोक दें।
6-अक्ष भुजा त्रिभुज ABC बनाएगी जैसा कि उसने पाठ 3 में किया था। फिर यह त्रिभुज ADE की पहली भुजा खींचने के लिए बिंदु D पर जाएगा। फिर 6-अक्ष भुजा त्रिभुज ADE की दूसरी भुजा को पूरा करने के लिए बिंदु D से बिंदु E तक जाएगी, और पैक को बिंदु A तक ले जाकर त्रिभुज को पूरा करेगी।
नोट:यह छवि प्रोजेक्ट को रोकने के बाद 6-अक्ष भुजा को मैन्युअल रूप से स्थानांतरित करते हुए दिखाती है ताकि दोनों त्रिकोण स्पष्ट रूप से देखे जा सकें।
गतिविधि
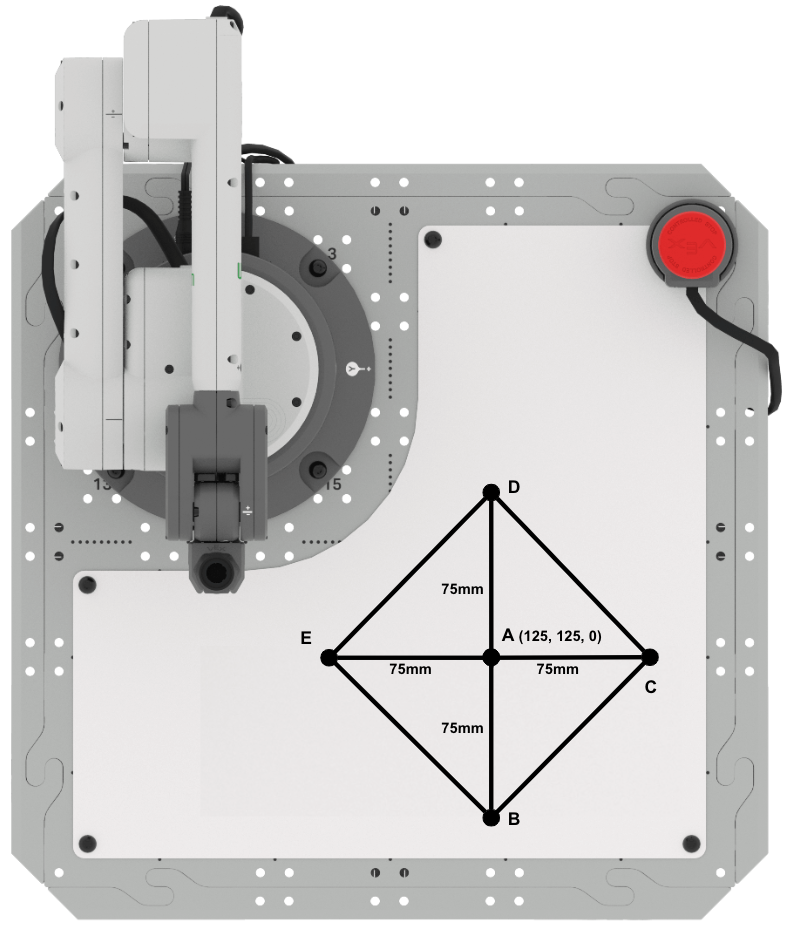
इस पाठ में आपने सीखा कि ऐसे त्रिभुज कैसे बनाएं जिनकी भुजाओं को अक्षों के अनुदिश ऋणात्मक दिशा में चलना पड़ता है। अब आप अपने सीखे हुए ज्ञान का प्रयोग चार त्रिभुजों से बने एक हीरे को बनाने में करेंगे।

- सेटअप:अपनी इंजीनियरिंग नोटबुक में ऊपर दिखाए अनुसार बिंदु A, B, C, D और E बनाएं।
- बिंदु A (125, 125, 0) पर स्थित है
- भुजाओं की लंबाई AB, AC, AD और AE 75 मिमी है
- गतिविधि:
- उपरोक्त बिंदु B, C, D, और E के निर्देशांक निर्धारित करने के लिए पाठ 3 और 4 के सूत्रों का उपयोग करें। अपने इंजीनियरिंग नोटबुक में निर्देशांक रिकॉर्ड करें।
- बिंदुओं को जोड़ने और ऊपर दिखाए गए आकार को बनाने के लिए एक VEXcode EXP प्रोजेक्ट बनाएं।
- आप पाठ 4 परियोजना का निर्माण कर सकते हैं, या सिग्नल टॉवर टेम्पलेट परियोजनाडाउनलोड कर हैं।
- आरंभ करने के लिए सेट एंड इफ़ेक्टर ब्लॉक को पेनपर सेट करना सुनिश्चित करें।
- अपने प्रोजेक्ट में 6-अक्ष आर्म के व्यवहार को संप्रेषित करने के लिए टिप्पणियों का उपयोग करें।
- जब आप अपना प्रोजेक्ट बनाना समाप्त कर लें, तो उसका परीक्षण करने के लिए उसे चलाएँ।
- क्या आपके प्रोजेक्ट में ऊपर दिखाया गया हीरा बनाया गया है? यदि नहीं, तो अपनी परियोजना को संशोधित करते रहें और सफल होने तक उसका परीक्षण करते रहें।
- प्रोजेक्ट पूरा करने के बाद, प्रोजेक्ट का नाम बदलें और उसे अपने डिवाइस पर सेव करें।
अपनी समझ की जाँच करें
अगले पाठ पर जाने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
पुटिंग इट ऑल टुगेदर गतिविधि को पूरा करने के लिएअगला >चयन करें।