
Bài 4: Vẽ hình thoi
Trong các bài học trước, bạn đã học cách vẽ hình tam giác bằng cách tìm tọa độ còn thiếu. Trong Bài học này, bạn sẽ học cách xử lý khi Cánh tay 6 trục di chuyển dọc theo trục x hoặc y theo hướng âm và cách tính tọa độ bị thiếu.
Vào cuối bài học này, bạn sẽ vẽ một hình thoi bằng cách nối các tọa độ đã xác định.
Tìm tọa độ bị thiếu
Trong Bài 3, bạn đã xác định tọa độ còn thiếu của một tam giác dựa trên việc biết một điểm của tam giác và độ dài hai cạnh. Bây giờ bạn sẽ dựa vào dự án đó để vẽ một hình tam giác thứ hai.
Tìm điểm D
Phác thảo thông tin đã biết vào sổ tay kỹ thuật của bạn.
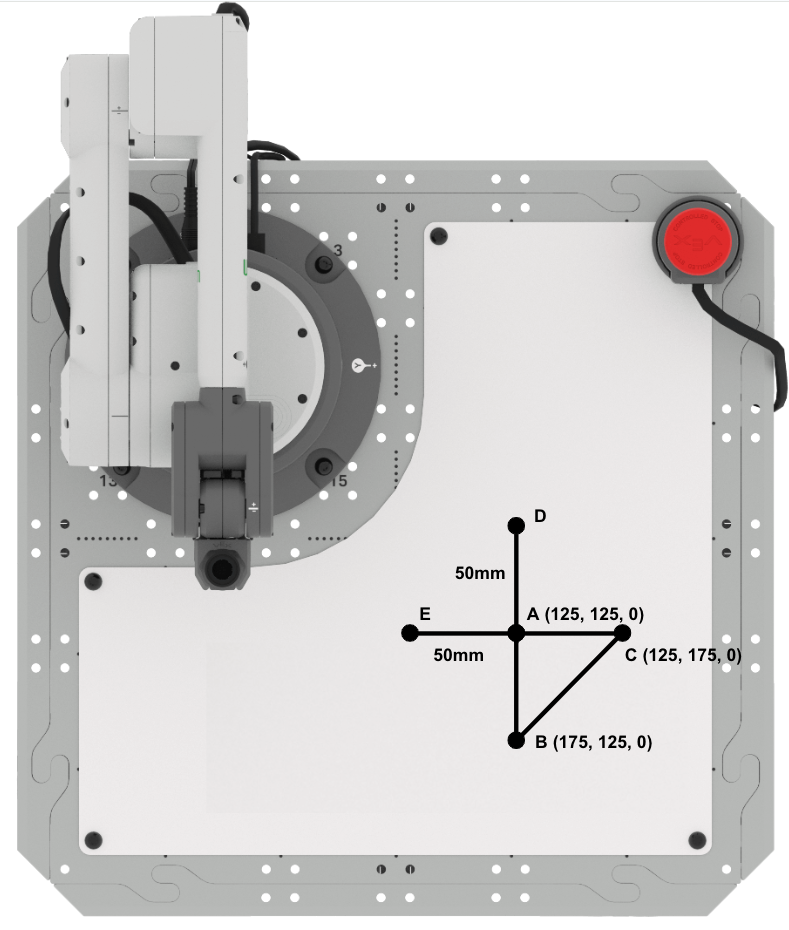
Tam giác ABC nằm tại các điểm:
- Một (125, 125, 0)
- B (175, 125, 0)
- C (125, 175, 0)
Đây là hình tam giác bạn đã vẽ ở Bài 3.
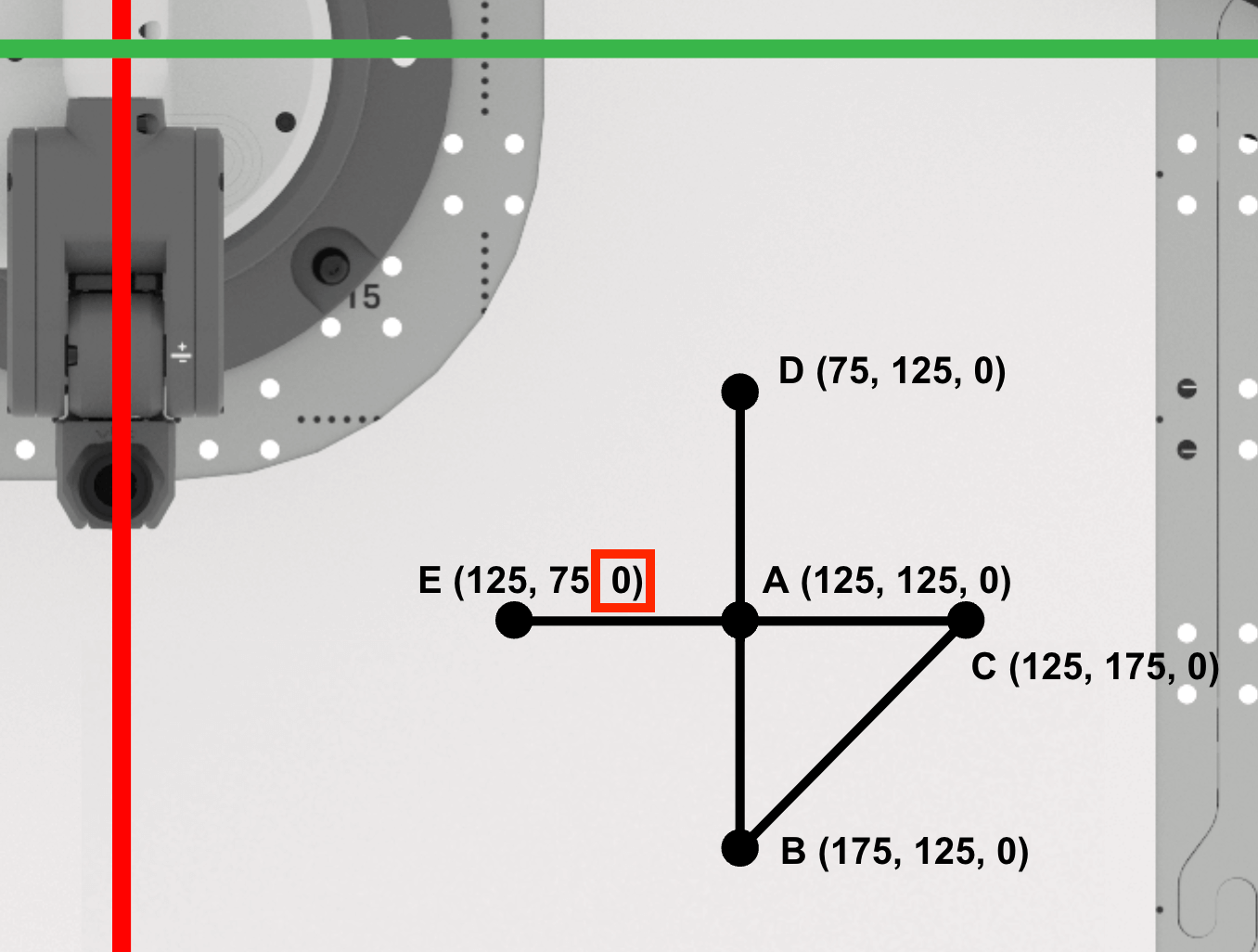
Hình tam giác thứ hai, ADE có độ dài cạnh là 50mm, cho các cạnh AD và AE. Các cạnh của tam giác ADE được thể hiện trong hình ảnh này bằng các đường màu xanh và văn bản.
Cạnh AD của tam giác vuông ADE song song với trục x.
Lưu ý rằng khi bạn di chuyển từ điểm A đến điểm D dọc theo trục x, tọa độ x sẽ có giá trị từđến. Điều này sẽ được phản ánh trong phương trình được sử dụng để tính tọa độ x của điểm D.
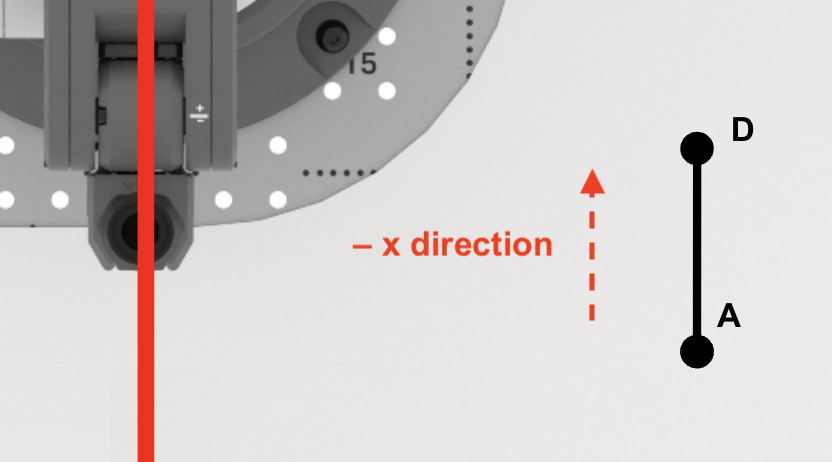
Tìm tọa độ x của điểm D.
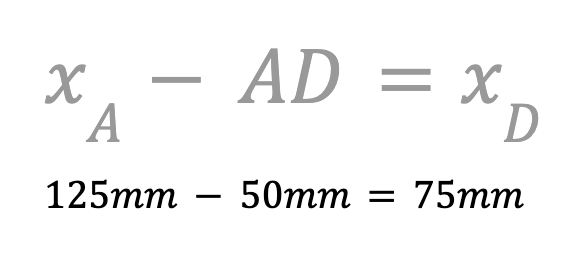
Vì cánh tay 6 trục sẽ di chuyển theo hướng âm dọc theo trục x nên bạn cần sử dụng phép trừ. Trừ độ dài AD khỏi tọa độ x của điểm A để tìm tọa độ x của điểm D.
Tọa độ x của điểm D là 75mm. Ghi lại điều này vào sổ tay kỹ thuật của bạn.
Tiếp theo, chúng ta sẽ tìm tọa độ y của điểm D.
Vì các điểm A, B và D nằm trên đường thẳng y = 125mm nên tọa độ y của điểm D giống với tọa độ y của các điểm A và B (125mm). Ghi lại điều này vào sổ tay kỹ thuật của bạn.
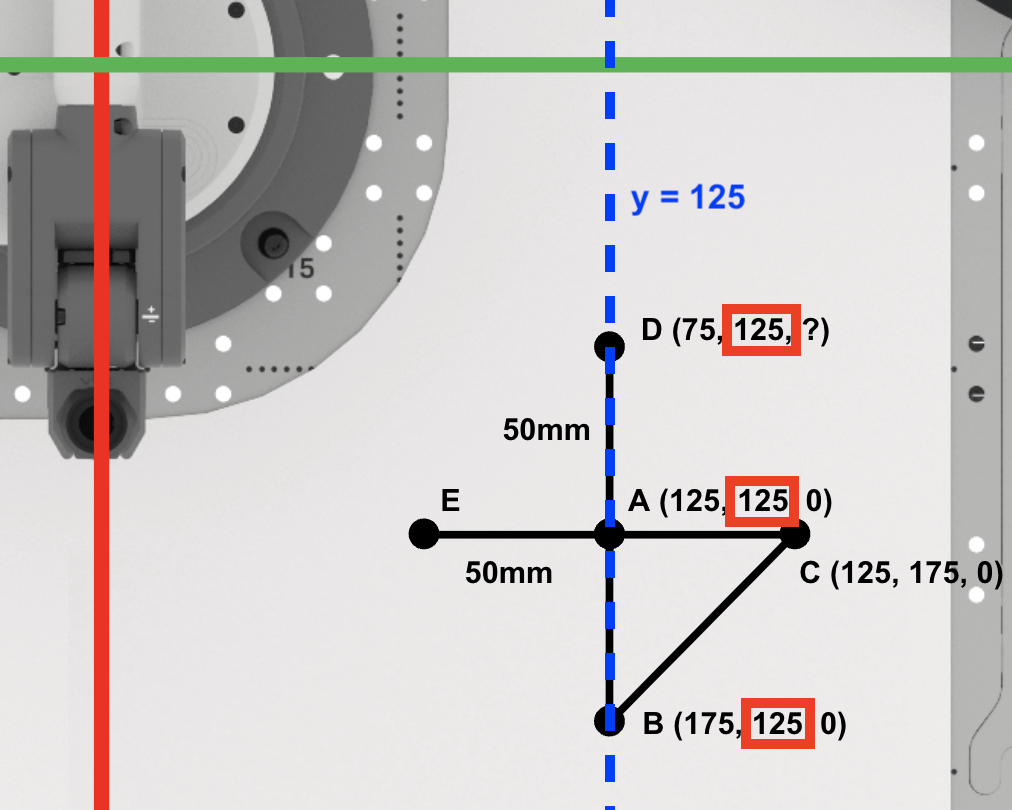
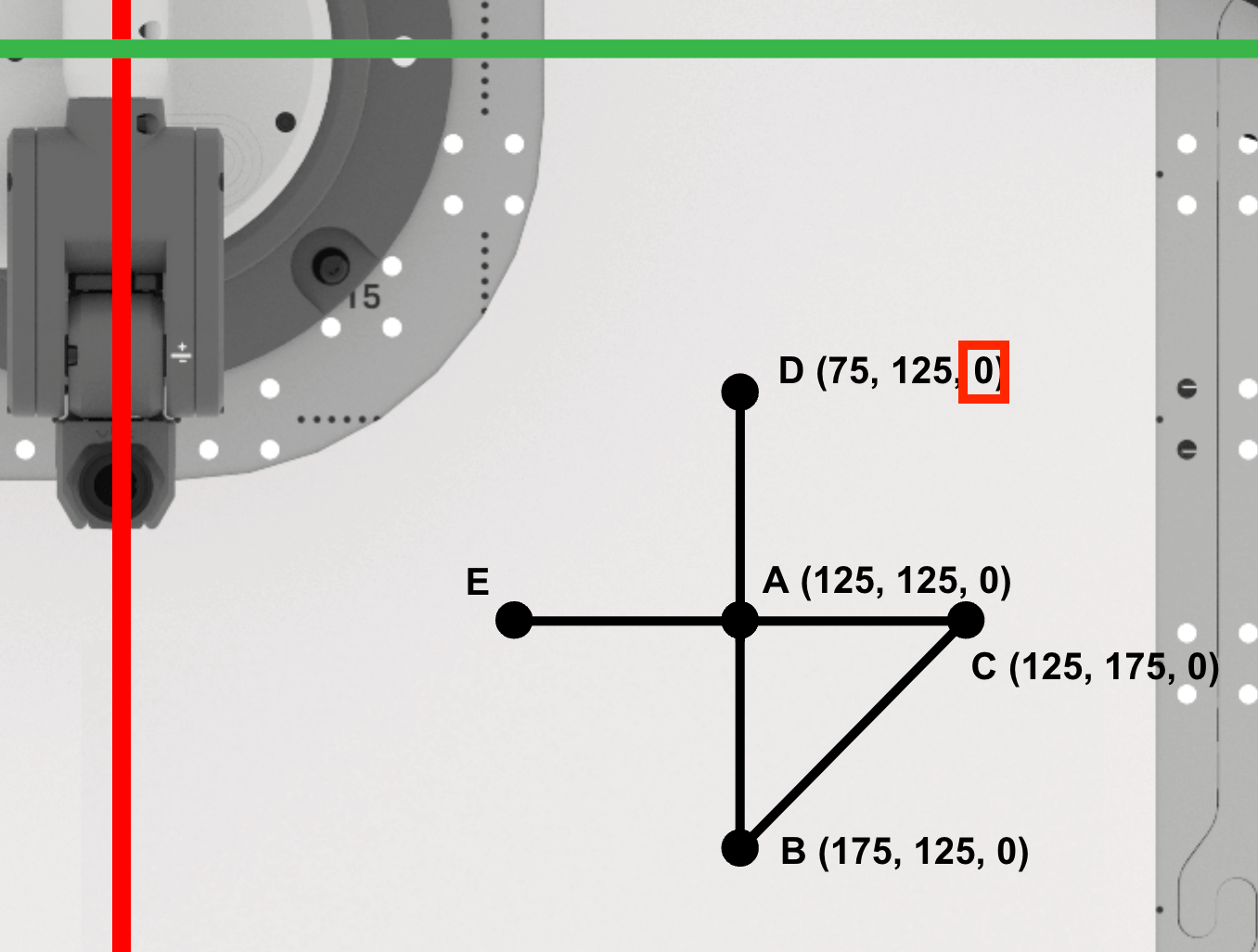
Vì Bút không nâng lên giữa điểm A và D nên tọa độ z của điểm D sẽ vẫn bằng 0.
Điểm D là (75, 125, 0). Ghi lại điều này vào sổ tay kỹ thuật của bạn.
Tìm điểm E
Tìm tọa độ x của điểm E.
Vì các điểm A, C và E nằm trên đường thẳng x=125mm nên giá trị x của điểm E giống với giá trị x của các điểm A và C (125mm).
Ghi lại điều này vào sổ tay kỹ thuật của bạn.
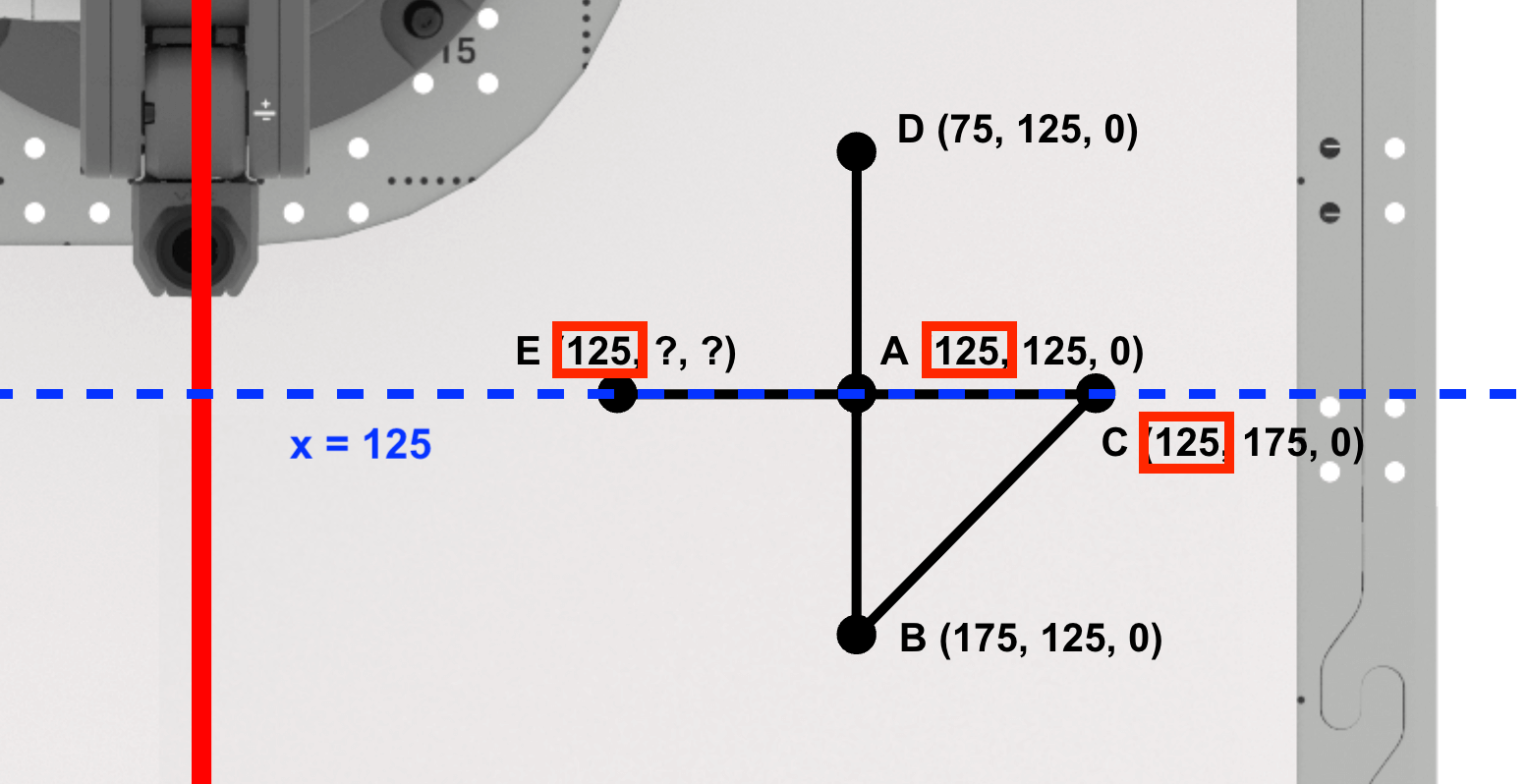
Cạnh AE của tam giác vuông ADE song song với trục y.
Lưu ý rằng nếu bạn di chuyển từ điểm A đến điểm E dọc theo trục y, tọa độ y sẽ có giá trị từđến. Điều này sẽ được phản ánh trong phương trình được sử dụng để tính tọa độ y của điểm E.

Tiếp theo, tìm tọa độ y của điểm E.
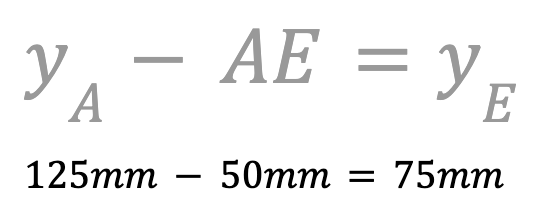
Vì Cánh tay 6 trục sẽ di chuyển theo hướng âm dọc theo trục y nên bạn cần sử dụng phép trừ. Trừ độ dài AE khỏi tọa độ y của điểm A để tìm tọa độ y của điểm E.
Tọa độ y của điểm E là 75mm. Ghi lại điều này vào sổ tay kỹ thuật của bạn.
Vì Bút không nâng lên giữa điểm D và E nên tọa độ z của điểm E sẽ vẫn bằng 0.
Điểm E là (125, 75, 0). Ghi lại điều này vào sổ tay kỹ thuật của bạn.
Mã hóa cánh tay 6 trục để vẽ tam giác ADE
Bây giờ bạn đã xác định được tọa độ cho các điểm D và E, đã đến lúc tạo một dự án VEXcode EXP cho Cánh tay 6 trục để kết nối các điểm A, D và E nhằm vẽ một hình tam giác khác.
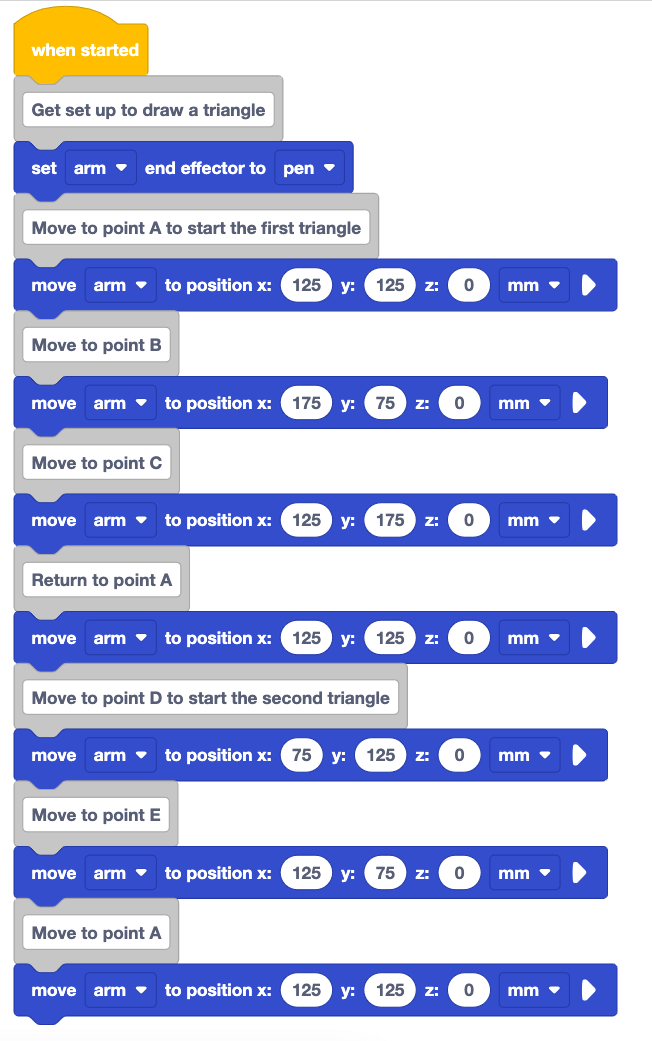
Mở dự án Bài 3 Đơn vị 5 để vẽ hình tam giác ABC trên Bảng trắng hoặc tạo lại dự án như minh họa ở đây.

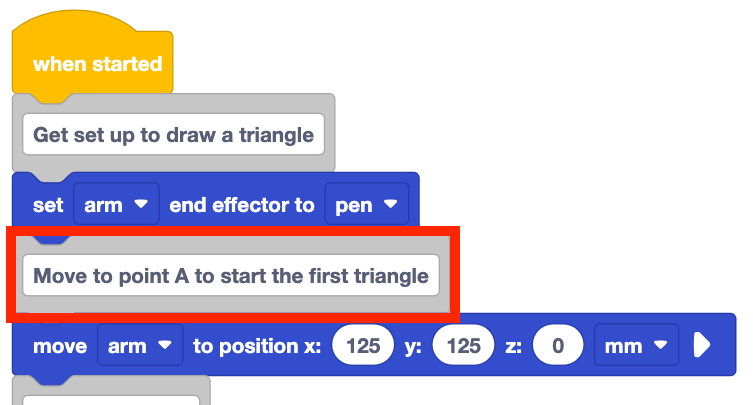
Thay đổi khối Bình luận hiển thị ở đây thành "Di chuyển đến điểm A để bắt đầu hình tam giác đầu tiên".
Vì bạn đang vẽ hai hình tam giác nên có thể thay đổi bình luận để cung cấp bối cảnh về các khối trong dự án được sử dụng để vẽ hình tam giác đầu tiên so với hình tam giác thứ hai.
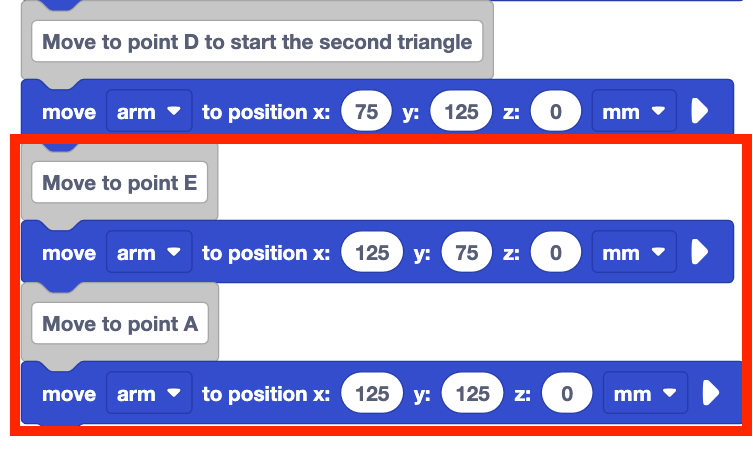
Thêm khối Bình luận vào cuối ngăn xếp và nhập "Di chuyển đến điểm D để bắt đầu hình tam giác thứ hai".

Thêm khối Di chuyển đến vị trí vào ngăn xếp bên dưới khối Bình luận.
Đặt các tham số của khối Di chuyển đến vị trí để chỉ tọa độ của điểm D, được ghi lại trong sổ tay kỹ thuật của bạn.

Thêm Bình luậnkhối và Di chuyển đến vị trí khối cho điểm E và quay lại điểm A để hoàn thành hình tam giác thứ hai.
Đặt các tham số của khối Di chuyển đến vị trí theo tọa độ của các điểm E và A đã được ghi vào sổ tay kỹ thuật của bạn.
Hãy đổi tên và lưu dự án vào thiết bị của bạn.
Toàn bộ dự án của bạn sẽ trông như thế này khi hoàn thành.
Khi bạn hoàn tất việc xây dựng dự án, hãy đảm bảo rằng Tay 6 trục được kết nối với VEXcode EXP và chạy dự án.
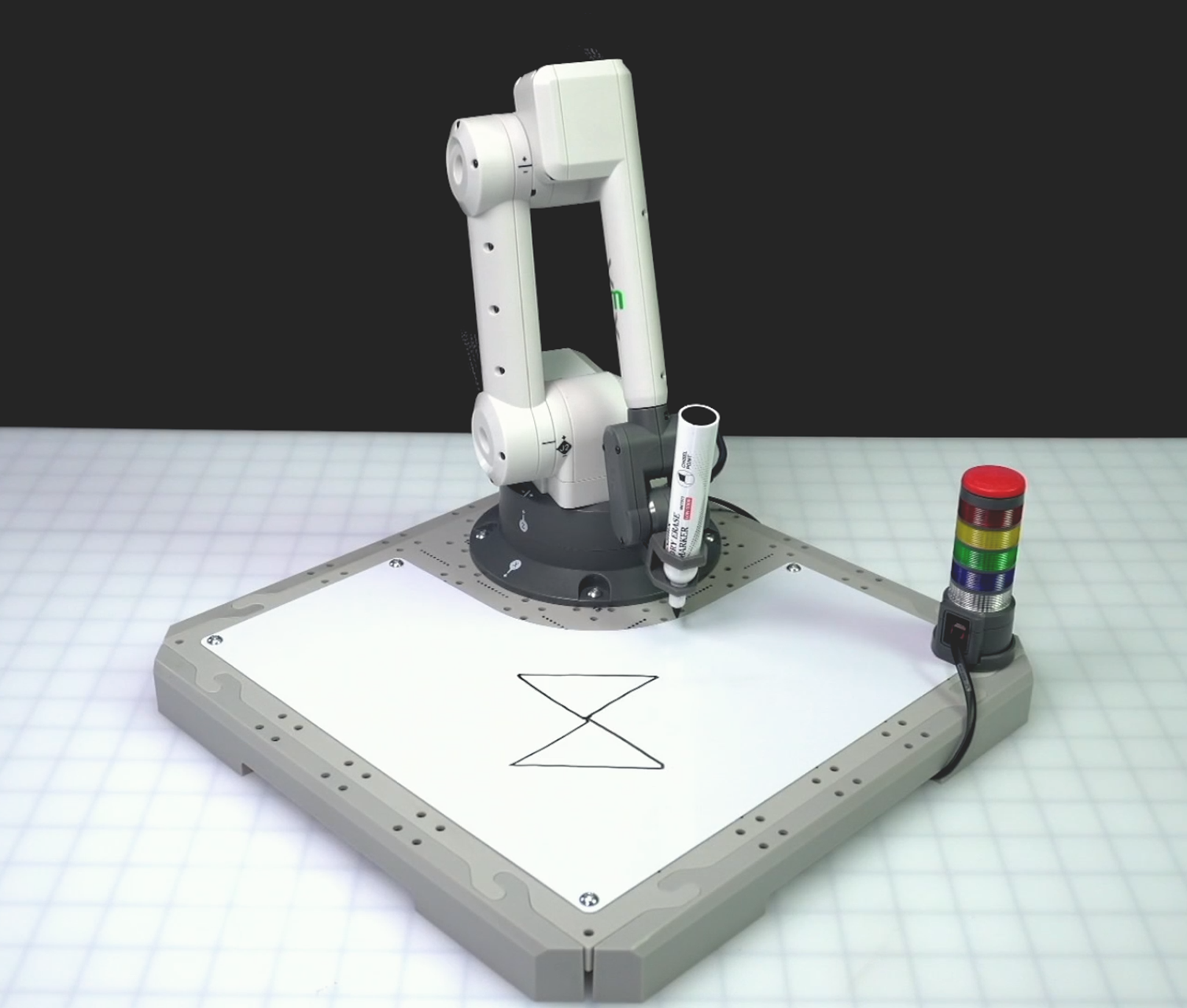
Dừng dự án khi Cánh tay 6 trục đã vẽ xong hai hình tam giác.
Cánh tay 6 trục sẽ vẽ tam giác ABC như đã làm ở Bài 3. Sau đó, nó sẽ di chuyển đến điểm D để vẽ cạnh đầu tiên của tam giác ADE. Sau đó, cánh tay 6 trục sẽ di chuyển từ điểm D đến điểm E để hoàn thành cạnh thứ hai của tam giác ADE và sẽ hoàn thành tam giác bằng cách di chuyển gói đến điểm A.
Lưu ý:Hình ảnh này cho thấy Cánh tay 6 trục đã được di chuyển thủ công sau khi dự án dừng lại để có thể nhìn thấy rõ cả hai hình tam giác.
Hoạt động
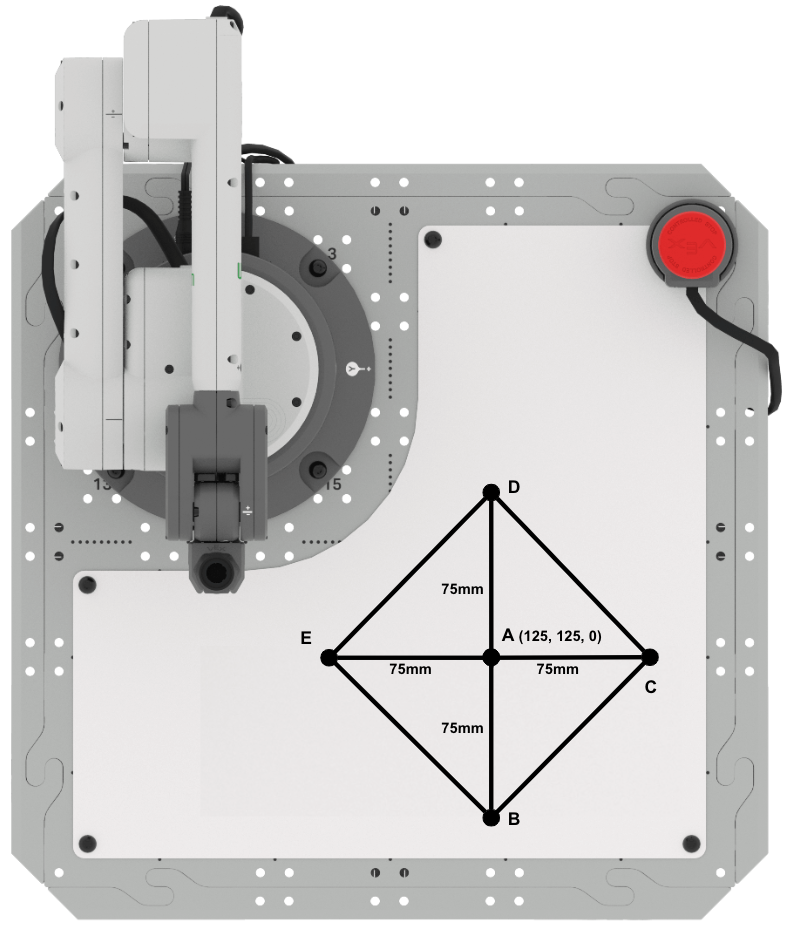
Trong bài học này, bạn đã học cách vẽ các hình tam giác có các cạnh cần di chuyển theo hướng âm dọc theo các trục. Bây giờ bạn sẽ áp dụng những kiến thức đã học để vẽ một hình thoi được tạo thành từ bốn hình tam giác.

- Thiết lập:Vẽ các điểm A, B, C, D và E vào sổ tay kỹ thuật của bạn như minh họa ở trên.
- Điểm A nằm ở (125, 125, 0)
- Độ dài các cạnh AB, AC, AD và AE là 75mm
- Hoạt động:
- Sử dụng các công thức từ Bài 3 và Bài 4 để xác định tọa độ của các điểm B, C, D và E ở trên. Ghi lại tọa độ vào sổ tay kỹ thuật của bạn.
- Tạo một dự án VEXcode EXP để kết nối các điểm và vẽ hình dạng hiển thị ở trên.
- Bạn có thể xây dựng dựa trên dự án Bài 4 hoặc xuống dự án Mẫu tháp tín hiệu.
- Hãy chắc chắn đặt khối Set end effector thành penđể bắt đầu.
- Sử dụng Bình luận để truyền đạt hành vi của Cánh tay 6 trục trong dự án của bạn.
- Khi bạn đã hoàn tất việc xây dựng dự án, hãy chạy dự án để kiểm tra.
- Dự án của bạn có vẽ hình kim cương như hình trên không? Nếu không, hãy tiếp tục sửa đổi dự án của bạn và thử nghiệm cho đến khi thành công.
- Sau khi hoàn thành dự án, hãy đổi tên và lưu dự án vào thiết bị của bạn.
Kiểm tra sự hiểu biết của bạn
Trước khi chuyển sang Bài học tiếp theo, hãy đảm bảo rằng bạn hiểu các khái niệm trong Bài học này bằng cách trả lời các câu hỏi trong tài liệu bên dưới trong sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi hiểu biết của bạn > (Google Doc / .docx / .pdf)
ChọnTiếp theo >để hoàn thành hoạt động Tổng hợp tất cả.