
ในบทเรียนก่อนหน้านี้ท่านได้เรียนรู้วิธีวาดสามเหลี่ยมผ่านการหาพิกัดที่หายไป ในบทเรียนนี้ท่านจะได้เรียนรู้ว่าจะทำอย่างไรเมื่อแขน 6 แกนเคลื่อนที่ไปตามแกน x หรือ y ในทิศทางลบและวิธีคำนวณพิกัดที่หายไป
ในตอนท้ายของบทเรียนนี้ท่านจะวาดเพชรโดยเชื่อมต่อพิกัดที่ท่านกำหนดไว้
การค้นหาพิกัดที่หายไป
ในบทที่ 3 คุณกำหนดพิกัดที่หายไปของสามเหลี่ยมโดยดูจากการรู้จุดหนึ่งของสามเหลี่ยมและความยาวสองด้าน ตอนนี้คุณจะสร้างโปรเจกต์นั้นเพื่อวาดสามเหลี่ยมอันที่สอง
การค้นหาจุด D
ร่างข้อมูลที่ทราบในสมุดบันทึกวิศวกรรมของคุณ
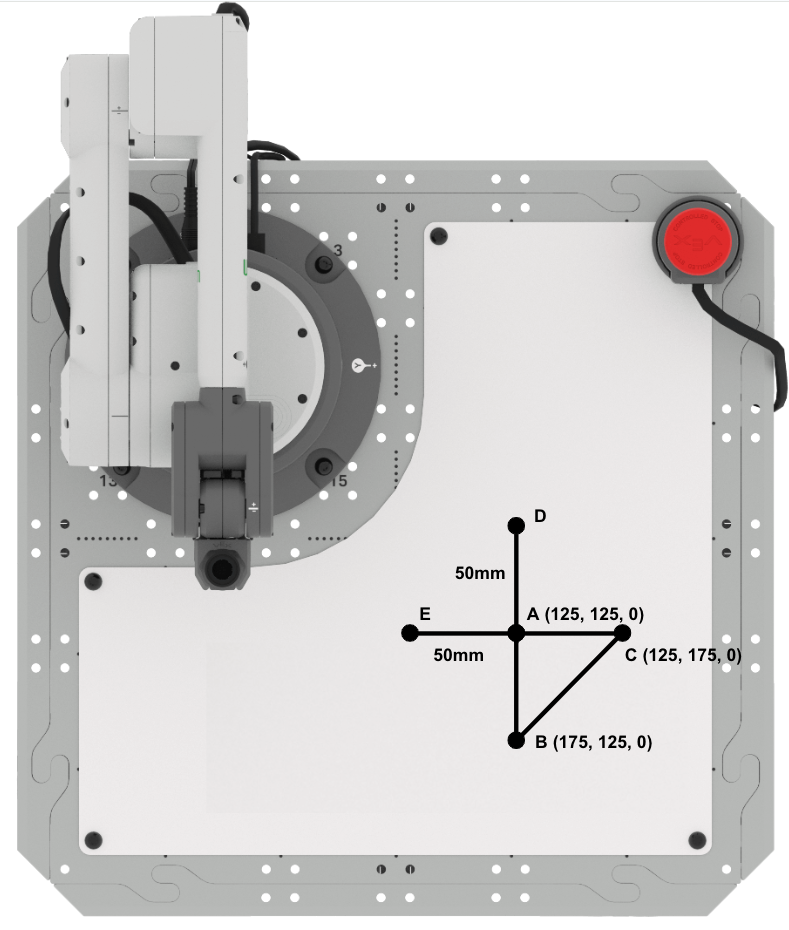
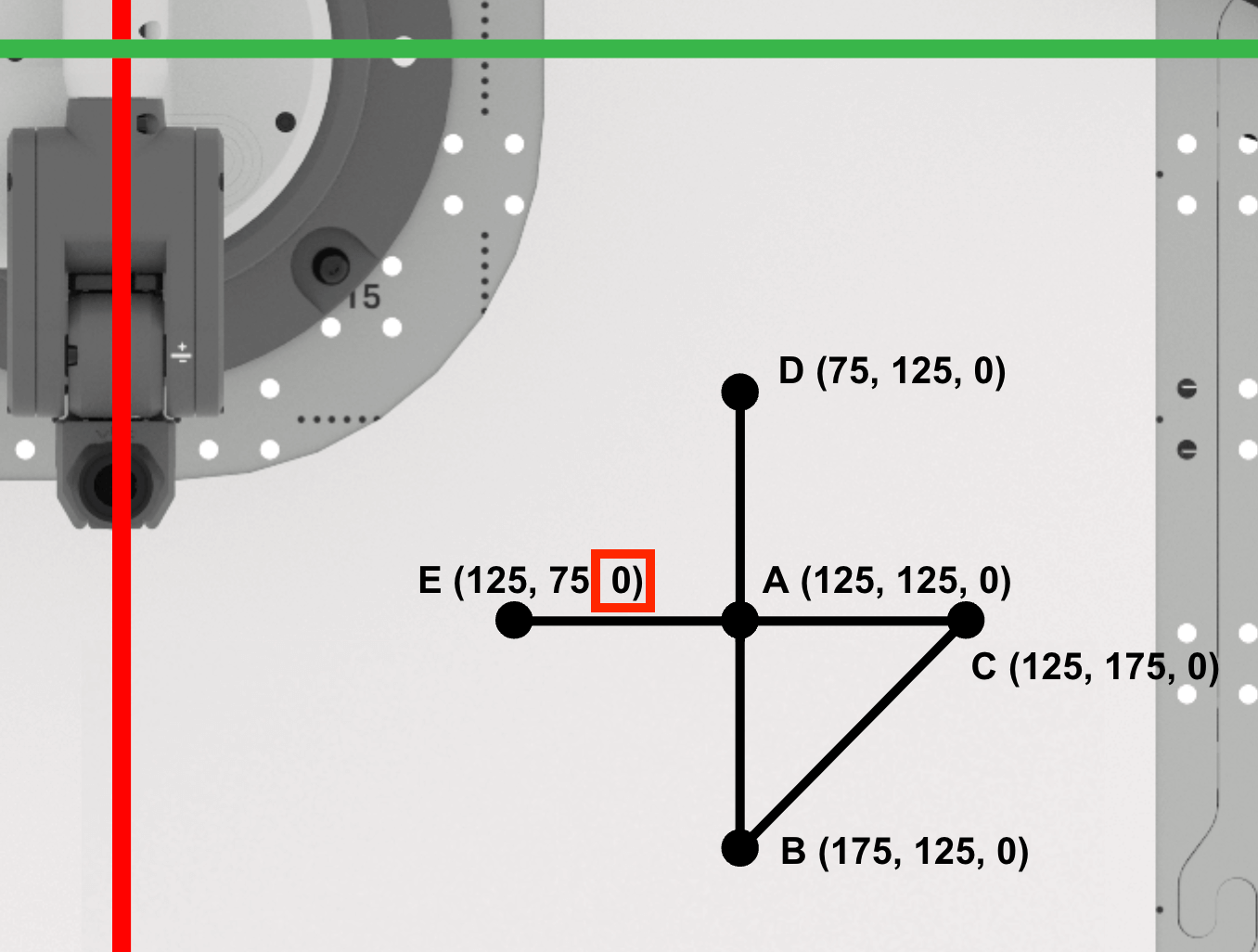
สามเหลี่ยม ABC ตั้งอยู่ที่จุด:
- A (125, 125, 0)
- B (175, 125, 0)
- C (125, 175, 0)
นี่คือสามเหลี่ยมที่ท่านวาดในบทเรียนที่ 3
สามเหลี่ยมที่สอง ADE มีความยาวด้านข้าง 50 มม. สำหรับด้าน AD และ AE ด้านข้างของรูปสามเหลี่ยม Ade จะแสดงในภาพนี้ด้วยเส้นสีน้ำเงินและข้อความ
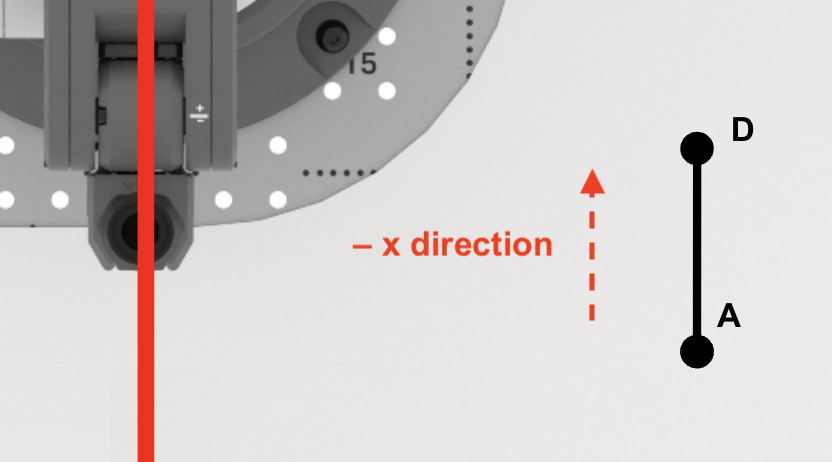
AD ด้านข้างของสามเหลี่ยมมุมฉาก ADE ขนานกับแกน x
โปรดทราบว่าเมื่อคุณย้ายจากจุด A ไปยังจุด D ตามแกน x พิกัด x จะ มีค่า ต่ำกว่า สิ่งนี้จะสะท้อนให้เห็นในสมการที่ใช้ในการคำนวณพิกัด x ของจุด D
หาพิกัด x ของจุด D
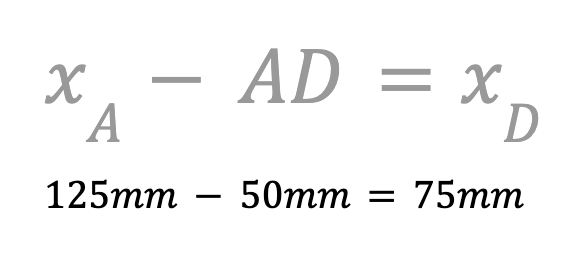
เนื่องจากแกนแขน 6 แกนจะเคลื่อนที่ไปในทิศทางลบตามแกน x คุณต้องใช้การลบ ลบความยาวของ AD จากพิกัด x ของจุด A เพื่อหาพิกัด x ของจุด D
พิกัด x ของจุด D คือ 75 มม. บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
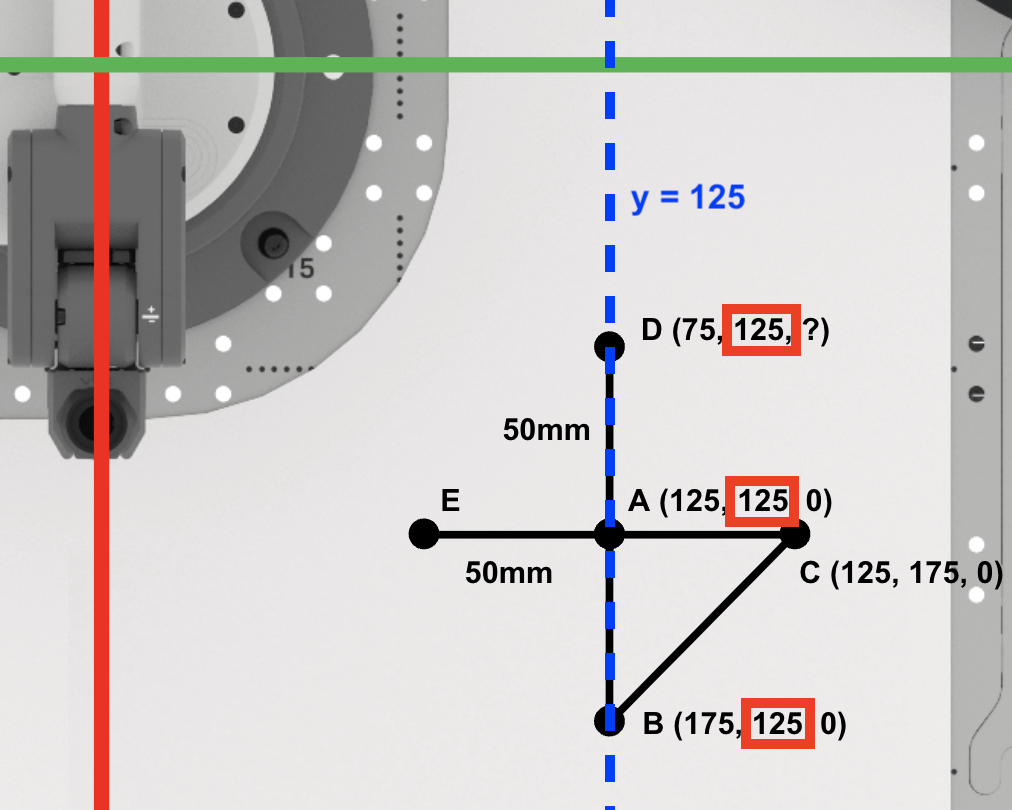
ต่อไปเราจะหาพิกัด y ของจุด D
เนื่องจากจุด A, B และ D อยู่ตามเส้น y = 125 มม. พิกัด y ของจุด D จึงเหมือนกับจุด A และ B (125 มม.) บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
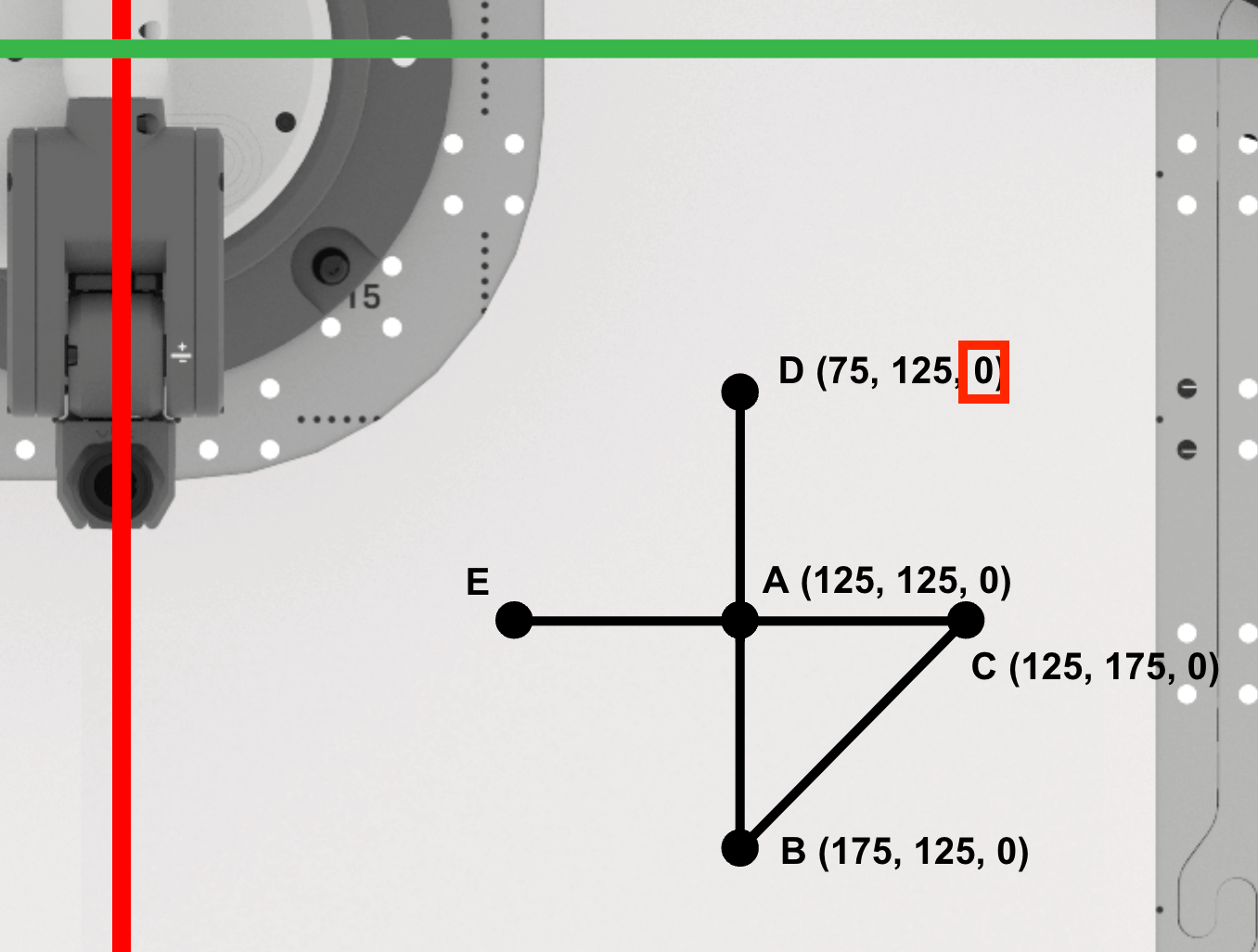
เนื่องจากปากกาไม่เพิ่มขึ้นระหว่างจุด A และ D พิกัด z ของจุด D จะยังคงเป็นศูนย์
จุด D คือ (75, 125, 0) บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
การค้นหาจุด E
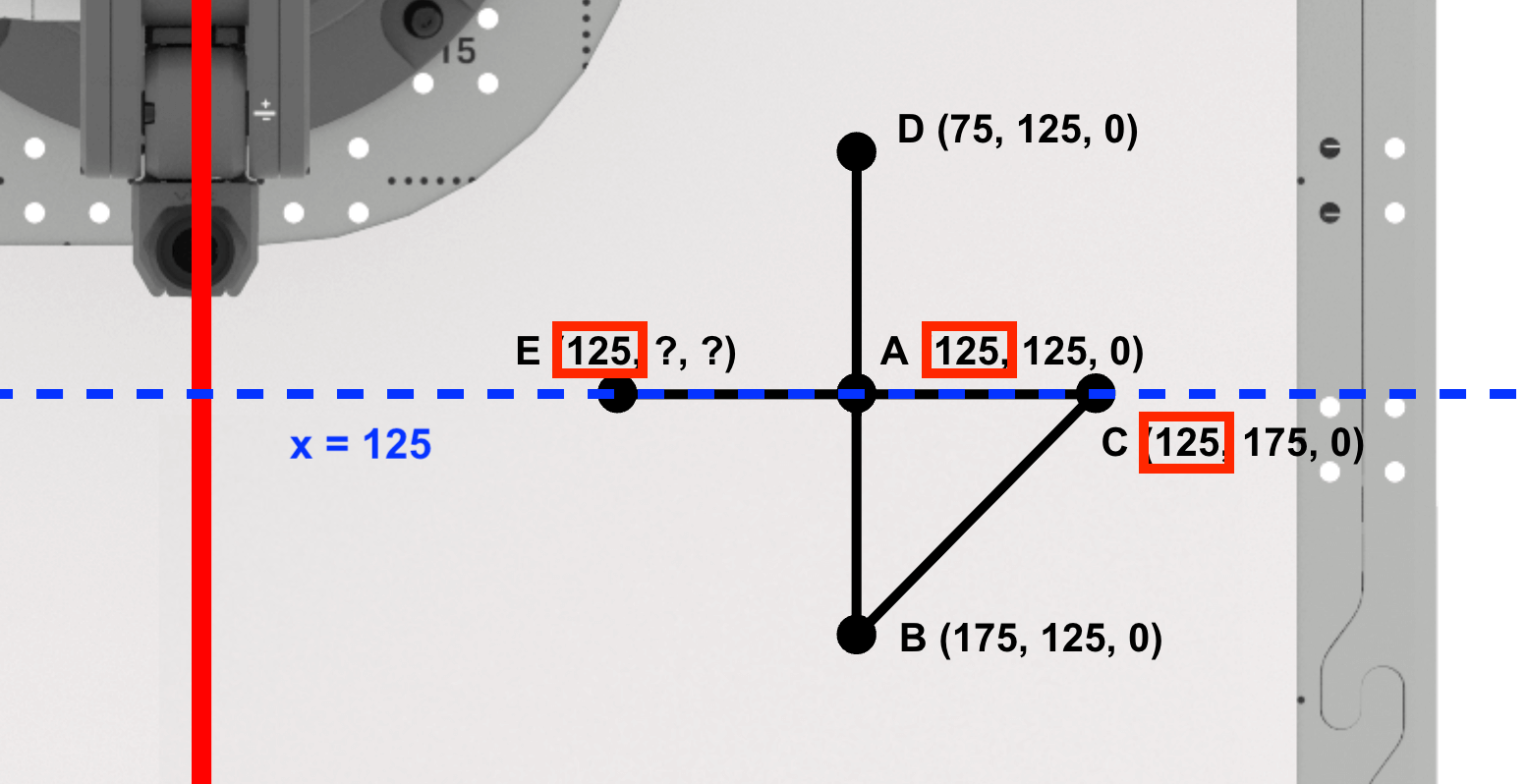
หาพิกัด x ของจุด E
เนื่องจากจุด A, C และ E อยู่ตามเส้น x = 125 มม. ค่า x ของจุด E จึงเท่ากับจุด A และ C (125 มม.)
บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ

AE ด้านข้างของสามเหลี่ยมมุมฉาก ADE ขนานกับแกน y
โปรดทราบว่าหากคุณย้ายจากจุด A ไปยังจุด E ตามแกน y พิกัด y จะ มีค่า ต่ำกว่า สิ่งนี้จะสะท้อนให้เห็นในสมการที่ใช้ในการคำนวณพิกัด y ของจุด E
จากนั้นหาพิกัด y ของจุด E
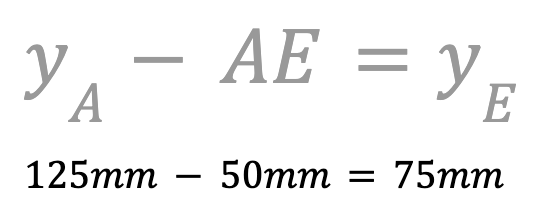
เนื่องจากแกนแขน 6 แกนจะเคลื่อนที่ไปในทิศทางลบตามแกน y คุณต้องใช้การลบ ลบความยาวของ AE จากพิกัด y ของจุด A เพื่อหาพิกัด y ของจุด E
พิกัด y ของจุด E คือ 75 มม. บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
เนื่องจากปากกาไม่เพิ่มขึ้นระหว่างจุด D และ E พิกัด z ของจุด E จะยังคงเป็นศูนย์
จุด E คือ (125, 75, 0) บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
การเข้ารหัสแขน 6 แกนเพื่อวาดสามเหลี่ยม ADE
ตอนนี้คุณได้กำหนดพิกัดสำหรับจุด D และ E แล้วถึงเวลาสร้างโครงการ VEXcode EXP สำหรับแขน 6 แกนเพื่อเชื่อมต่อจุด A, D และ E เพื่อวาดสามเหลี่ยมอีกอัน

เปิดโปรเจกต์หน่วยที่ 5 บทเรียนที่ 3 เพื่อวาดรูปสามเหลี่ยม ABC บนไวท์บอร์ดหรือสร้างโปรเจกต์ขึ้นมาใหม่ตามที่แสดงที่นี่
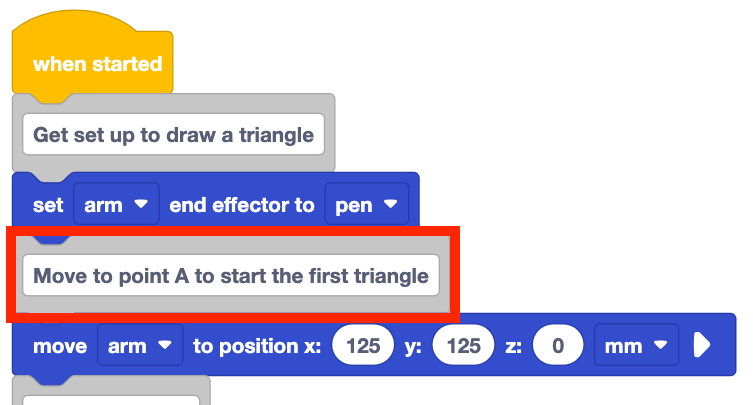
เปลี่ยน บล็อก ความคิดเห็นที่แสดงที่นี่เป็น "ย้ายไปยังจุด A เพื่อเริ่มสามเหลี่ยมแรก"
เนื่องจากคุณกำลังวาดรูปสามเหลี่ยมสองรูปคุณสามารถเปลี่ยนความคิดเห็นเพื่อให้บริบทว่าบล็อกใดในโครงการที่ใช้ในการวาดสามเหลี่ยมแรกเทียบกับสามเหลี่ยมที่สอง

เพิ่ม บล็อก ความคิดเห็นที่ด้านล่างของกองซ้อนและพิมพ์ว่า "ย้ายไปยังจุด D เพื่อเริ่มสามเหลี่ยมที่สอง"

เพิ่มการ ย้ายไปยัง บล็อกตำแหน่งไปยังกองซ้อนใต้ บล็อก ความคิดเห็น
ตั้งค่าการ ย้ายไปยังตำแหน่งพารามิเตอร์ของ บล็อกไปยังพิกัดของจุด D ที่บันทึกไว้ในสมุดบันทึกวิศวกรรมของคุณ
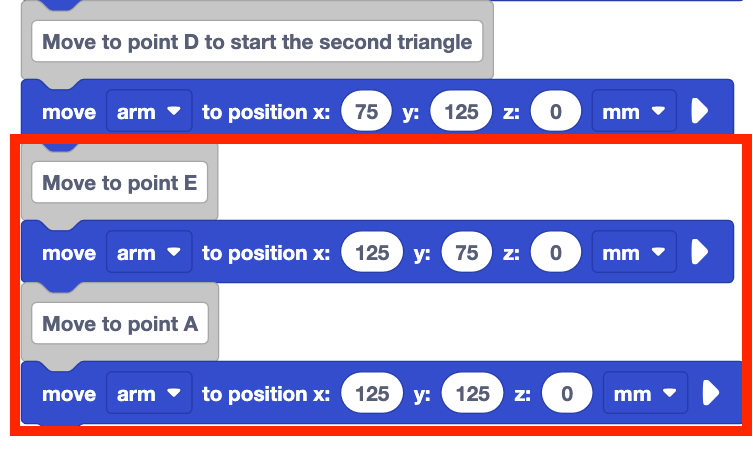
เพิ่ม บล็อก ความคิดเห็นและ ย้ายไปยังตำแหน่ง บล็อกสำหรับจุด E และกลับไปยังจุด A เพื่อทำสามเหลี่ยมที่สองให้เสร็จสมบูรณ์
ตั้งค่าพารามิเตอร์ของ ย้ายไปยังตำแหน่ง บล็อกไปยังพิกัดของจุด E และ A ที่บันทึกไว้ในสมุดบันทึกวิศวกรรมของคุณ
อย่าลืมเปลี่ยนชื่อและบันทึกโปรเจกต์ลงในอุปกรณ์ของคุณ
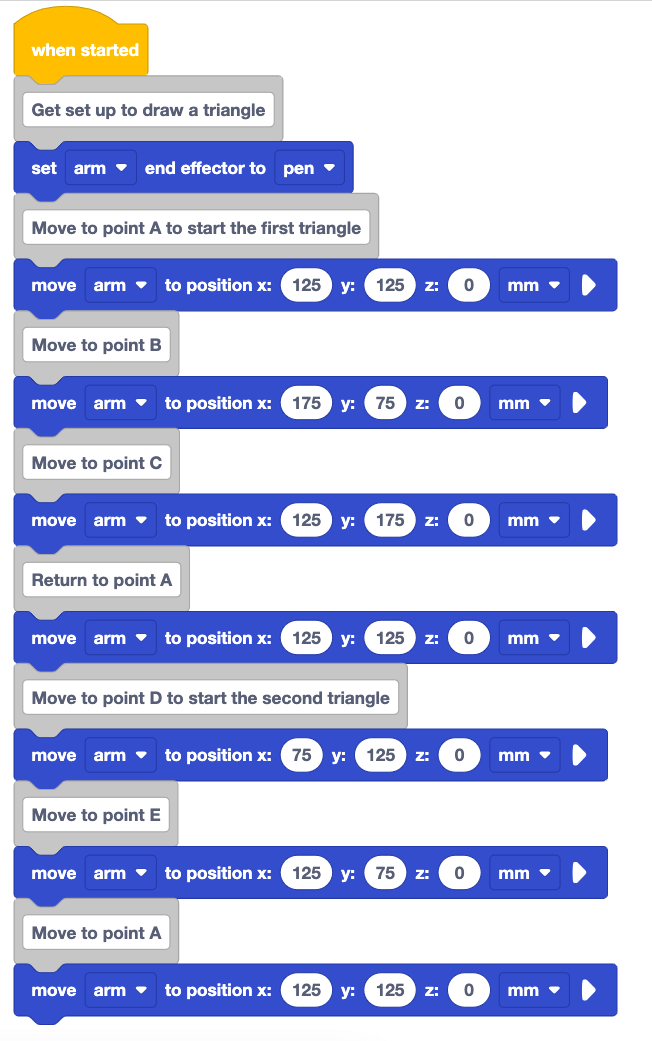
โปรเจกต์เต็มรูปแบบของคุณควรเป็นแบบนี้เมื่อเสร็จสิ้น
เมื่อคุณสร้างโปรเจกต์ของคุณเสร็จแล้วตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode EXP และเรียกใช้โปรเจกต์แล้ว
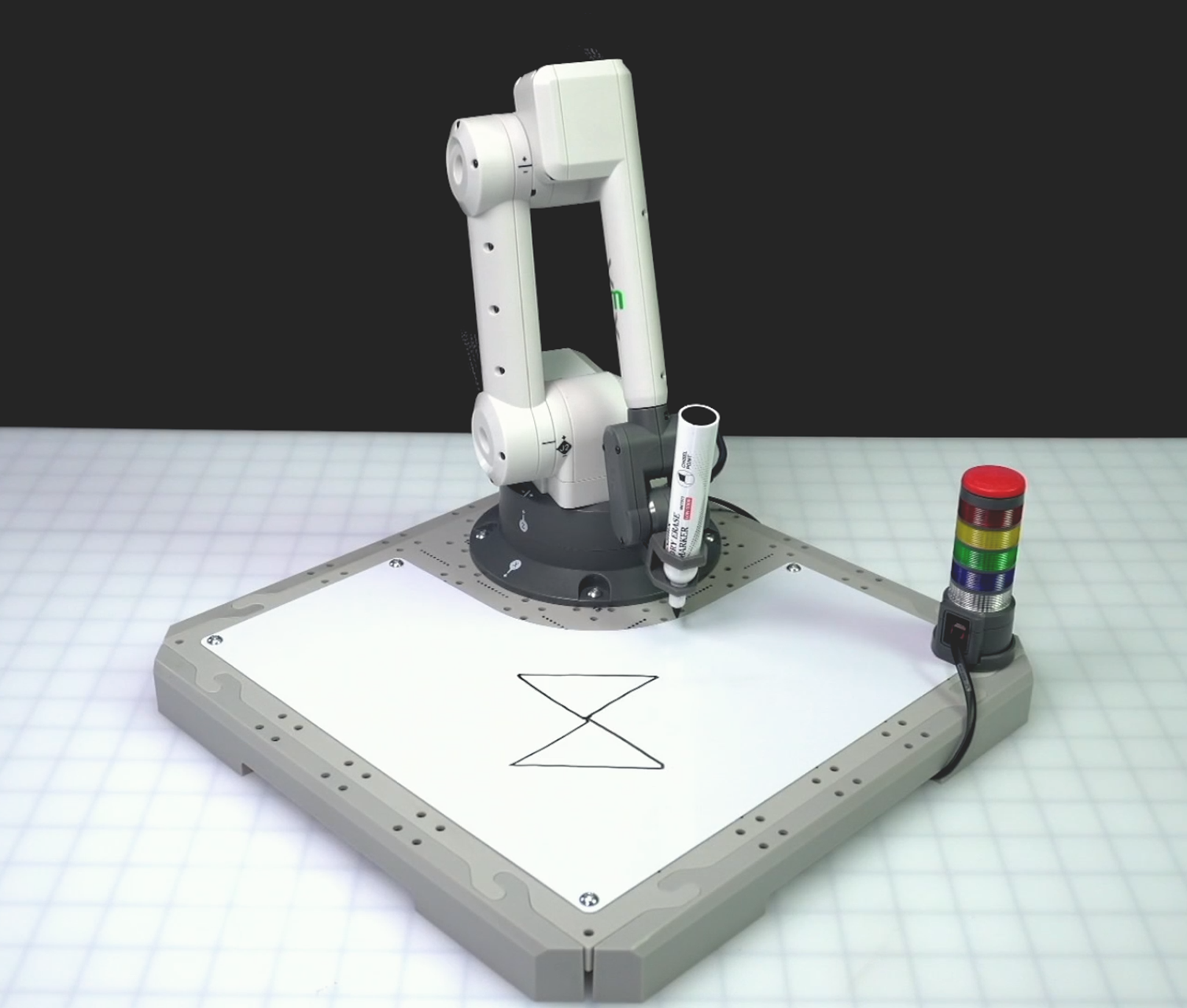
หยุดโครงการเมื่อแขน 6 แกนวาดรูปสามเหลี่ยมทั้งสองเสร็จแล้ว
แขน 6 แกนจะวาดสามเหลี่ยม ABC เหมือนในบทเรียนที่ 3 จากนั้นก็จะเลื่อนไปที่จุด D นะคะเพื่อวาดรูปสามเหลี่ยม Ade ด้านแรกนะคะ จากนั้นแขน 6 แกนจะย้ายจากจุด D ไปยังจุด E เพื่อให้ด้านที่สองของสามเหลี่ยม ADE เสร็จสมบูรณ์และจะจบสามเหลี่ยมโดยการย้ายแพ็คไปยังจุด A
หมายเหตุ: ภาพ นี้แสดงให้เห็นว่าแขน 6 แกนได้รับการเคลื่อนย้ายด้วยตนเองหลังจากหยุดโครงการเพื่อให้สามารถมองเห็นสามเหลี่ยมทั้งสองได้อย่างชัดเจน
กิจกรรม
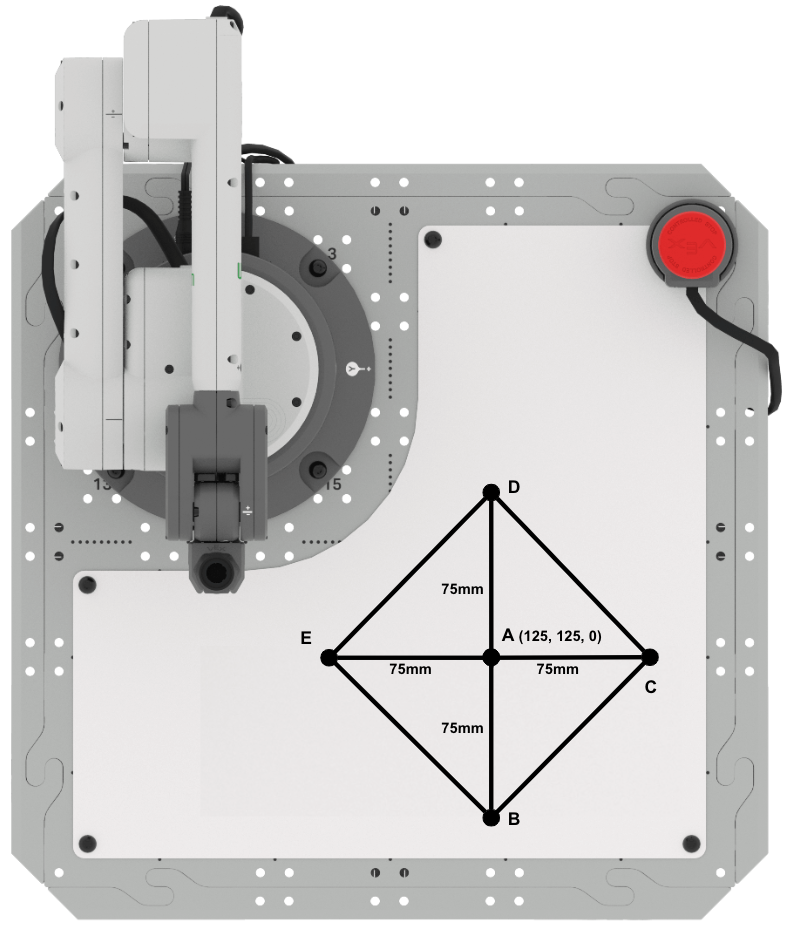
ในบทเรียนนี้ท่านได้เรียนรู้วิธีวาดรูปสามเหลี่ยมด้วยด้านที่ต้องเคลื่อนที่ไปในทิศทางลบตามแนวแกน ตอนนี้คุณจะใช้การเรียนรู้ของคุณในการวาดเพชรซึ่งประกอบด้วยรูปสามเหลี่ยมสี่รูป

- การตั้งค่า: วาดจุด A, B, C, D และ E
ในสมุดบันทึกวิศวกรรมของคุณตามที่แสดงไว้ด้านบน
- จุด A อยู่ที่ (125, 125, 0)
- ความยาวด้านข้าง AB, AC, AD และ AE คือ 75 มม.
- กิจกรรม:
- ใช้สูตรจากบทเรียนที่ 3 และ 4 เพื่อหาพิกัดของจุด B, C, D และ E ข้างต้น บันทึกพิกัดลงในสมุดบันทึกวิศวกรรมของคุณ
- สร้างโครงการ VEXcode EXP เพื่อเชื่อมต่อจุดและวาดรูปร่างที่แสดงด้านบน
- คุณสามารถสร้างโปรเจกต์บทที่ 4 หรือ ดาวน์โหลดโปรเจกต์เทมเพลตทาวเวอร์สัญญาณ
- อย่าลืมตั้งค่า บล็อกเอฟเฟคเต อร์ตั้ง ค่าเป็น ปากกา เพื่อเริ่มต้นใช้งาน
- ใช้ข้อคิดเห็นเพื่อสื่อสาร พฤติกรรมของแขน 6 แกนในโปรเจกต์ของคุณ
- เมื่อคุณสร้างโปรเจกต์ของคุณเสร็จแล้วให้เรียกใช้โปรเจกต์เพื่อทดสอบ
- โปรเจกต์ของคุณวาดเพชร ตามที่แสดงข้างต้นหรือไม่? หากไม่ใช่ให้แก้ไขโครงการของคุณต่อไปและทดสอบจนกว่าคุณจะประสบความสำเร็จ
- หลังจากที่คุณทำโปรเจกต์เสร็จแล้วให้เปลี่ยนชื่อและบันทึกโปรเจกต์ลงในอุปกรณ์ของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะย้ายไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อทำกิจกรรม Putting It All Together