
Ders 4: Elmas Çizimi
Önceki Derslerde, eksik koordinatları bularak üçgen çizmeyi öğrendiniz. Bu Ders'te, 6 Eksenli Kolun x veya y ekseni boyunca negatif yönde hareket etmesi durumunda ne yapacağınızı ve eksik koordinatların nasıl hesaplanacağını öğreneceksiniz.
Bu Dersin sonunda belirlediğiniz koordinatları birleştirerek bir elmas çizeceksiniz.
Eksik Koordinatları Bulma
3. Derste üçgenin bir noktasını ve iki kenar uzunluğunu bildiğinize dayanarak üçgenin eksik koordinatlarını belirlediniz. Şimdi bu projeyi devam ettirerek ikinci üçgeni çizeceksiniz.
D Noktasını Bulma
Bilinen bilgileri mühendislik defterinize yazın.
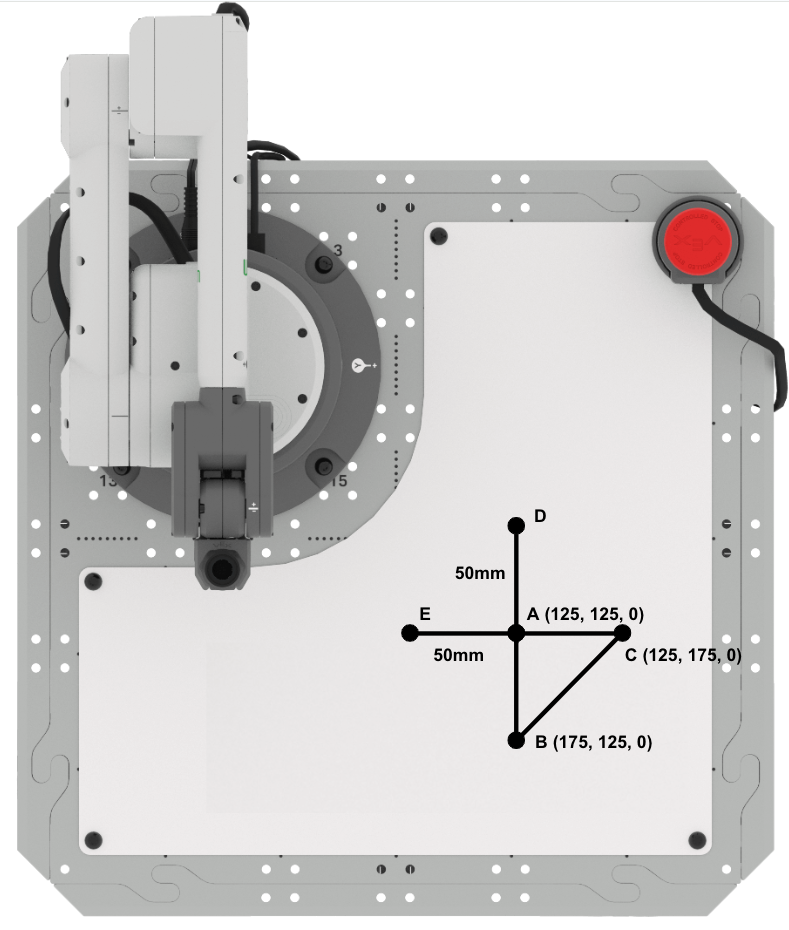
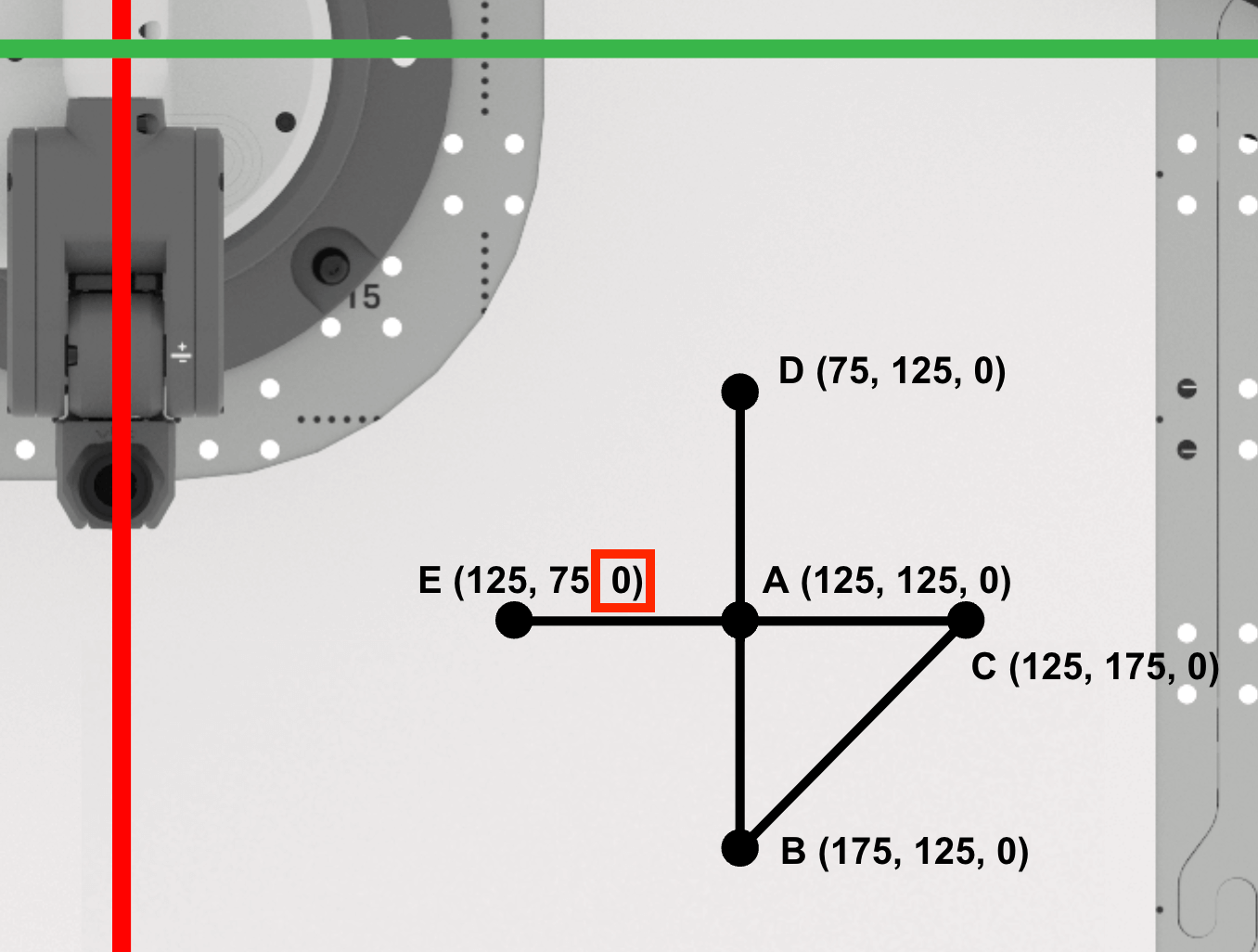
ABC üçgeni şu noktalarda bulunur:
- Bir (125, 125, 0)
- B (175, 125, 0)
- C (125, 175, 0)
Bu, 3. Ders'te çizdiğiniz üçgendi.
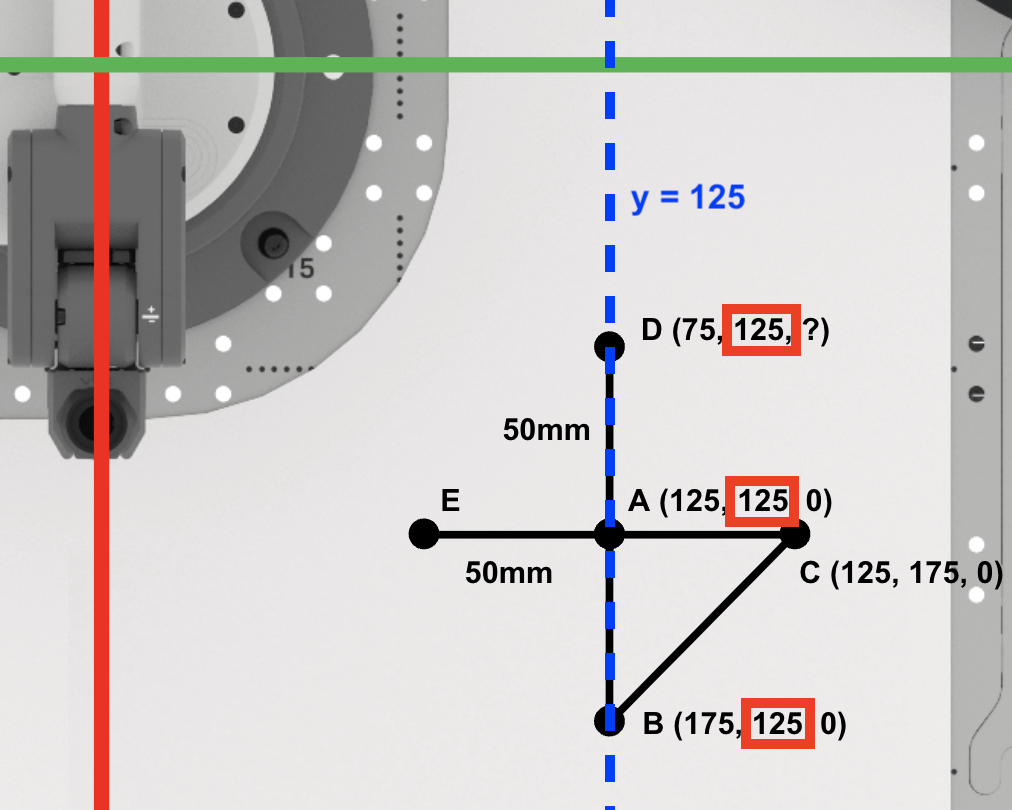
İkinci üçgen olan ADE'nin kenar uzunlukları AD ve AE olmak üzere 50 mm'dir. Bu görselde ADE üçgeninin kenarları mavi çizgiler ve yazı ile gösterilmiştir.
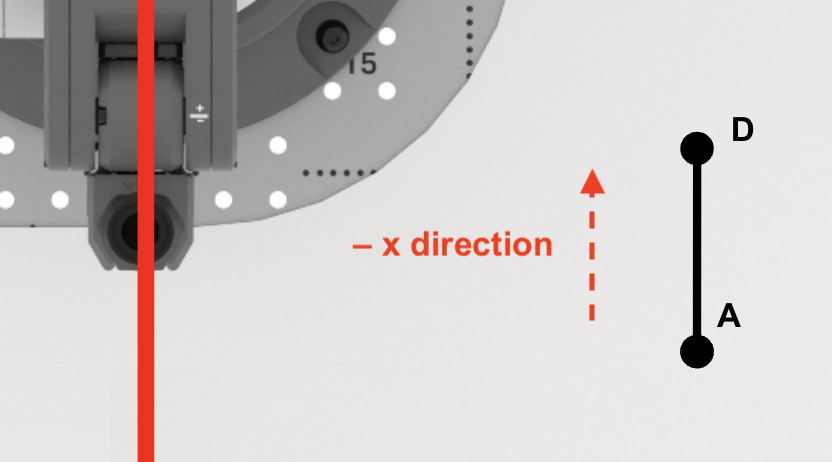
ADE dik üçgeninin AD kenarı x eksenine paraleldir.
X ekseninde A noktasından D noktasına doğru hareket ettikçe x koordinatlarının değerinin unutmayın. Bu durum, D noktasının x-koordinatının hesaplanmasında kullanılan denklemde yansıtılacaktır.
D noktasının x-koordinatını bulunuz.
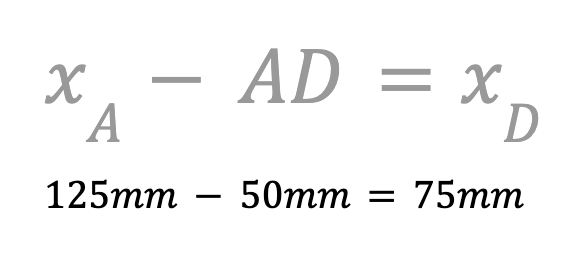
6 Eksenli Kol x ekseni boyunca negatif yönde hareket edeceğinden çıkarma işlemini kullanmanız gerekir. A noktasının x-koordinatından AD'nin uzunluğunu çıkararak D noktasının x-koordinatını buluruz.
D noktasının x-koordinatı 75mm'dir. Bunu mühendislik not defterinize kaydedin.
Daha sonra D noktasının y-koordinatını bulacağız.
A, B ve D noktaları y=125mm doğrusu üzerinde olduğundan D noktasının y koordinatı A ve B noktalarının y koordinatına eşittir (125mm). Bunu mühendislik not defterinize kaydedin.
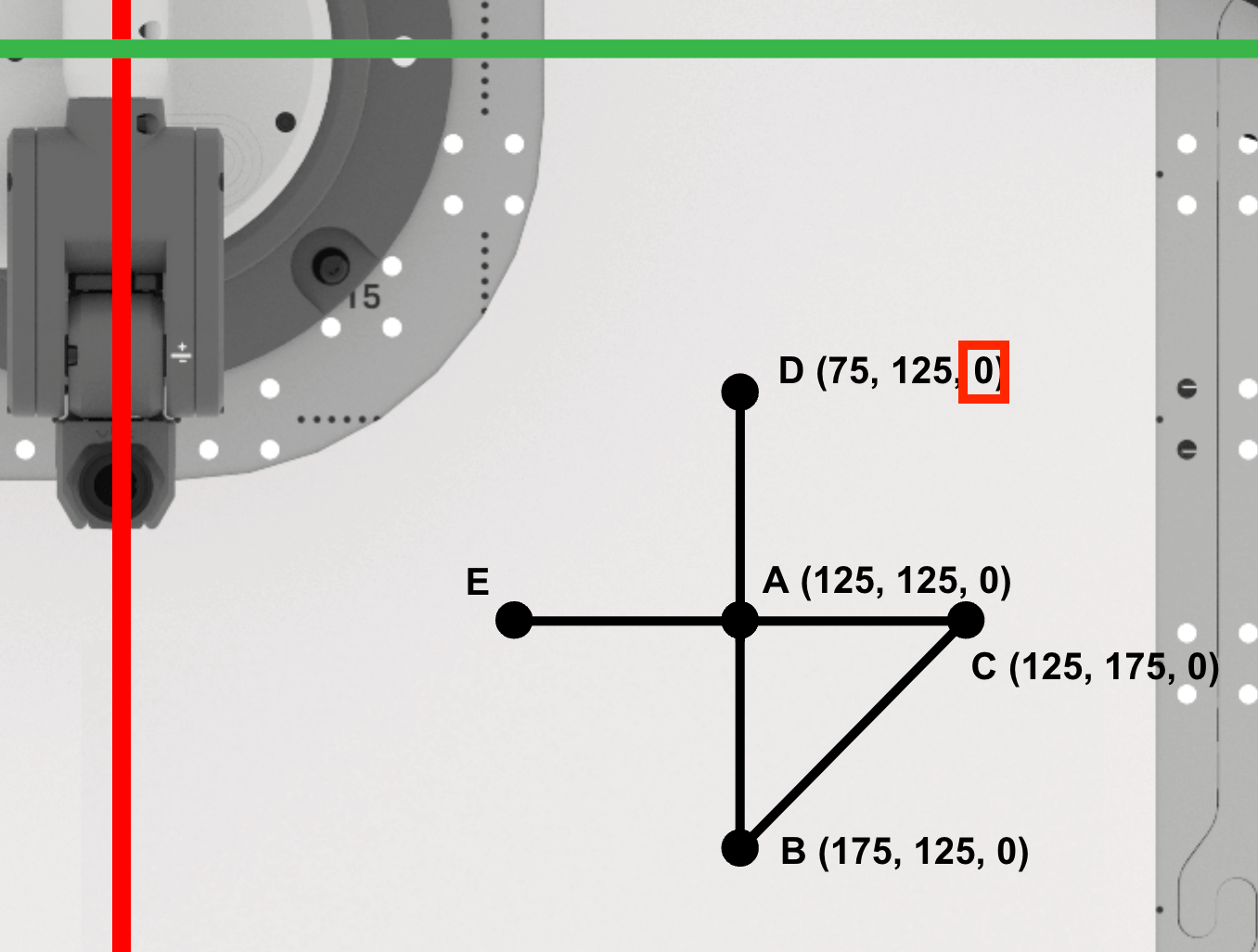
Kalem A ve D noktaları arasında yükselmediğinden D noktasının z-koordinatı sıfır kalacaktır.
D noktası (75, 125, 0)'dır. Bunu mühendislik not defterinize kaydedin.
E Noktasını Bulma
E noktasının x-koordinatını bulunuz.
A, C ve E noktaları x=125mm doğrusu üzerinde olduğundan, E noktasının x değeri A ve C noktalarının x değeriyle aynıdır (125mm).
Bunu mühendislik not defterinize kaydedin.
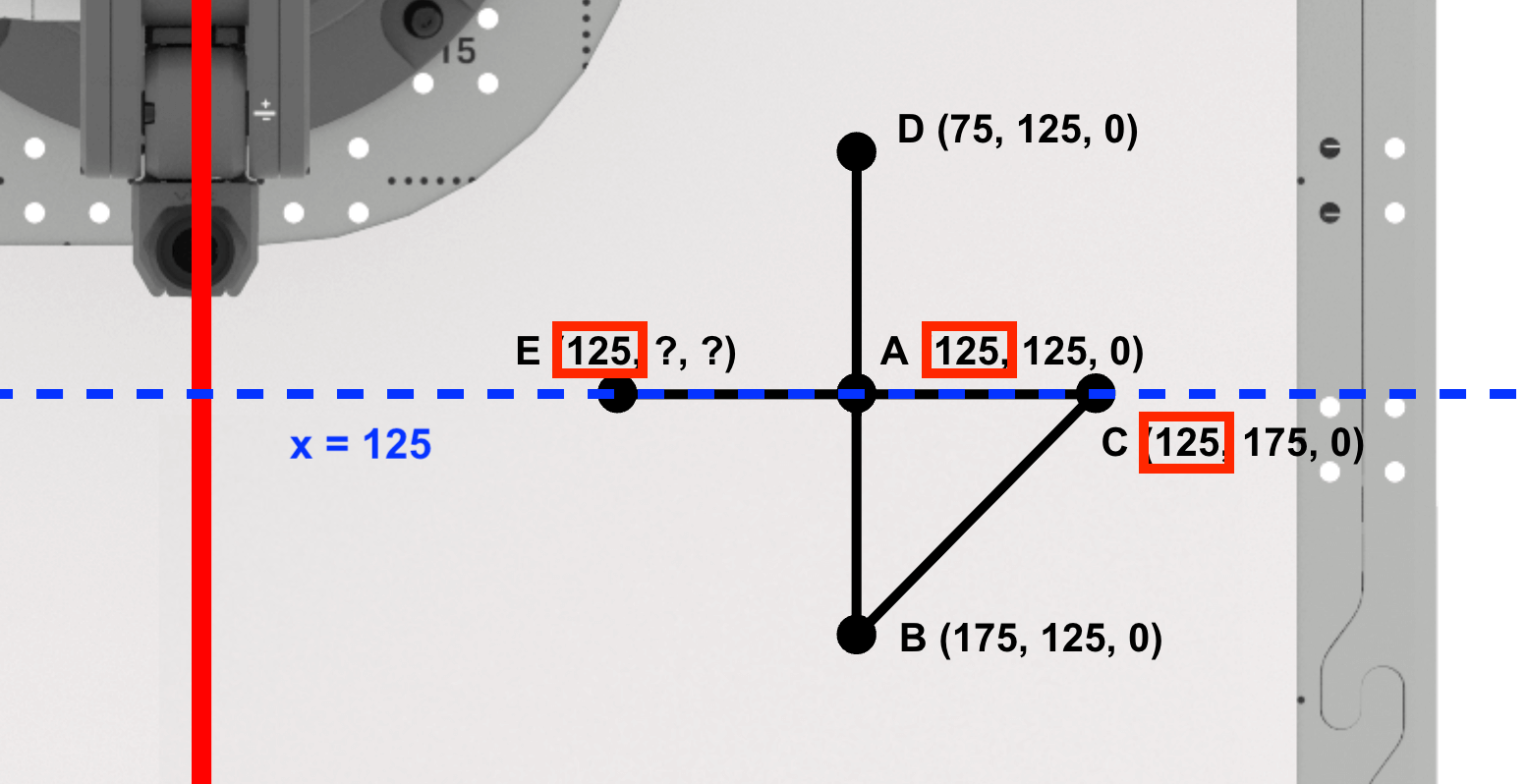
ADE dik üçgeninin AE kenarı y eksenine paraleldir.
Y ekseninde A noktasından E noktasına doğru hareket ettiğinizde y koordinatlarının düşeceğini unutmayın. Bu, E noktasının y-koordinatının hesaplanmasında kullanılan denklemde yansıtılacaktır.

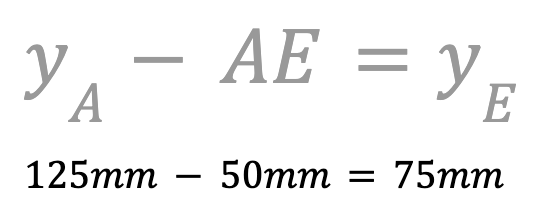
Daha sonra E noktasının y-koordinatını bulun.
6 Eksenli Kol y ekseni boyunca negatif yönde hareket edeceğinden çıkarma işlemini kullanmanız gerekir. A noktasının y-koordinatından AE'nin uzunluğunu çıkararak E noktasının y-koordinatını buluruz.
E noktasının y-koordinatı 75mm'dir. Bunu mühendislik not defterinize kaydedin.
Kalem D ve E noktaları arasında yükselmediğinden, E noktasının z-koordinatı sıfır kalacaktır.
E noktası (125, 75, 0)'dır. Bunu mühendislik not defterinize kaydedin.
Üçgen Çizmek İçin 6 Eksenli Kolu Kodlama ADE
Artık D ve E noktalarının koordinatlarını belirlediğinize göre, A, D ve E noktalarını birleştirerek başka bir üçgen çizmek için 6 Eksenli Kol için bir VEXcode EXP projesi oluşturmanın zamanı geldi.
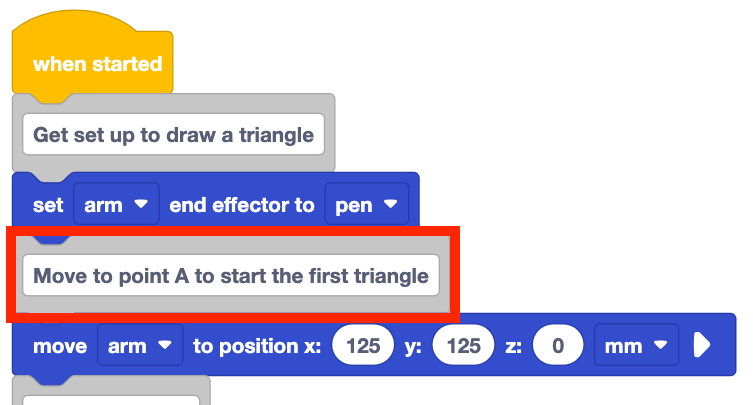
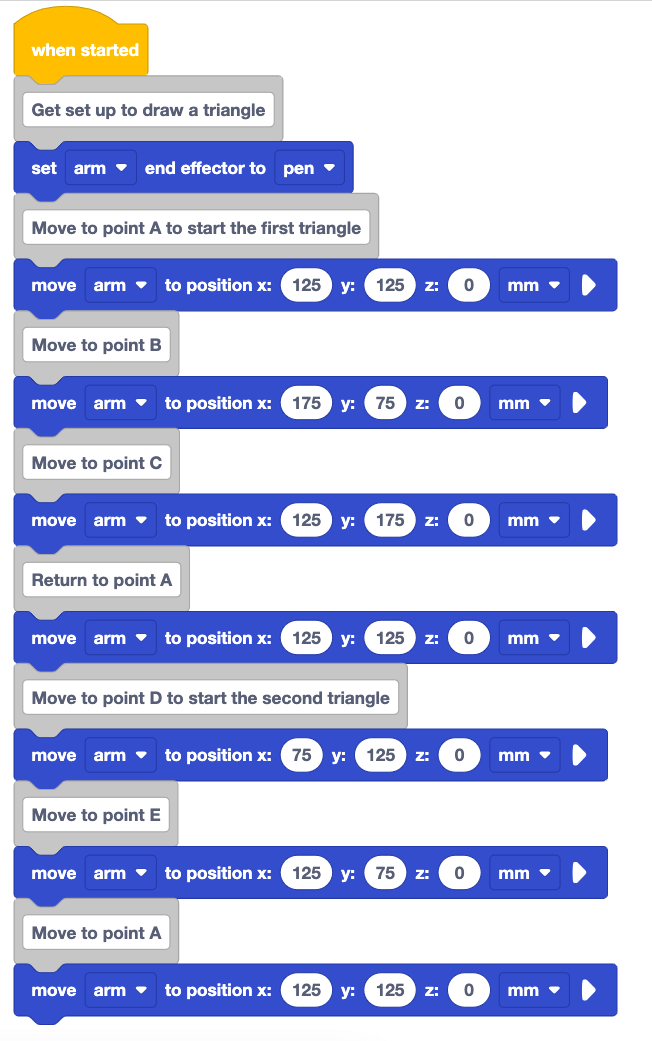
Beyaz Tahtaya ABC üçgenini çizmek için Ünite 5 Ders 3 projesini açın veya projeyi burada gösterildiği gibi yeniden oluşturun.

Burada gösterilen Yorum bloğunu "İlk üçgeni başlatmak için A noktasına git." olarak değiştirin.
İki üçgen çizdiğiniz için, yorum, projedeki hangi blokların birinci üçgeni ve ikinci üçgeni çizmek için kullanıldığına dair bağlam sağlamak üzere değiştirilebilir.
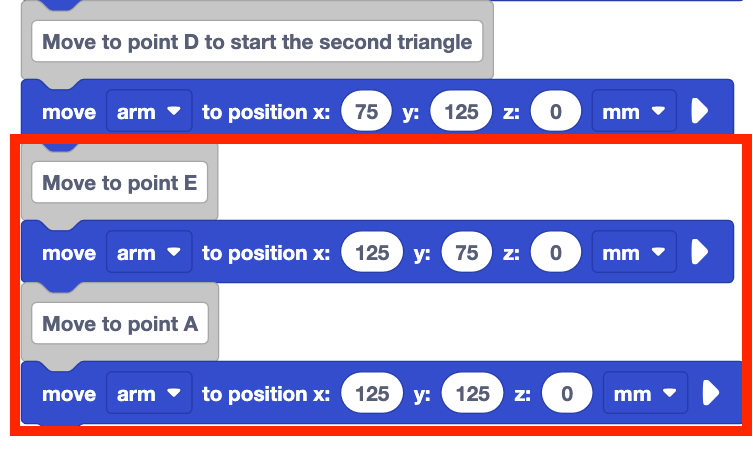
Yığının en altına Yorum bloğu ekleyin ve "İkinci üçgeni başlatmak için D noktasına gidin." yazın.

Yorum bloğunun altındaki yığına Taşı bloğunu ekleyin.
Move to position bloğunun parametrelerini mühendislik not defterinizde belgelenen D noktasının koordinatlarına ayarlayın.

Yorumblok ekleyin ve E noktasına ulaşmak için blok pozisyonuna geçin ve ikinci üçgeni tamamlamak için A noktasına geri dönün.
Move to position bloklarının parametrelerini mühendislik not defterinize kaydettiğiniz E ve A noktalarının koordinatlarına ayarlayın.
Projenizi yeniden adlandırmayı ve cihazınıza kaydetmeyi unutmayın.
Tamamlandığında projenizin tamamı aşağıdaki gibi görünmelidir.
Projenizi oluşturmayı tamamladığınızda, 6-Eksenli Kolun VEXcode EXP'ye bağlı olduğundan emin olun ve projeyi çalıştırın.
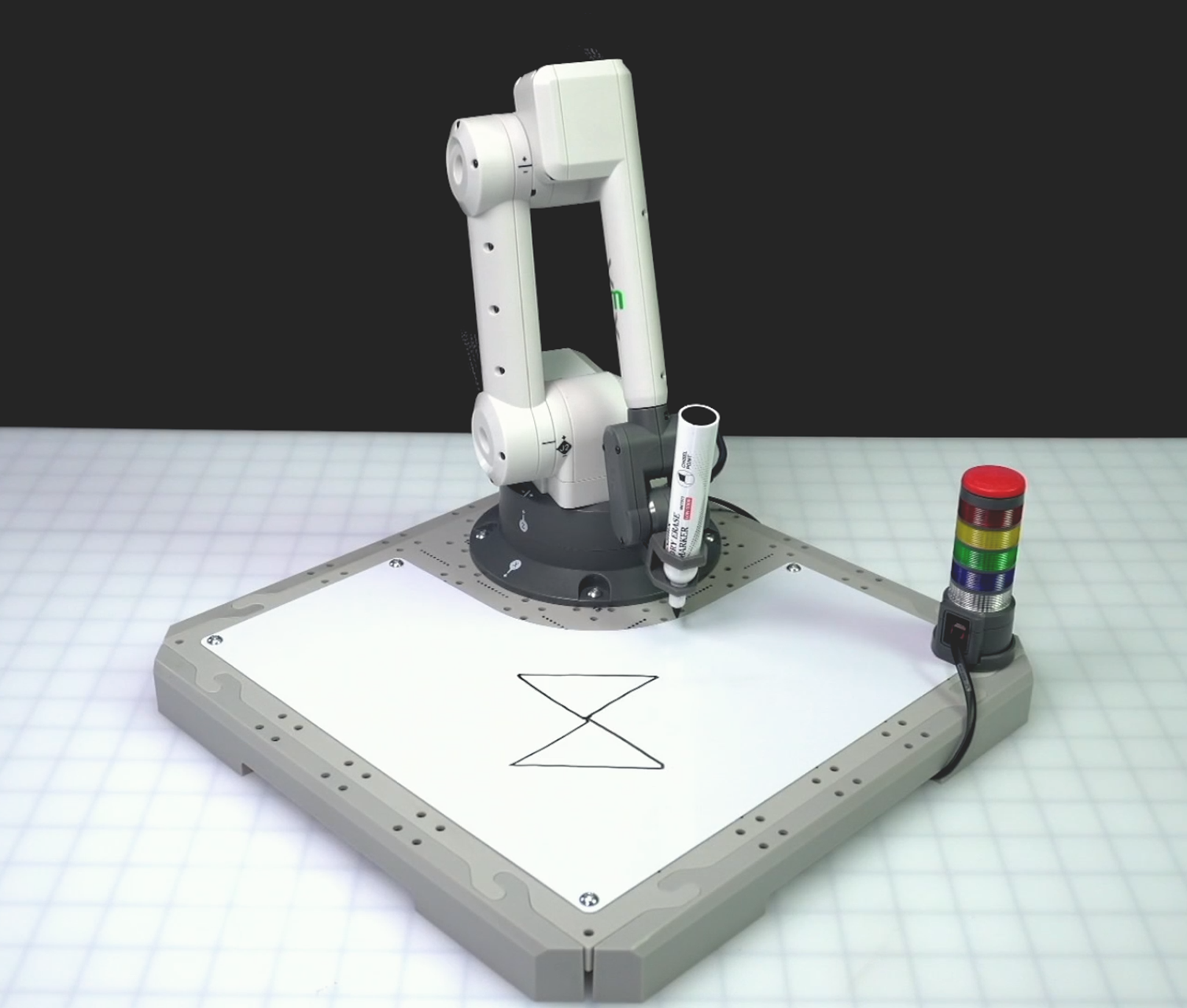
6 Eksenli Kol iki üçgeni çizmeyi tamamladığında projeyi durdurun.
6 Eksenli Kol, 3. Ders'te yaptığı gibi ABC üçgenini çizecektir. Daha sonra ADE üçgeninin ilk kenarını çizmek için D noktasına hareket edilecektir. Daha sonra 6 Eksenli Kol, D noktasından E noktasına hareket ederek ADE üçgeninin ikinci kenarını tamamlayacak ve paketi A noktasına hareket ettirerek üçgeni tamamlayacaktır.
Not:Bu görüntü, proje durdurulduktan sonra 6 Eksenli Kolun manuel olarak hareket ettirildiğini ve böylece her iki üçgenin de net bir şekilde görülebildiğini göstermektedir.
Etkinlik
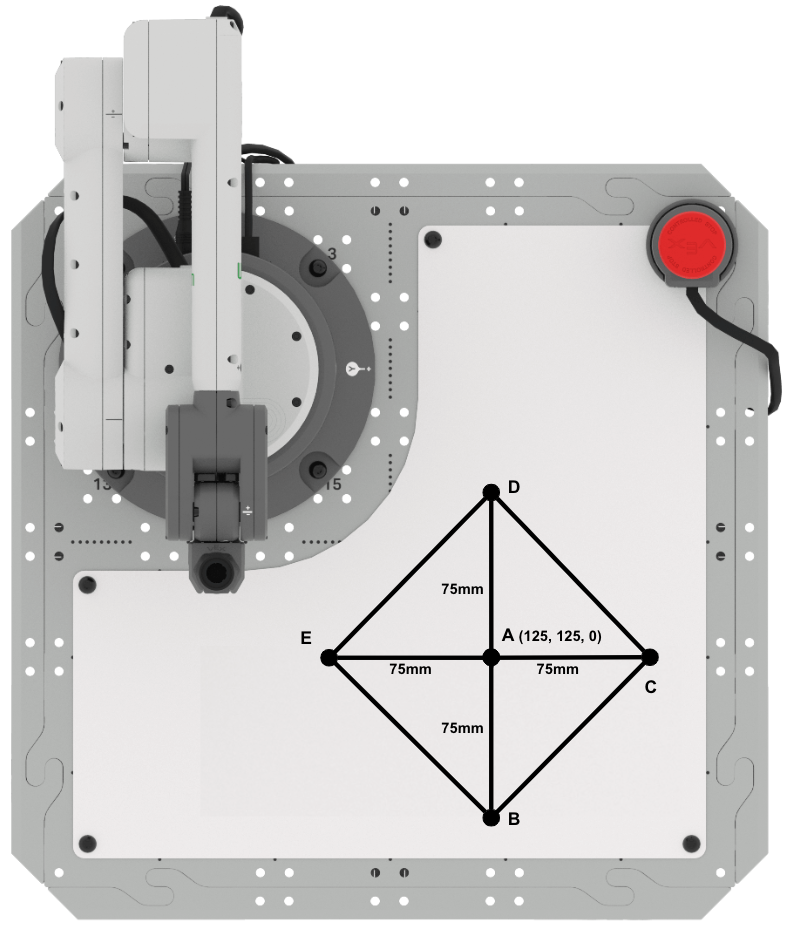
Bu Ders'te eksenler boyunca negatif yönde hareket etmeyi gerektiren kenarları olan üçgenlerin nasıl çizileceğini öğrendiniz. Şimdi öğrendiklerinizi dört üçgenden oluşan bir elmas çizmeye uygulayacaksınız.

- Kurulum:Yukarıda gösterildiği gibi mühendislik defterinize A, B, C, D ve E noktalarını çizin.
- A noktası (125, 125, 0) konumundadır
- AB, AC, AD ve AE kenar uzunlukları 75 mm'dir
- Etkinlik:
- Yukarıdaki B, C, D ve E noktalarının koordinatlarını belirlemek için 3. ve 4. Derslerdeki formülleri kullanın. Koordinatları mühendislik defterinize kaydedin.
- Noktaları birleştirmek ve yukarıda gösterilen şekli çizmek için bir VEXcode EXP projesi oluşturun.
- Ders 4 projesini temel alarak ilerleyebilir veya Sinyal Kulesi Şablonu.
- Başlamak için Set end effector block değerini penolarak ayarladığınızdan emin olun.
- Projenizdeki 6 Eksenli Kolun davranışlarını iletmek için Yorumları kullanın.
- Projenizi oluşturmayı tamamladığınızda, projeyi test etmek için çalıştırın.
- Yukarıda görülen elması projeniz mi çizdi? Aksi takdirde projenizi değiştirmeye devam edin ve başarılı olana kadar test edin.
- Projenizi tamamladıktan sonra projeyi yeniden adlandırın ve cihazınıza kaydedin.
Anlayışınızı Kontrol Edin
Bir sonraki derse geçmeden önce, aşağıdaki belgede yer alan soruları mühendislik defterinize yanıtlayarak bu dersteki kavramları anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları > (Google Dokümanı / .docx / .pdf)
Tümünü Bir Araya Getirme etkinliğini tamamlamak içinSonraki >seçin.