
പാഠം 4: ഒരു വജ്രം വരയ്ക്കൽ
മുൻ പാഠങ്ങളിൽ, നഷ്ടപ്പെട്ട നിർദ്ദേശാങ്കങ്ങൾ കണ്ടെത്തി ഒരു ത്രികോണം എങ്ങനെ വരയ്ക്കാമെന്ന് നിങ്ങൾ പഠിച്ചു. ഈ പാഠത്തിൽ, 6-ആക്സിസ് ഭുജം x അല്ലെങ്കിൽ y-ആക്സിസുകളിലൂടെ നെഗറ്റീവ് ദിശയിലേക്ക് നീങ്ങുമ്പോൾ എന്തുചെയ്യണമെന്നും നഷ്ടപ്പെട്ട നിർദ്ദേശാങ്കങ്ങൾ എങ്ങനെ കണക്കാക്കാമെന്നും നിങ്ങൾ പഠിക്കും.
ഈ പാഠത്തിന്റെ അവസാനം, നിങ്ങൾ നിർണ്ണയിച്ച നിർദ്ദേശാങ്കങ്ങളെ ബന്ധിപ്പിച്ചുകൊണ്ട് ഒരു വജ്രം വരയ്ക്കും.
വിട്ടുപോയ കോർഡിനേറ്റുകൾ കണ്ടെത്തുന്നു
പാഠം 3-ൽ, ത്രികോണത്തിന്റെ ഒരു ബിന്ദുവും രണ്ട് വശങ്ങളുടെ നീളവും അറിഞ്ഞതിന്റെ അടിസ്ഥാനത്തിൽ, ത്രികോണത്തിന്റെ നഷ്ടപ്പെട്ട നിർദ്ദേശാങ്കങ്ങൾ നിങ്ങൾ നിർണ്ണയിച്ചു. ഇനി ആ പ്രോജക്റ്റിൽ നിന്ന് നിങ്ങൾ രണ്ടാമത്തെ ത്രികോണം വരയ്ക്കും.
ഫൈൻഡിംഗ് പോയിന്റ് ഡി
നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ അറിയപ്പെടുന്ന വിവരങ്ങൾ രേഖപ്പെടുത്തുക.
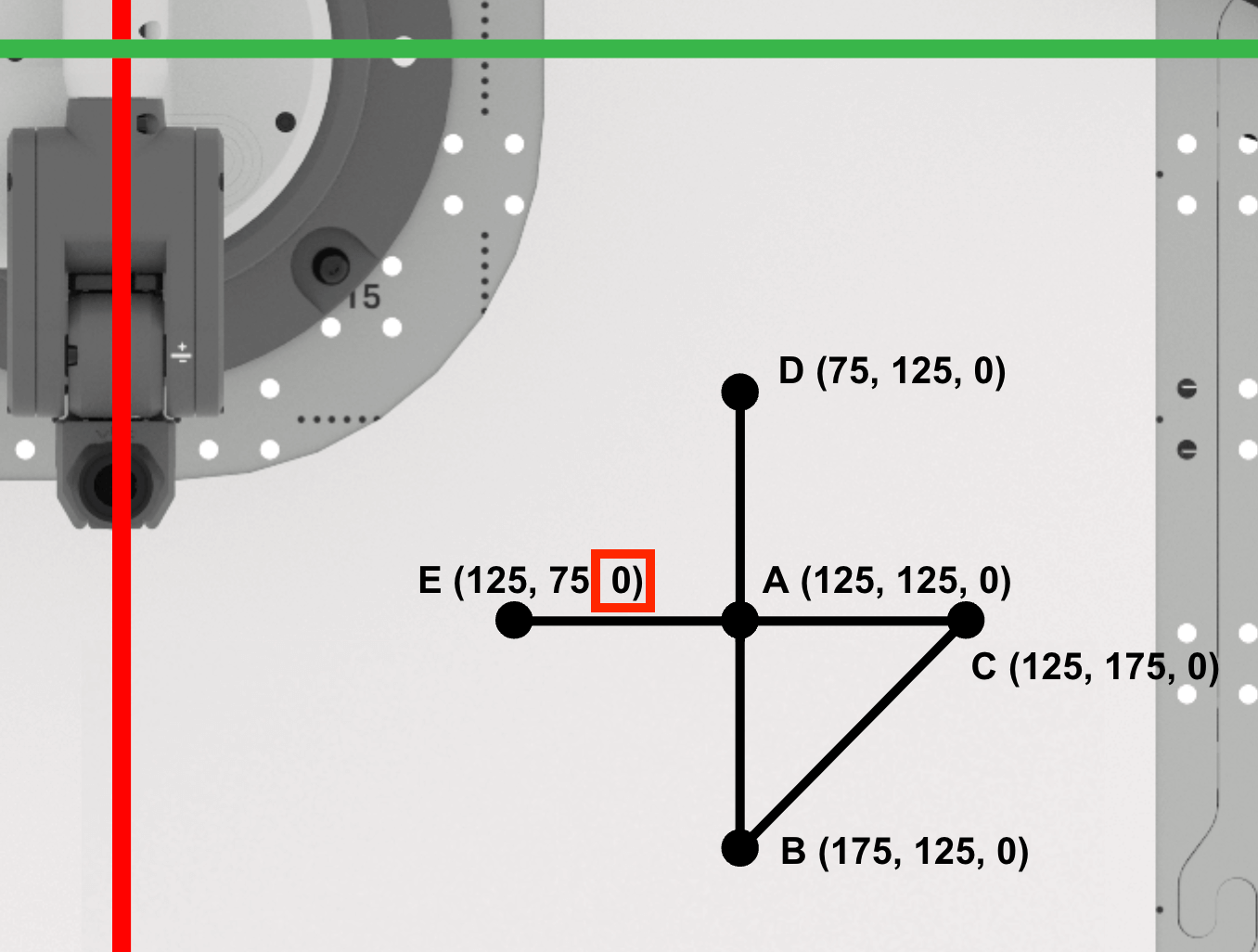
ത്രികോണം ABC ഇനിപ്പറയുന്ന പോയിന്റുകളിൽ സ്ഥിതിചെയ്യുന്നു:
- എ (125, 125, 0)
- ബി (175, 125, 0)
- സി (125, 175, 0)
പാഠം 3 ൽ നിങ്ങൾ വരച്ച ത്രികോണം ഇതായിരുന്നു.
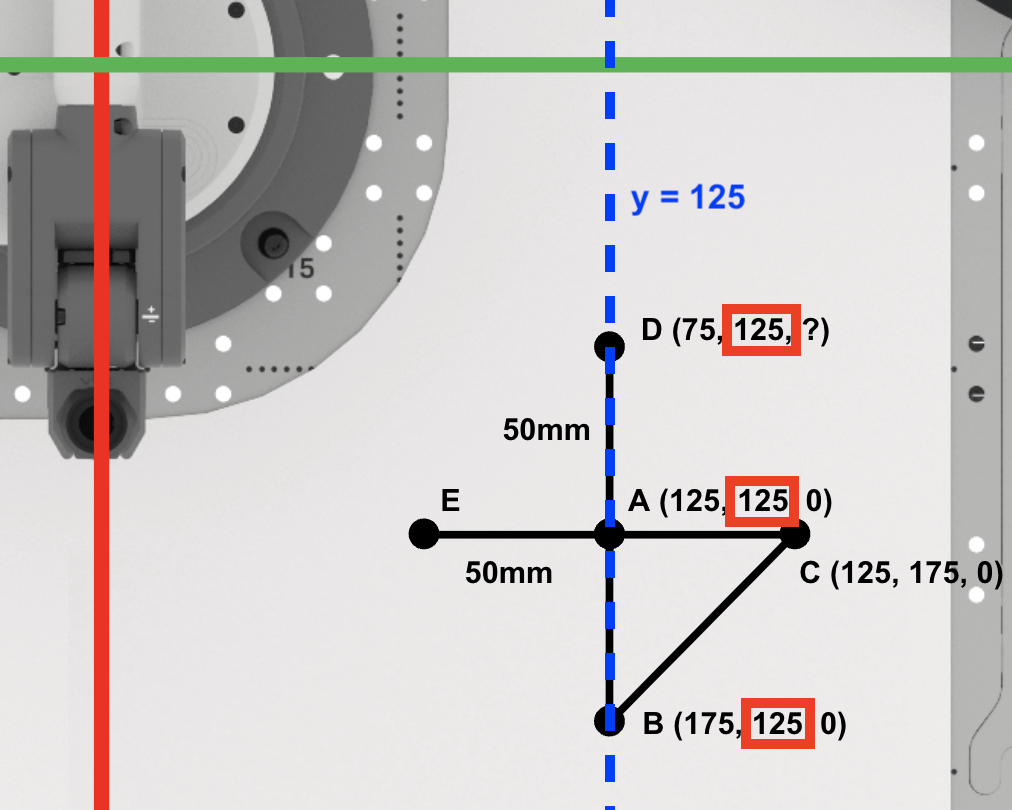
രണ്ടാമത്തെ ത്രികോണമായ ADE യുടെ വശങ്ങളുടെ നീളം 50mm ആണ്, AD യും AE യും വശങ്ങൾക്ക്. ഈ ചിത്രത്തിൽ നീല വരകളും വാചകവും ഉപയോഗിച്ച് ADE ത്രികോണത്തിന്റെ വശങ്ങൾ കാണിച്ചിരിക്കുന്നു.
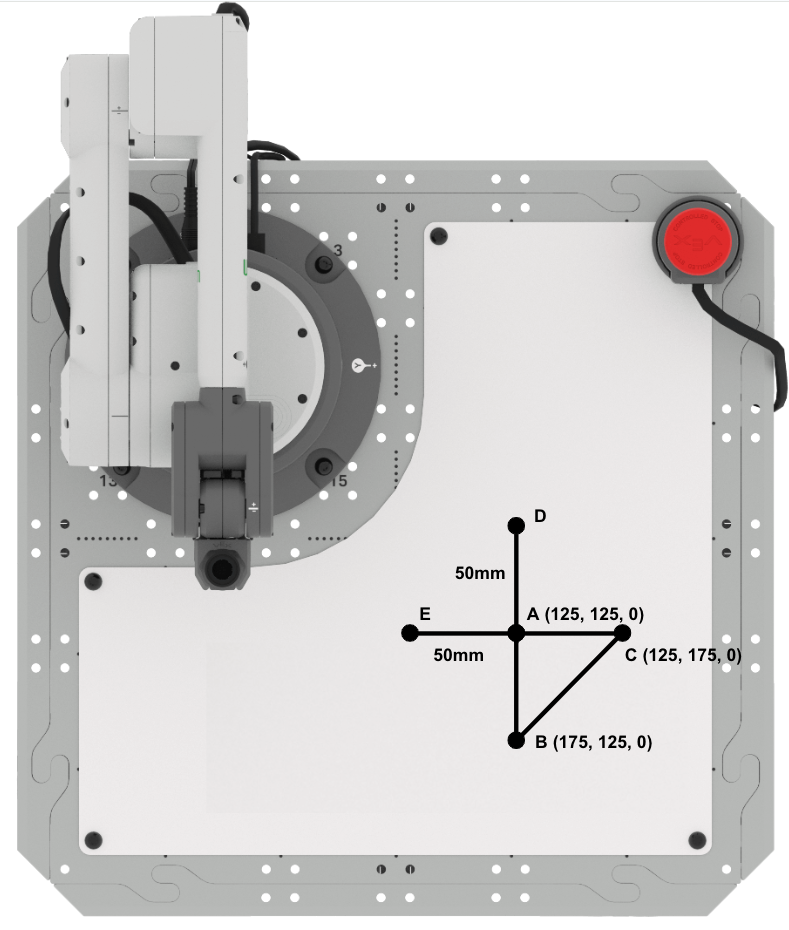
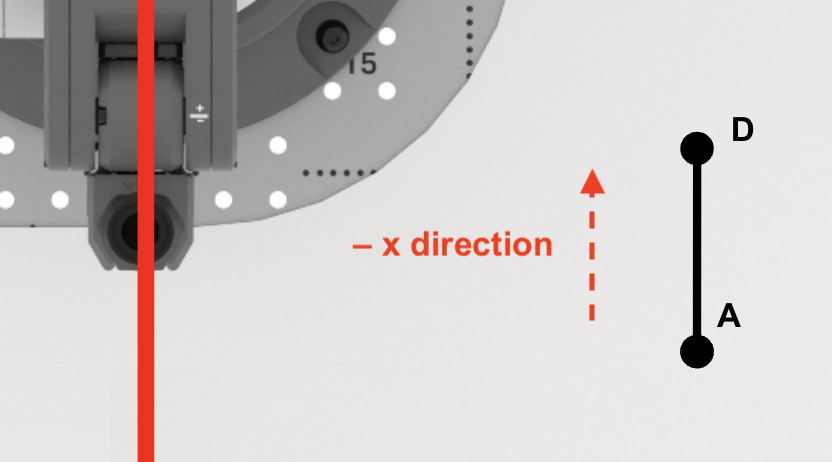
വലത് ത്രികോണമായ ADE യുടെ AD വശം x-അക്ഷത്തിന് സമാന്തരമാണ്.
A എന്ന ബിന്ദുവിൽ നിന്ന് D എന്ന ബിന്ദുവിലേക്ക് x-അക്ഷത്തിലൂടെ നീങ്ങുമ്പോൾ, x-കോർഡിനേറ്റുകൾക്ക് എന്ന മൂല്യം കുറഞ്ഞ്ലഭിക്കുമെന്ന് ശ്രദ്ധിക്കുക. പോയിന്റ് D യുടെ x-കോർഡിനേറ്റ് കണക്കാക്കാൻ ഉപയോഗിക്കുന്ന സമവാക്യത്തിൽ ഇത് പ്രതിഫലിക്കും.
ബിന്ദു D യുടെ x-കോർഡിനേറ്റ് കണ്ടെത്തുക.
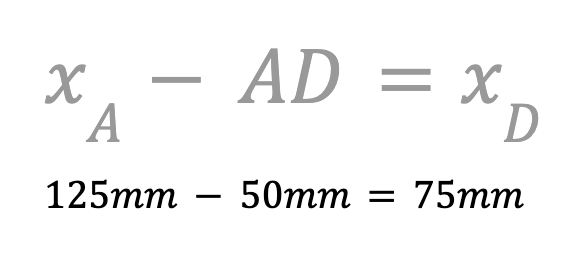
6-ആക്സിസ് ഭുജം x-ആക്സിസിലൂടെ നെഗറ്റീവ് ദിശയിലേക്ക് നീങ്ങുന്നതിനാൽ, നിങ്ങൾ കുറയ്ക്കൽ ഉപയോഗിക്കേണ്ടതുണ്ട്. ബിന്ദു A യുടെ x-കോർഡിനേറ്റിൽ നിന്ന് AD യുടെ നീളം കുറയ്ക്കുക, ബിന്ദു D യുടെ x-കോർഡിനേറ്റ് കണ്ടെത്തുക.
പോയിന്റ് D യുടെ x-കോർഡിനേറ്റ് 75mm ആണ്. ഇത് നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
അടുത്തതായി, പോയിന്റ് D യുടെ y- കോർഡിനേറ്റ് നമുക്ക് കണ്ടെത്താം.
A, B, D എന്നീ ബിന്ദുക്കൾ y=125mm എന്ന രേഖയിലായതിനാൽ, ബിന്ദു D യുടെ y-കോർഡിനേറ്റ് A, B എന്നീ ബിന്ദുക്കൾക്ക് തുല്യമാണ് (125mm). ഇത് നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
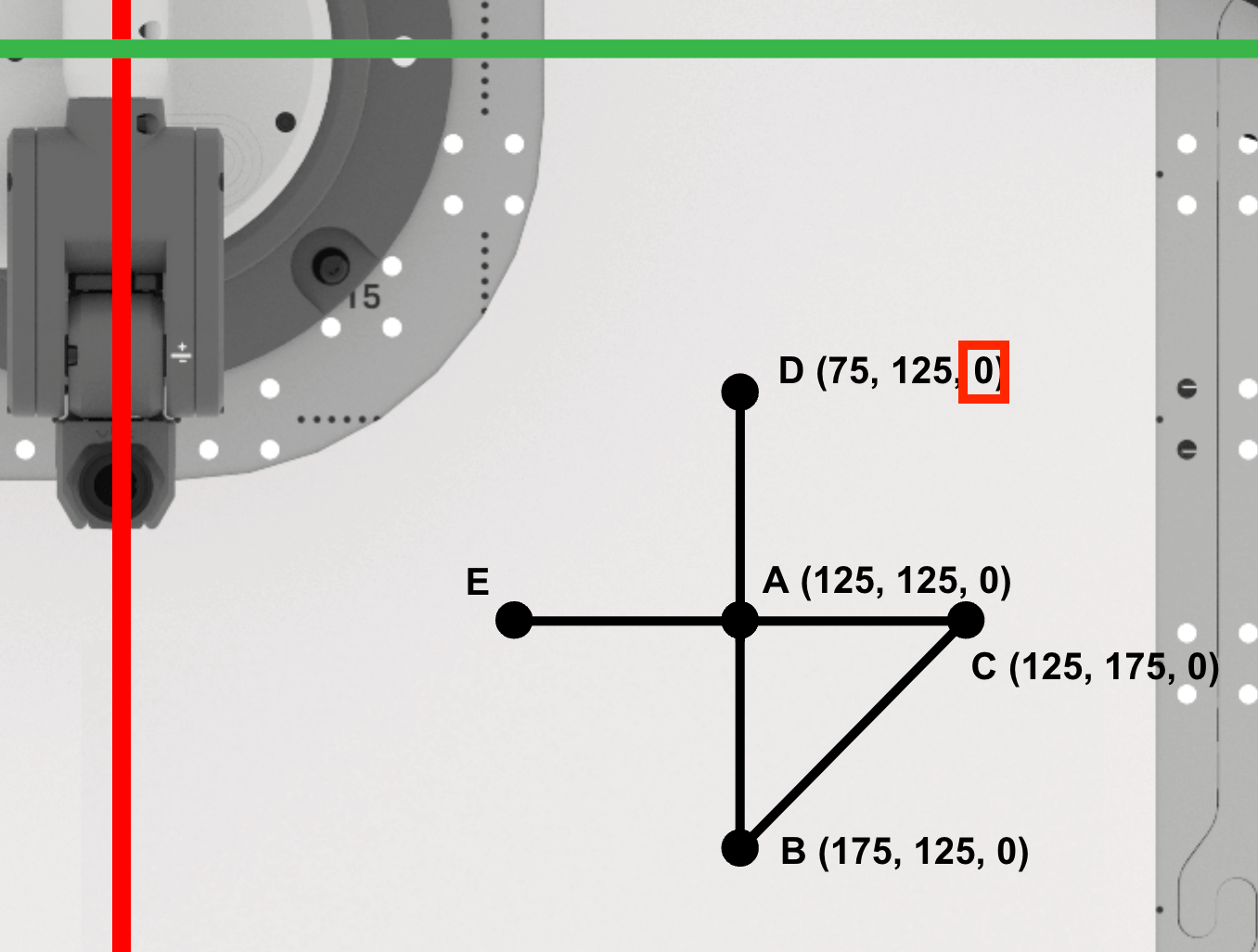
A, D എന്നീ പോയിന്റുകൾക്കിടയിൽ പേന ഉയരാത്തതിനാൽ, D എന്ന പോയിന്റിന്റെ z-കോർഡിനേറ്റ് പൂജ്യമായി തുടരും.
പോയിന്റ് D എന്നത് (75, 125, 0) ആണ്. ഇത് നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
പോയിന്റ് E കണ്ടെത്തൽ
പോയിന്റ് E യുടെ x-കോർഡിനേറ്റ് കണ്ടെത്തുക.
A, C, E എന്നീ ബിന്ദുക്കൾ x=125mm എന്ന രേഖയിലായതിനാൽ, E എന്ന ബിന്ദുവിന്റെ x-മൂല്യം A, C എന്നീ ബിന്ദുക്കൾക്ക് തുല്യമാണ് (125mm).
ഇത് നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
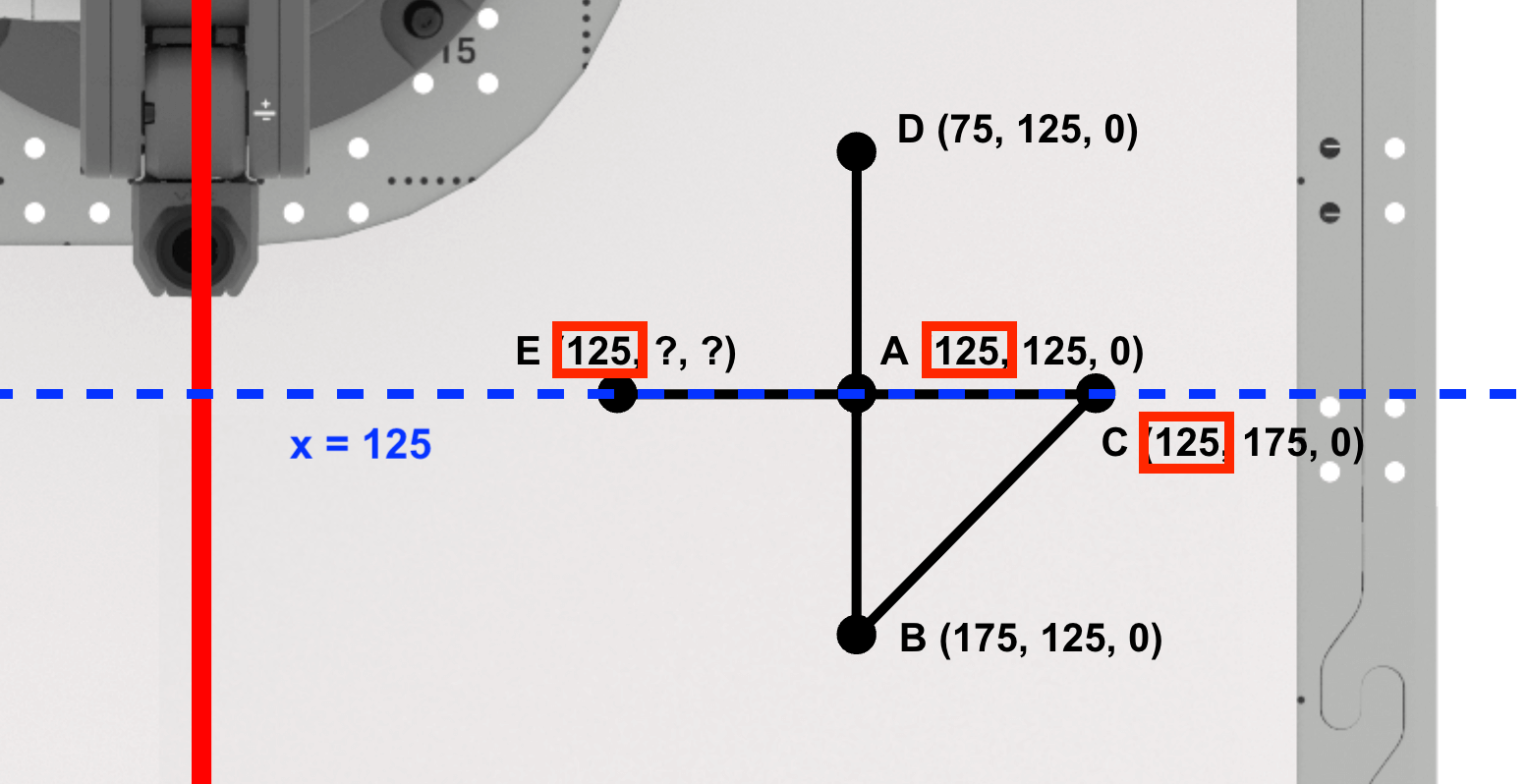
വലത് ത്രികോണമായ ADE യുടെ AE വശം y-അക്ഷത്തിന് സമാന്തരമാണ്.
ശ്രദ്ധിക്കുക, നിങ്ങൾ A എന്ന ബിന്ദുവിൽ നിന്ന് E എന്ന ബിന്ദുവിലേക്ക് y-അക്ഷത്തിലൂടെ നീങ്ങുകയാണെങ്കിൽ, y-കോർഡിനേറ്റുകൾക്ക് മൂല്യം ന് താഴെലഭിക്കും. പോയിന്റ് E യുടെ y- കോർഡിനേറ്റ് കണക്കാക്കാൻ ഉപയോഗിക്കുന്ന സമവാക്യത്തിൽ ഇത് പ്രതിഫലിക്കും.

അടുത്തതായി, പോയിന്റ് E യുടെ y- കോർഡിനേറ്റ് കണ്ടെത്തുക.
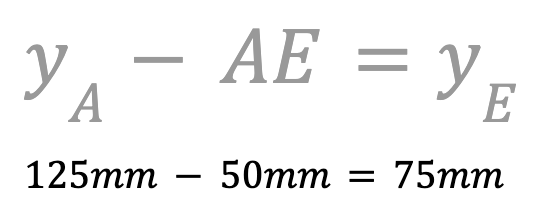
6-ആക്സിസ് ഭുജം y-ആക്സിസിലൂടെ നെഗറ്റീവ് ദിശയിലേക്ക് നീങ്ങുന്നതിനാൽ, നിങ്ങൾ കുറയ്ക്കൽ ഉപയോഗിക്കേണ്ടതുണ്ട്. പോയിന്റ് A യുടെ y- കോർഡിനേറ്റിൽ നിന്ന് AE യുടെ നീളം കുറയ്ക്കുന്നതിലൂടെ പോയിന്റ് E യുടെ y- കോർഡിനേറ്റ് കണ്ടെത്തുക.
പോയിന്റ് E യുടെ y-കോർഡിനേറ്റ് 75mm ആണ്. ഇത് നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
D, E എന്നീ പോയിന്റുകൾക്കിടയിൽ പേന ഉയരാത്തതിനാൽ, E എന്ന പോയിന്റിന്റെ z-കോർഡിനേറ്റ് പൂജ്യമായി തുടരും.
പോയിന്റ് E എന്നത് (125, 75, 0) ആണ്. ഇത് നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
ത്രികോണം ADE വരയ്ക്കാൻ 6-ആക്സിസ് ഭുജം കോഡ് ചെയ്യുന്നു.
ഇപ്പോൾ നിങ്ങൾ D, E എന്നീ പോയിന്റുകളുടെ കോർഡിനേറ്റുകൾ നിർണ്ണയിച്ചുകഴിഞ്ഞു, മറ്റൊരു ത്രികോണം വരയ്ക്കുന്നതിന് A, D, E എന്നീ പോയിന്റുകളെ ബന്ധിപ്പിക്കുന്നതിന് 6-ആക്സിസ് ആംമിനായി ഒരു VEXcode EXP പ്രോജക്റ്റ് സൃഷ്ടിക്കേണ്ട സമയമാണിത്.
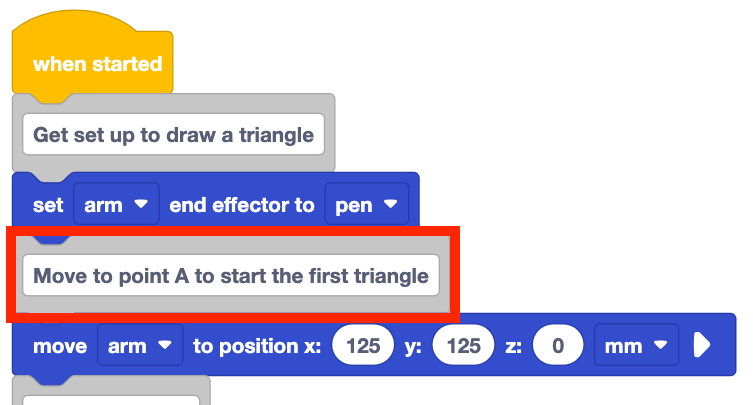
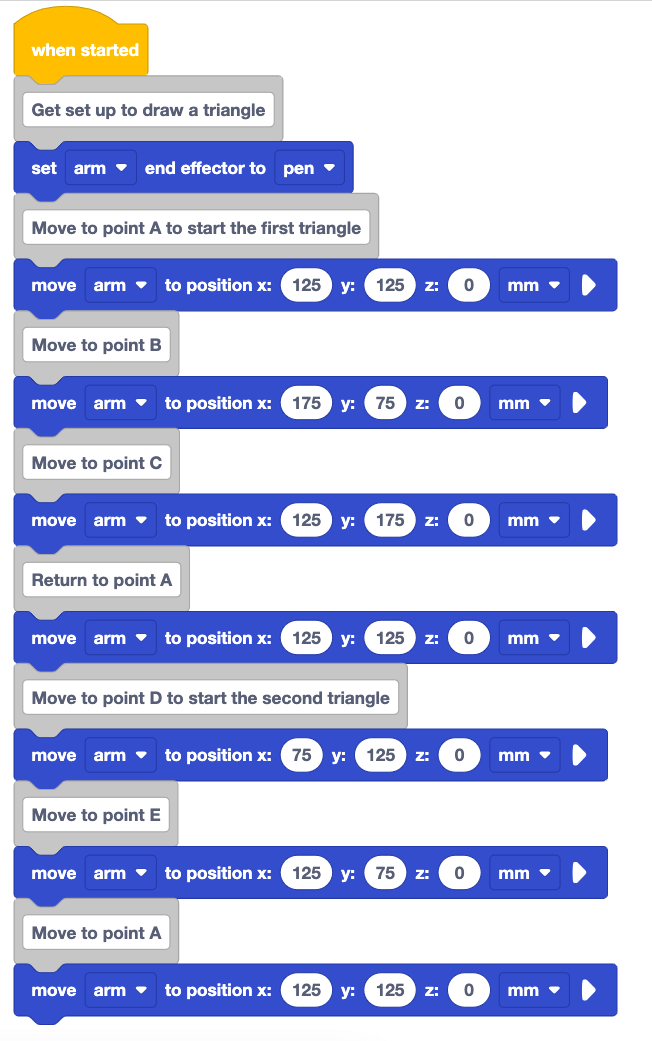
വൈറ്റ്ബോർഡിൽ ത്രികോണം ABC വരയ്ക്കാൻ യൂണിറ്റ് 5 പാഠം 3 പ്രോജക്റ്റ് തുറക്കുക, അല്ലെങ്കിൽ ഇവിടെ കാണിച്ചിരിക്കുന്നതുപോലെ പ്രോജക്റ്റ് പുനഃസൃഷ്ടിക്കുക.

ഇവിടെ കാണിച്ചിരിക്കുന്ന കമന്റ് ബ്ലോക്ക് "ആദ്യ ത്രികോണം ആരംഭിക്കാൻ പോയിന്റ് A യിലേക്ക് നീക്കുക" എന്ന് മാറ്റുക.
നിങ്ങൾ രണ്ട് ത്രികോണങ്ങൾ വരയ്ക്കുന്നതിനാൽ, ആദ്യത്തെ ത്രികോണവും രണ്ടാമത്തെ ത്രികോണവും വരയ്ക്കാൻ പ്രോജക്റ്റിലെ ഏതൊക്കെ ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നുവെന്നതിന്റെ സന്ദർഭം നൽകുന്നതിന് അഭിപ്രായം മാറ്റാൻ കഴിയും.
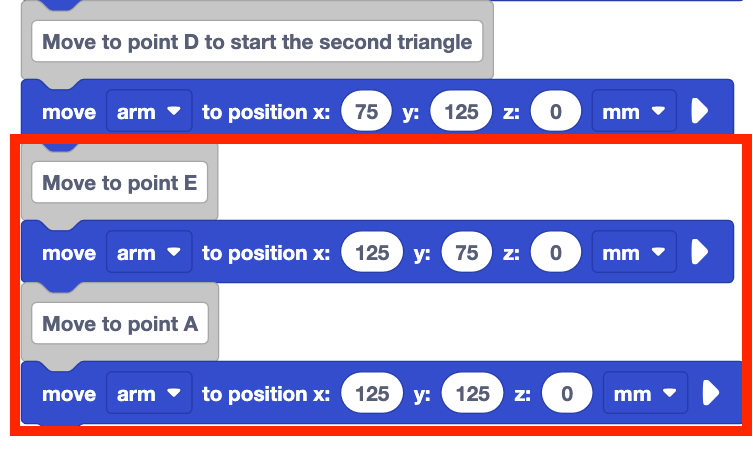
സ്റ്റാക്കിന്റെ അടിയിൽ ഒരു കമന്റ് ബ്ലോക്ക് ചേർത്ത് "രണ്ടാമത്തെ ത്രികോണം ആരംഭിക്കാൻ പോയിന്റ് D യിലേക്ക് നീക്കുക" എന്ന് ടൈപ്പ് ചെയ്യുക.

കമന്റ് ബ്ലോക്കിന് താഴെയുള്ള സ്റ്റാക്കിലേക്ക് ബ്ലോക്ക് സ്ഥാപിക്കാൻ ഒരു മൂവ് ചേർക്കുക.
നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തിയിരിക്കുന്ന, പോയിന്റ് D യുടെ കോർഡിനേറ്റുകളിലേക്ക് ബ്ലോക്കിന്റെ പാരാമീറ്ററുകളുടെ സ്ഥാനം നീക്കുക.

കമന്റ്ബ്ലോക്കുകളും ചേർക്കുക. രണ്ടാമത്തെ ത്രികോണം പൂർത്തിയാക്കാൻ പോയിന്റ് E യ്ക്കായി ബ്ലോക്കുകളുടെ സ്ഥാനത്തേക്ക് നീക്കുക, പോയിന്റ് A യിലേക്ക് മടങ്ങുക.
നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തിയിരിക്കുന്ന പോയിന്റുകൾ E, A എന്നിവയുടെ കോർഡിനേറ്റുകളിലേക്ക് ബ്ലോക്കുകളുടെ സ്ഥാനത്തേക്ക് നീക്കുക. ന്റെ പാരാമീറ്ററുകൾ സജ്ജമാക്കുക.
നിങ്ങളുടെ പ്രോജക്റ്റ് പുനർനാമകരണം ചെയ്ത് നിങ്ങളുടെ ഉപകരണത്തിൽ സംരക്ഷിക്കുന്നത് ഉറപ്പാക്കുക.
പൂർത്തിയാകുമ്പോൾ നിങ്ങളുടെ മുഴുവൻ പ്രോജക്റ്റും ഇതുപോലെയായിരിക്കണം.
നിങ്ങളുടെ പ്രോജക്റ്റ് നിർമ്മിച്ചു കഴിയുമ്പോൾ, 6-ആക്സിസ് ആം VEXcode EXP-ലേക്ക് ബന്ധിപ്പിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുകയും പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുകയും ചെയ്യുക.
6-ആക്സിസ് ആം രണ്ട് ത്രികോണങ്ങളും വരയ്ക്കുന്നത് പൂർത്തിയാക്കുമ്പോൾ പ്രോജക്റ്റ് നിർത്തുക.
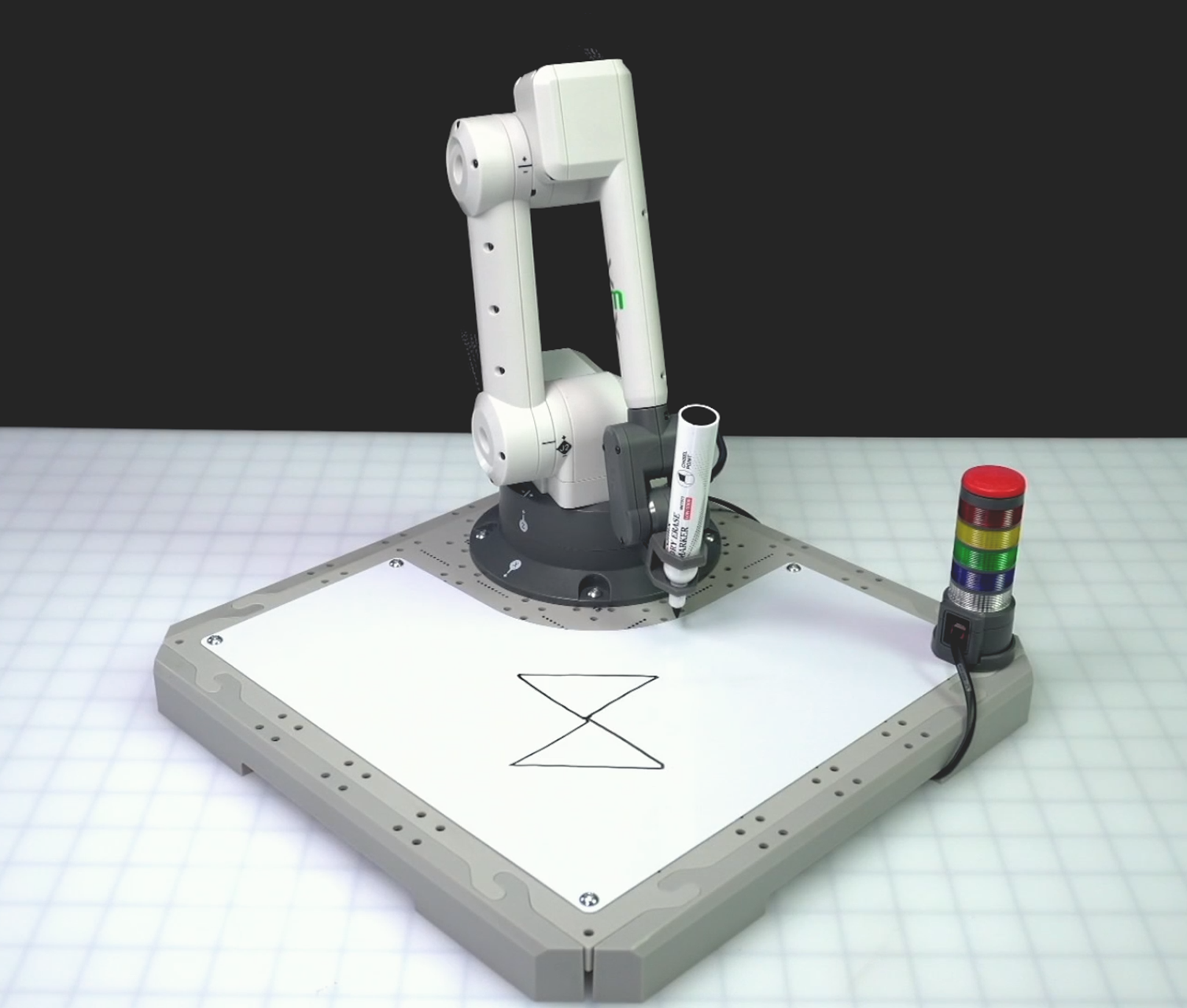
പാഠം 3-ൽ ചെയ്തതുപോലെ 6-ആക്സിസ് ഭുജം ത്രികോണം ABC വരയ്ക്കും. പിന്നെ അത് ADE ത്രികോണത്തിന്റെ ആദ്യവശം വരയ്ക്കാൻ D എന്ന ബിന്ദുവിലേക്ക് നീങ്ങും. പിന്നെ 6-ആക്സിസ് ഭുജം, ADE ത്രികോണത്തിന്റെ രണ്ടാം വശം പൂർത്തിയാക്കാൻ D പോയിന്റിൽ നിന്ന് E പോയിന്റിലേക്ക് നീങ്ങുകയും, പായ്ക്ക് A പോയിന്റിലേക്ക് നീക്കി ത്രികോണം പൂർത്തിയാക്കുകയും ചെയ്യും.
കുറിപ്പ്:പ്രോജക്റ്റ് നിർത്തിയതിനുശേഷം 6-ആക്സിസ് ആം സ്വമേധയാ നീക്കിയതായി ഈ ചിത്രം കാണിക്കുന്നു, അങ്ങനെ രണ്ട് ത്രികോണങ്ങളും വ്യക്തമായി കാണാൻ കഴിയും.
പ്രവർത്തനം
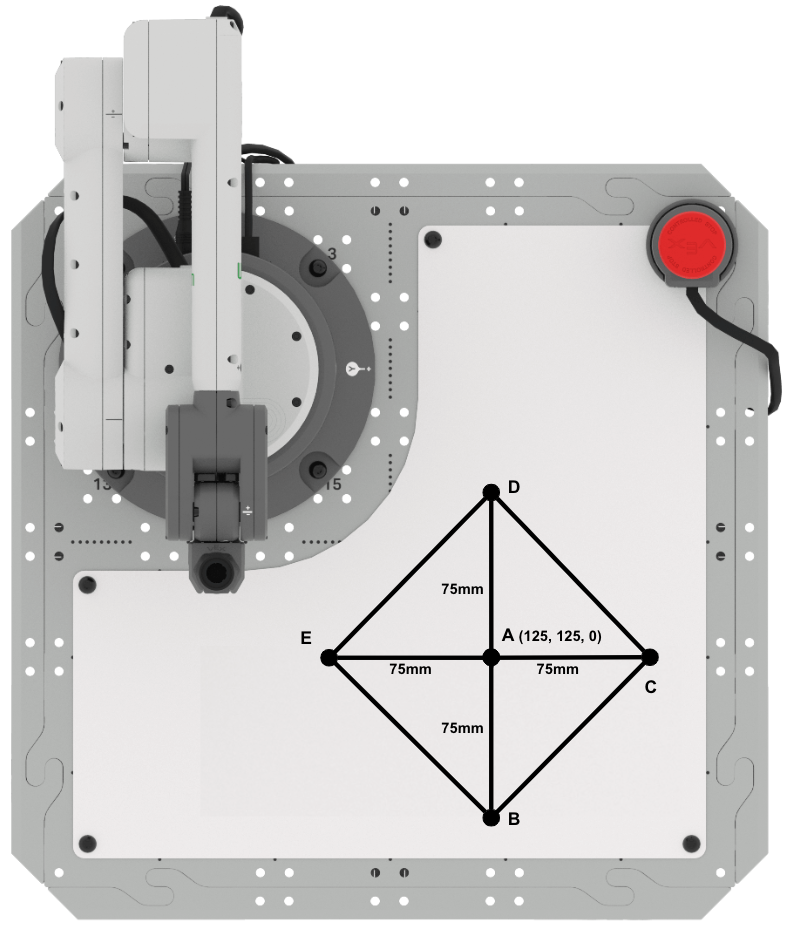
ഈ പാഠത്തിൽ, അക്ഷങ്ങളിൽ നെഗറ്റീവ് ദിശയിൽ ചലിക്കേണ്ട വശങ്ങളുള്ള ത്രികോണങ്ങൾ എങ്ങനെ വരയ്ക്കാമെന്ന് നിങ്ങൾ പഠിച്ചു. ഇനി നിങ്ങൾ നാല് ത്രികോണങ്ങൾ കൊണ്ട് നിർമ്മിച്ച ഒരു വജ്രം വരയ്ക്കാൻ നിങ്ങളുടെ പഠനം പ്രയോഗിക്കും.

- സജ്ജീകരണം:മുകളിൽ കാണിച്ചിരിക്കുന്നതുപോലെ നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ A, B, C, D, E എന്നീ പോയിന്റുകൾ വരയ്ക്കുക.
- പോയിന്റ് എ (125, 125, 0) ൽ സ്ഥിതിചെയ്യുന്നു.
- AB, AC, AD, AE എന്നിവയുടെ വശങ്ങളുടെ നീളം 75mm ആണ്.
- പ്രവർത്തനം:
- മുകളിലുള്ള ബി, സി, ഡി, ഇ എന്നീ പോയിന്റുകളുടെ കോർഡിനേറ്റുകൾ നിർണ്ണയിക്കാൻ പാഠം 3, 4 എന്നിവയിൽ നിന്നുള്ള സൂത്രവാക്യങ്ങൾ ഉപയോഗിക്കുക. നിങ്ങളുടെ എഞ്ചിനീയറിങ് നോട്ട്ബുക്കിൽ നിർദ്ദേശാങ്കങ്ങൾ രേഖപ്പെടുത്തുക.
- പോയിന്റുകളെ ബന്ധിപ്പിക്കുന്നതിനും മുകളിൽ കാണിച്ചിരിക്കുന്ന ആകൃതി വരയ്ക്കുന്നതിനും ഒരു VEXcode EXP പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
- നിങ്ങൾക്ക് പാഠം 4 പ്രോജക്റ്റിൽ നിന്ന് നിർമ്മിക്കാം, അല്ലെങ്കിൽ സിഗ്നൽ ടവർ ടെംപ്ലേറ്റ് പ്രോജക്റ്റ്ഡൗൺലോഡ് .
- ആരംഭിക്കുന്നതിന് സെറ്റ് എൻഡ് ഇഫക്ടർ ബ്ലോക്ക് പെൻആയി സജ്ജീകരിക്കുന്നത് ഉറപ്പാക്കുക.
- നിങ്ങളുടെ പ്രോജക്റ്റിലെ 6-ആക്സിസ് ആമിന്റെ സ്വഭാവരീതികൾ ആശയവിനിമയം ചെയ്യാൻ അഭിപ്രായങ്ങൾ ഉപയോഗിക്കുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ് നിർമ്മിച്ചുകഴിഞ്ഞാൽ, അത് പരീക്ഷിക്കുന്നതിനായി പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
- മുകളിൽ കാണിച്ചിരിക്കുന്ന വജ്രം നിങ്ങളുടെ പ്രോജക്റ്റ് വരച്ചതാണോ? ഇല്ലെങ്കിൽ, നിങ്ങളുടെ പ്രോജക്റ്റ് പരിഷ്ക്കരിക്കുന്നത് തുടരുക, നിങ്ങൾ വിജയിക്കുന്നതുവരെ അത് പരീക്ഷിക്കുക.
- പ്രോജക്റ്റ് പൂർത്തിയാക്കിയ ശേഷം, അതിന്റെ പേര് മാറ്റി നിങ്ങളുടെ ഉപകരണത്തിൽ സേവ് ചെയ്യുക.
നിങ്ങളുടെ ധാരണ പരിശോധിക്കുക
അടുത്ത പാഠത്തിലേക്ക് പോകുന്നതിനു മുമ്പ്, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ താഴെയുള്ള ഡോക്യുമെന്റിലെ ചോദ്യങ്ങൾക്ക് ഉത്തരം നൽകി ഈ പാഠത്തിലെ ആശയങ്ങൾ മനസ്സിലാക്കിയിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
നിങ്ങളുടെ ധാരണാ ചോദ്യങ്ങൾ പരിശോധിക്കുക > (Google Doc / .docx / .pdf)
പുട്ടിംഗ് ഇറ്റ് ഓൾ ടുഗെദർ പ്രവർത്തനം പൂർത്തിയാക്കാൻഅടുത്തത് >തിരഞ്ഞെടുക്കുക.