
Mempelajari
Sebelum Anda dapat mengendarai TrainingBot dalam Tantangan Angka Delapan, Anda perlu terlebih dahulu mempelajari cara mengendarai TrainingBot menggunakan Pengendali.
Program Kontrol Pengemudi
Ada program yang sudah tertanam dalam Brain yang memungkinkan Anda mengendalikan TrainingBot menggunakan Controller tanpa harus menulis kode apa pun. Lihat animasi di bawah dan ikuti untuk menjalankan program Kontrol Pengemudi di Brain.
Konfigurasi Pengontrol
Ada empat konfigurasi berbeda dari program Kontrol Pengemudi di Brain: Penggerak Kiri, Kanan, Terbagi, dan Ganda. Ikuti langkah-langkah dalam animasi di bawah ini untuk mempelajari masing-masing dari keempat konfigurasi tersebut, dan cara memilihnya di Brain.
Lihat animasi untuk mengetahui cara memilih konfigurasi Pengendali untuk program Kontrol Pengemudi di Brain. Langkah-langkahnya meliputi:
- Tekan ikon 'Drive' untuk memilih program Drive.
- Pilih ikon 'Kontrol' untuk melihat opsi konfigurasi.
- Pilih 'Kiri', 'Ganda', 'Pisah', atau 'Kanan' untuk melihat setiap konfigurasi Pengontrol.
Masing-masing dari empat pilihan kontrol pengemudi memungkinkan Anda mengontrol BaseBot menggunakan joystick dengan cara yang berbeda.
| Konfigurasi | Keterangan | Kontrol Joystick |
|---|---|---|
 |
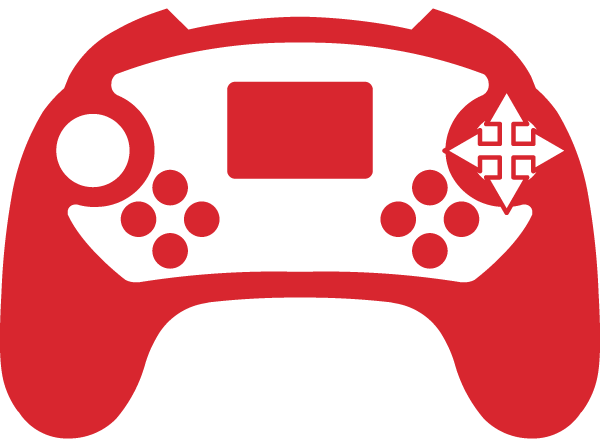
Kiri Gerakkan robot maju, mundur, kiri, dan kanan, semuanya menggunakan joystick kiri. |
 |
 |
Benar Gerakkan robot maju, mundur, ke kiri, dan ke kanan, semuanya menggunakan joystick kanan. |
 |
 |
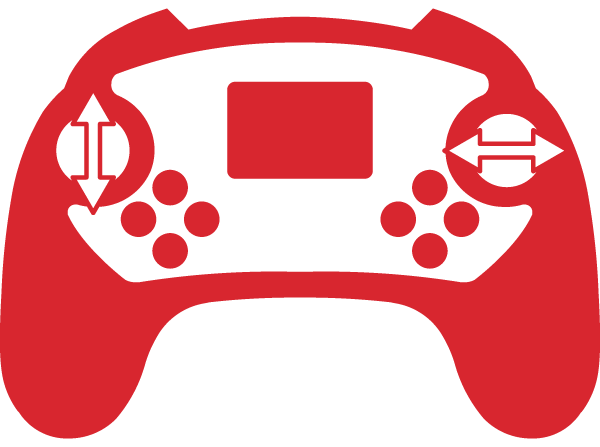
Membelah Gerakkan robot ke kiri dan kanan menggunakan joystick kiri, dan maju dan mundur menggunakan joystick kanan. |
 |
 |
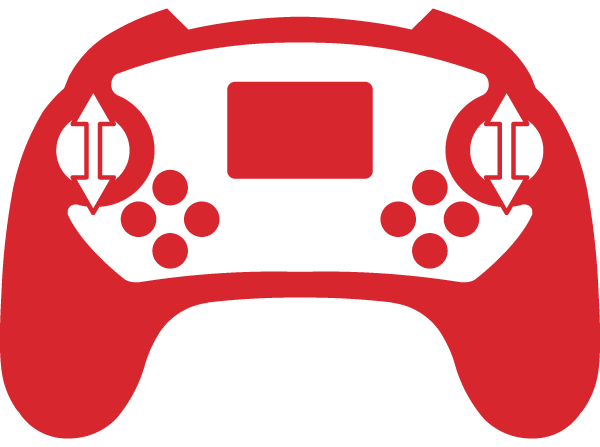
Ganda Kendarai motor kiri robot menggunakan joystick kiri, dan motor kanan robot menggunakan joystick kanan. |
 |
Periksa Pemahaman Anda
Sebelum melanjutkan ke bagian Praktik, pastikan Anda memahami konsep yang dibahas di halaman ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda Google / .docx / .pdf
PilihBerikutnya > untuk berlatih menggunakan program kontrol pengemudi dengan robot Anda.