
![]() 教師用ツールボックス
-
このアクティビティの目的
教師用ツールボックス
-
このアクティビティの目的
反復的な動作のプログラミングは、[Repeat] または [Forever] ループを使用して実行できます。 つまり、[Repeat] ブロックを使用すると、プログラマはループ内のブロックを繰り返す特定の回数を設定できます。 [Forever] ブロックは、ループ内のブロックを永久に、またはプロジェクトが停止するまで繰り返します。 このアクティビティでは、生徒は両方について学びます。
[Repeat] または [Forever] ループを使用したプログラミングの詳細については、VEXcode IQ 内の ヘルプ情報 を参照してください。
このアクティビティで学生が行うことの概要は次のとおりです。
-
ループの使用 チュートリアル ビデオをご覧ください。
-
繰り返しアクションのサンプル プロジェクトを調べてください。
-
[Forever] ブロックと [Repeat] ブロックを比較対照します。
-
スクエア ループ チャレンジを完了すると、生徒はクローボットを四角形に動かし、各ターンの前に爪とアームを動かすように求められます。
このアクティビティへの生徒の手配については、ここをクリックしてください (Google / .docx / .pdf)。
各グループのビルダーは、必要なハードウェアを入手する必要があります。 記録者はグループのエンジニアリング ノートを取得する必要があります。 プログラマーは VEXcode IQ を開く必要があります。
| 量 | 必要な材料 |
|---|---|
| 1 |
VEX IQ スーパーキット |
| 1 |
VEXコードIQ |
| 1 |
エンジニアリングノート |
| 1 |
ループの使用 (チュートリアル) |
| 1 |
繰り返しアクションのサンプルプロジェクト |
このアクティビティでは、ロボットに繰り返し動作をプログラムするためのツールが提供されます。
VEXcode IQ 内のヘルプ情報を使用して、ブロックについて学ぶことができます。 ヘルプ 機能の使用方法については、「ヘルプの使用」チュートリアルを参照してください。
![]() 教師へのヒント
教師へのヒント
学生が VEXcode IQ を初めて使用する場合は、ツールバーのチュートリアルを参照して、他の基本的なスキルを学ぶこともできます。 
![]() 教師へのヒント
教師へのヒント
生徒向けにトラブルシューティングの各手順をモデル化します。 各グループにはビルダーの役割を担う人がいることを生徒たちに思い出させます。 その人は、アクティビティを通じてこれらの項目を定期的にチェックする必要があります。
ステップ 1: アクティビティの準備
アクティビティを始める前に、これらのアイテムはすべて準備できていますか? ビルダーは次のそれぞれを確認する必要があります。
-
すべてのモーターとセンサーは正しいポートに接続されていますか?
-
スマート ケーブル はすべてのモーターとセンサーに完全に挿入されていますか ?
-
脳は オンですか?
-
バッテリーは 充電されていますか?
-
Robot Brainには Radio が挿入されていますか?
ステップ 2: ループを使用したプログラミングを始めましょう。
まず、VEXcode IQ の ループの使用 チュートリアル」ビデオをご覧ください。 
VEXcode IQ には、さまざまなサンプル プロジェクトが多数含まれています。 この探索ではそのうちの 1 つを使用します。 サンプル プロジェクトの使用に関するヘルプとヒントについては、「サンプルとテンプレートの使用」チュートリアルを参照してください。
次に、「繰り返しアクション」サンプル プロジェクトを開きます。 ![VEXcode IQ の [ファイル] メニューの [サンプルを開く] オプションの画像](/stemlabs/sites/default/files/inline-images/IQ%20Open%20Examples.png)
プログラマは次の手順を実行する必要があります:
- 「ファイル」メニューを開きます。
- を選択します。例を開きます。
- アプリケーションの上部にあるフィルター バーを使用して、[コントロール] を選択します。
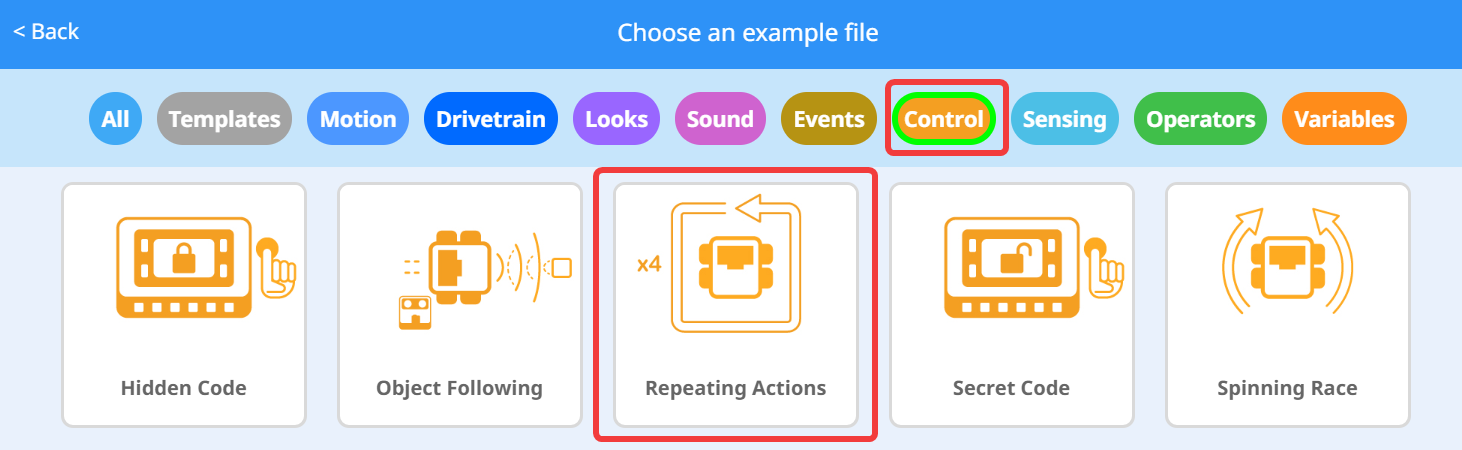
- 繰り返しアクション サンプル プロジェクトを選択して開きます。
- プロジェクトを「繰り返しアクション」として保存します。

- プロジェクト名「Repeating Actions」がツールバーの中央のウィンドウに表示されていることを確認します。
このプロジェクトは実際に何を行っているのでしょうか? 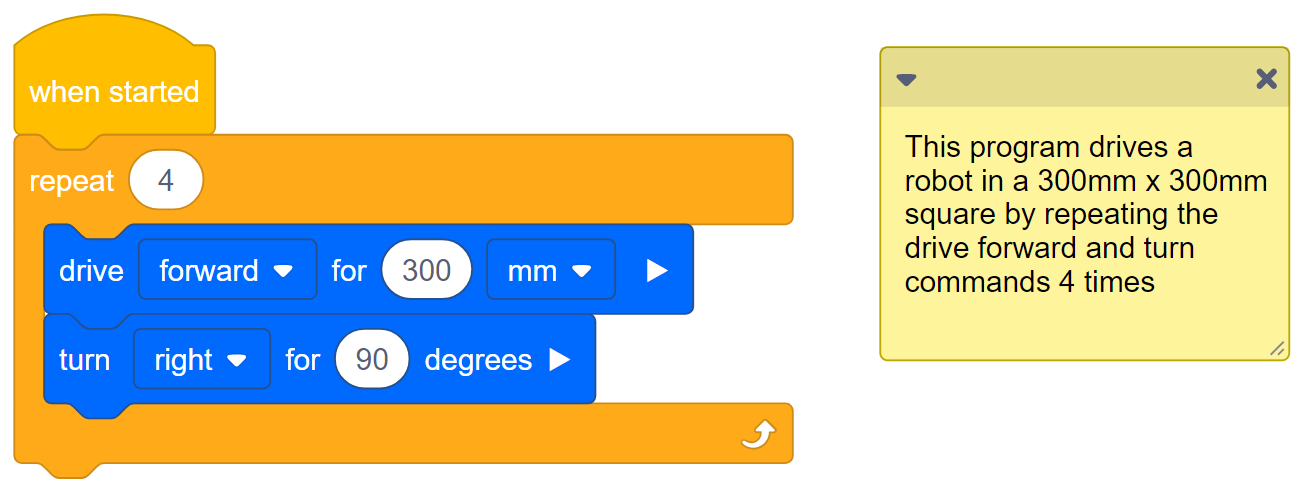
エンジニアリング ノートブックで次の操作を実行します。
プロジェクトで Clawbot が何をするかを予測します。 ロボットが実行するすべてのアクションを説明します。
![]() 教師用ツールボックス
~
の答え
教師用ツールボックス
~
の答え
教室でのディスカッションを促進し、このプロジェクトで何が起こると予測したかをエンジニアリング ノートに記入して生徒に共有してもらいます。
答えはさまざまですが、生徒たちは、このプロジェクトではロボットが 300 ミリメートル前進し、その後 90 度右折して正方形を完成させることを 4 回行うことを指摘する必要があります。 同じ 2 つのブロックを 4 回使用する代わりに、repeat ブロックは 8 つのブロックと同じアクションを 3 つのブロックに減らします。 生徒の予測には、8 つの行動すべてをリストする必要があります。 繰り返しブロックは、前進して曲がるという動作を繰り返します。
学生のエンジニアリング ノートは、個別に (Google / .docx / .pdf) またはチームとして (Google / .docx / .pdf) 管理して採点することができます。 前のリンクでは、アプローチごとに異なるルーブリックが提供されています。 教育計画にルーブリックが含まれる場合は、活動を開始する前にルーブリックについて説明するか、少なくともコピーを生徒に渡すことをお勧めします。
![]() 教師へのヒント
教師へのヒント
-
生徒が [ファイル] メニューから Open Examples を選択していることを確認します。
-
生徒が 繰り返しアクション サンプル プロジェクト」を選択していることを確認します。 Open Examples ページにはいくつかの選択肢があることを生徒に指摘できます。 学習中にいつでも「例とテンプレートの使用」チュートリアルを参照できることを生徒に伝えます。
-
学生に自分のイニシャルまたはグループ名をプロジェクト名に追加するように依頼できます。 学生にプログラムの提出を求める場合、これはプログラムを区別するのに役立ちます。
-
VEXcode IQ には自動保存があるため、プロジェクトを再度保存する必要はありません。
![]() 教師へのヒント
教師へのヒント
-
生徒が [ファイル] メニューから Open Examples を選択していることを確認します。
-
生徒が 繰り返しアクション サンプル プロジェクト」を選択していることを確認します。 Open Examples ページにはいくつかの選択肢があることを生徒に指摘できます。 学習中にいつでも「例とテンプレートの使用」チュートリアルを参照できることを生徒に伝えます。
-
学生に自分のイニシャルまたはグループ名をプロジェクト名に追加するように依頼できます。 学生にプログラムの提出を求める場合、これはプログラムを区別するのに役立ちます。
-
VEXcode IQ には自動保存があるため、プロジェクトを再度保存する必要はありません。
ステップ 3: [永久] と [繰り返し] の違いは何ですか?
-
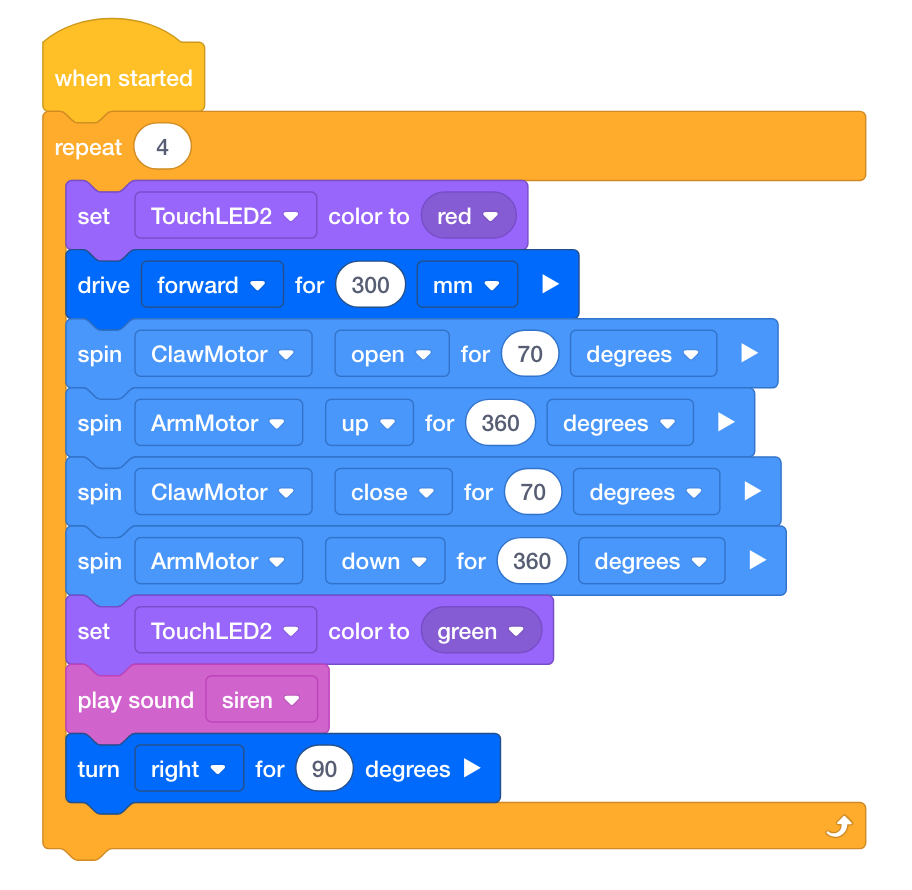
繰り返しアクションのサンプル プロジェクト をもう一度見てください。 右上に示されているブロックの積み重ねでもあります。
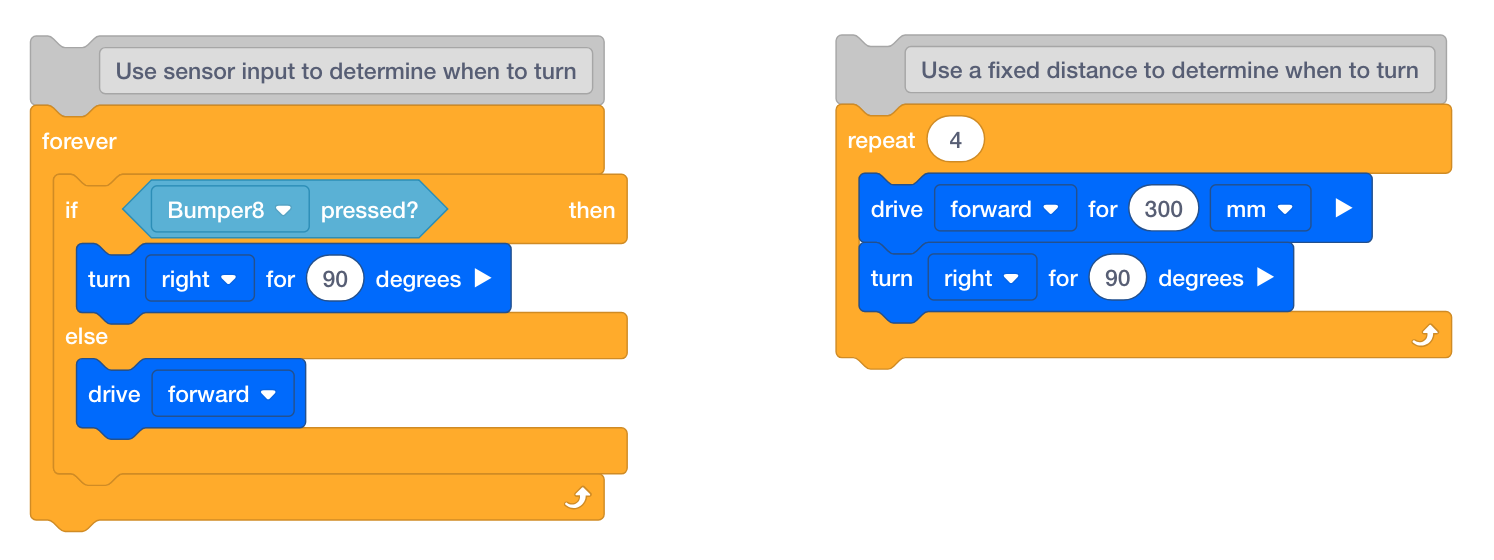
[Repeat] ブロックには、動作が 4 回繰り返されるだけであることに注意してください。 反復動作を永久に繰り返す必要があることはほとんどないため、特定の回数だけ反復する必要がある場合は、 [繰り返し] ブロックが使用されます。[繰り返し] ブロックを [永遠] ブロックに置き換えると、ロボットは正方形を永遠に繰り返すだけになります。
-
[Forever] ブロックは、条件が true であるかどうかを継続的にチェックするために、条件ステートメントでよく使用されます。 [Forever] ブロックに取り付けられた上記のブロックのスタックで、バンパー スイッチで何かにぶつかる条件を満たすまでロボットが前進する様子に注目してください。 バンパースイッチを押すとロボットが回転します。 それ以外の場合は、前進を続けます。
[Forever] ブロックの実践的な使用例です。 何かにぶつかるまで前進し続け、その後方向転換する自動運転の掃除機を想像してみてください。
![]() 学習の幅を広げる
学習の幅を広げる
条件付きループの使用方法をさらに詳しく調べるには、Floor Sweeter プロジェクトを構築します。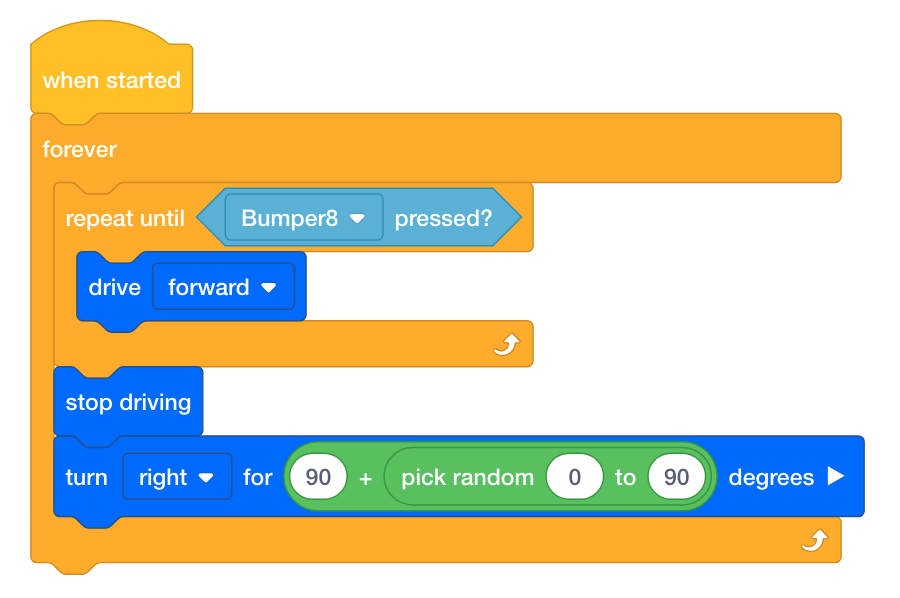
- 生徒に Clawbot (Drivetrain) サンプル プロジェクトを開いてもらいます。
- 生徒に上記のプロジェクトを構築するように指示します。
- 生徒たちにプロジェクトを「Floor Sweater」として保存してもらいます。

- 学生がプロジェクトの保存についてサポートが必要な場合は、「名前付けと保存」チュートリアルを参照してください。

生徒がブロックのいずれかについてサポートが必要な場合は、 ヘルプ 情報またはチュートリアルを参照してください。
生徒たちに、 プロジェクトをダウンロードして実行する して、ロボットがどのように動くかを観察してもらいます。 学生にサポートが必要な場合は、VEXcode IQ の「プロジェクトのダウンロードと実行」チュートリアルを参照してください。
次に、クラスでのディスカッションを開始し、 [繰り返し] ブロックの代わりに [永遠] ブロックが使用された理由を生徒に説明してもらいます。
このプロジェクトではバンパー スイッチが押されているかどうかを継続的に確認するため、学生は [永遠] ブロックが使用されていることに注意してください。
ステップ 4: ストップ アンド ゴー チャレンジ!
- Clawbot に広場を走行させます。
- 各ターン前:
- 爪は開閉する必要があります。
- 腕を上げ下げする必要があります。
- タッチ LED は少なくとも 1 つの色を表示する必要があります。
- 少なくとも 1 つのサウンドを再生する必要があります。
- Clawbot は、広場の一辺に沿って複数回走行することはできません。
- 開始点として繰り返しアクションのサンプル プロジェクトを使用できますが、変更を加える前にそれを StopAndGo として保存します。

エンジニアリング ノートブックで、次のことを計画します。
![]() ディスカッションの動機付け
-
活動の振り返り
ディスカッションの動機付け
-
活動の振り返り
Q: クローボットは期待通りに動きましたか?
A: 答えはさまざまです。ただし、この質問の目的は、認知的思考を促進することです。 学生たちは、行動をテストする前に行動を予測し、その結果を文書化し、振り返ることから始めました。
Q: 反復アクションのサンプル プロジェクトに加えてアームと爪を動かす際の最大の課題は何ですか?
A: 答えはさまざまですが、一般的な答えは、生徒が爪を何度開閉するか、またアームを何度上下に動かすかをテストする必要があるというものです。
Q: リピートを使用するとプロジェクトの効率がどのように向上しますか?
A: [Repeat] ループがないと、Clawbot はプロジェクト内のブロックによって決定された動作を 1 回だけ実行します。 [Repeat] ループは、Clawbot にすべてのブロックを 4 回実行して正方形を形成するように指示します。