
การตั้งโปรแกรมลูปใน VEXcode IQ
![]() กล่องเครื่องมือครู
-
วัตถุประสงค์ของกิจกรรมนี้
กล่องเครื่องมือครู
-
วัตถุประสงค์ของกิจกรรมนี้
การเขียนโปรแกรมพฤติกรรมซ้ำๆสามารถทำได้โดยใช้ [Repeat] หรือ [Forever] ลูป ในระยะสั้นบล็อก [ทำซ้ำ] อนุญาตให้โปรแกรมเมอร์กำหนดจำนวนครั้งเฉพาะสำหรับบล็อกภายในลูปที่จะทำซ้ำ บล็อก [Forever] จะทำซ้ำบล็อกภายในลูปตลอดไปหรือจนกว่าโครงการจะหยุดลง ในกิจกรรมนี้นักเรียนจะได้เรียนรู้เกี่ยวกับทั้งสองอย่าง
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการเขียนโปรแกรมด้วยลูป [Repeat] หรือ [ Forever] โปรดไปที่ข้อมูล ความช่วยเหลือ ภายใน VEXcode IQ
ต่อไปนี้เป็นโครงร่างของสิ่งที่นักเรียนจะทำในกิจกรรมนี้:
-
ดูวิดีโอ แนะนำ การใช้ลูป
-
สำรวจโครงการตัวอย่างการกระทำซ้ำ
-
เปรียบเทียบและเปรียบเทียบระหว่างบล็อก [Forever] และ [Repeat]
-
ทำการท้าทาย Squared Loops ที่ขอให้นักเรียนขยับ Clawbot ในรูปสี่เหลี่ยมจัตุรัสและดำเนินการกับกรงเล็บและแขนก่อนการหมุนแต่ละครั้ง
สำหรับความช่วยเหลือในการจัดระเบียบนักเรียนสำหรับกิจกรรมนี้คลิก ที่นี่ (Google /.docx /.pdf)
Builder ในแต่ละกลุ่มควรได้รับฮาร์ดแวร์ที่ต้องการ ผู้บันทึกควรได้รับสมุดบันทึกวิศวกรรมของกลุ่ม โปรแกรมเมอร์ควรเปิด VEXcode IQ
| จำนวน | วัสดุที่จำเป็น |
|---|---|
| 1 |
VEX IQ Super Kit |
| 1 |
VEXcode IQ |
| 1 |
สมุดบันทึกวิศวกรรม |
| 1 |
การใช้ลูป (บทแนะนำ) |
| 1 |
โครงการตัวอย่างการดำเนินการซ้ำ |
กิจกรรมนี้จะให้เครื่องมือในการเขียนโปรแกรมหุ่นยนต์ของคุณด้วยพฤติกรรมซ้ำๆ
คุณสามารถใช้ข้อมูลความช่วยเหลือภายใน VEXcode IQ เพื่อเรียนรู้เกี่ยวกับบล็อก
สำหรับคำแนะนำในการใช้ คุณลักษณะ ความช่วยเหลือโปรดดูบทแนะนำการใช้ความช่วยเหลือ
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
หากนี่เป็นครั้งแรกที่นักเรียนใช้ VEXcode IQ
พวกเขายังสามารถดูบทช่วยสอนในแถบเครื่องมือเพื่อเรียนรู้ทักษะพื้นฐานอื่นๆ 
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
สร้างแบบจำลองแต่ละขั้นตอนการแก้ไขปัญหาสำหรับนักเรียน เตือนนักเรียนว่าแต่ละกลุ่มมีคนทำหน้าที่เป็นผู้สร้าง บุคคลนั้นควรตรวจสอบรายการเหล่านี้เป็นประจำตลอดกิจกรรม
ขั้นตอนที่ 1: การเตรียมความพร้อมสำหรับกิจกรรม
ก่อนที่คุณจะเริ่มกิจกรรมคุณมีไอเท็มแต่ละรายการเหล่านี้พร้อมหรือยัง? ผู้สร้างควรตรวจสอบแต่ละข้อต่อไปนี้:
- มอเตอร์และเซ็นเซอร์ทั้งหมดเสียบเข้ากับพอร์ตที่ถูกต้องหรือไม่?
- สายเคเบิลอัจฉริยะเสียบ เข้ากับมอเตอร์และเซ็นเซอร์ทั้งหมดหรือไม่?
- สมอง เปิดอยู่หรือเปล่า?
- มีการ ชาร์จแบตเตอรี่หรือไม่?
- วิทยุถูกแทรกเข้าไปในสมองของหุ่นยนต์หรือไม่?
ขั้นตอนที่ 2: มาเริ่มเขียนโปรแกรมด้วยลูป
เริ่มต้นด้วยการดู วิดีโอ การใช้ลูปสอนใน VEXcode IQ 
VEXcode IQ มีโครงการตัวอย่างที่แตกต่างกันมากมาย คุณจะใช้หนึ่งในนั้นในการสำรวจครั้งนี้
สำหรับความช่วยเหลือและเคล็ดลับในการใช้โปรเจกต์ตัวอย่างโปรดดูบทแนะนำการใช้ตัวอย่างและเทมเพลต
จากนั้นเปิดโครงการตัวอย่างการกระทำซ้ำ 
โปรแกรมเมอร์ควรทำตามขั้นตอนต่อไปนี้:
- เปิดเมนูไฟล์
- เลือกตัวอย่าง แบบเปิด
- ใช้แถบตัวกรองที่ด้านบนของแอปพลิเคชันและเลือก 'การควบคุม'
- เลือกและเปิดโครงการ ตัวอย่างการดำเนินการ ซ้ำ
- บันทึกโปรเจกต์ของคุณเป็น 'การทำซ้ำ'

- ตรวจสอบให้แน่ใจว่าชื่อโปรเจกต์ 'การทำซ้ำ' อยู่ในหน้าต่างตรงกลางของแถบเครื่องมือแล้ว
โปรเจกต์นี้กำลังทำอะไรอยู่? 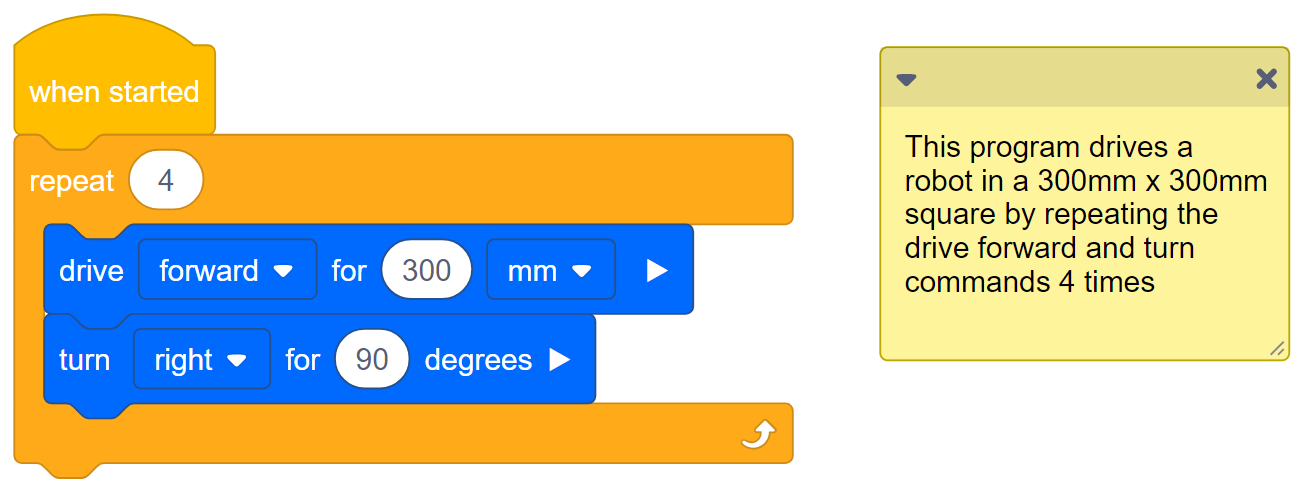
ทำสิ่งต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ:
คาดการณ์ว่าโปรเจกต์นี้จะให้ Clawbot ทำอะไร อธิบายทุกการกระทำที่หุ่นยนต์จะทำ
![]() กล่องเครื่องมือครู
-
คำตอบ
กล่องเครื่องมือครู
-
คำตอบ
อำนวยความสะดวกในการอภิปรายในชั้นเรียนเพื่อให้นักเรียนแบ่งปันสิ่งที่พวกเขาคาดการณ์ว่าโครงการนี้จะทำในสมุดบันทึกวิศวกรรมของพวกเขา
คำตอบจะแตกต่างกันไปแต่นักเรียนควรชี้ให้เห็นว่าโครงการนี้จะให้หุ่นยนต์ขับเคลื่อนไปข้างหน้า 300 มิลลิเมตรแล้วเลี้ยวขวา 90 องศา 4 ครั้งเพื่อให้ได้สี่เหลี่ยมจัตุรัส แทนที่จะใช้ 2 บล็อกเดียวกัน 4 ครั้งบล็อกทำซ้ำจะลดการกระทำเดียวกันกับ 8 บล็อก - เป็น 3 บล็อก การคาดการณ์ของนักเรียนควรระบุพฤติกรรมทั้งแปดข้อ บล็อกทำซ้ำจะทำซ้ำการกระทำของการขับรถไปข้างหน้าแล้วเลี้ยว
สมุดบันทึกวิศวกรรมของนักศึกษาสามารถได้รับการดูแลและให้ คะแนน เป็น ราย บุคคล (Google /.docx /.pdf) หรือเป็น ทีม ( Google /.docx/.pdf) ลิงก์ก่อนหน้านี้ให้รูบริกที่แตกต่างกันสำหรับแต่ละวิธี เมื่อใดก็ตามที่มีรูบริกรวมอยู่ในการวางแผนการศึกษาเป็นแนวปฏิบัติที่ดีในการอธิบายรูบริกหรืออย่างน้อยก็ให้สำเนาแก่นักเรียนก่อนที่กิจกรรมจะเริ่มต้น
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกตัวอย่างที่ เปิด จากเมนูไฟล์
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโครงการ ตัวอย่างการกระ ทำซ้ำแล้ว ท่านสามารถชี้ให้นักเรียนเห็นว่ามีหลายตัวเลือกให้เลือกใน หน้าตัวอย่างที่ เปิดอยู่ เตือนนักเรียนว่าพวกเขาสามารถดูบทแนะนำการใช้ตัวอย่างและเทมเพลตได้ตลอดเวลาระหว่างการสำรวจ
-
ท่านอาจขอให้นักเรียนเพิ่มชื่อย่อหรือชื่อกลุ่มลงในชื่อโครงการ สิ่งนี้จะช่วยแยกความแตกต่างของโปรแกรมหากท่านขอให้นักเรียนส่ง
-
เนื่องจาก VEXcode IQ มีการบันทึกอัตโนมัติจึงไม่จำเป็นต้องบันทึกโครงการอีกครั้ง
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกตัวอย่างที่ เปิด จากเมนูไฟล์
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโครงการ ตัวอย่างการกระ ทำซ้ำแล้ว ท่านสามารถชี้ให้นักเรียนเห็นว่ามีหลายตัวเลือกให้เลือกใน หน้าตัวอย่างที่ เปิดอยู่ เตือนนักเรียนว่าพวกเขาสามารถดูบทแนะนำการใช้ตัวอย่างและเทมเพลตได้ตลอดเวลาระหว่างการสำรวจ
-
ท่านอาจขอให้นักเรียนเพิ่มชื่อย่อหรือชื่อกลุ่มลงในชื่อโครงการ สิ่งนี้จะช่วยแยกความแตกต่างของโปรแกรมหากท่านขอให้นักเรียนส่ง
-
เนื่องจาก VEXcode IQ มีการบันทึกอัตโนมัติจึงไม่จำเป็นต้องบันทึกโครงการอีกครั้ง
ขั้นตอนที่ 3: อะไรคือความแตกต่างระหว่าง [Forever] และ [Repeat]?
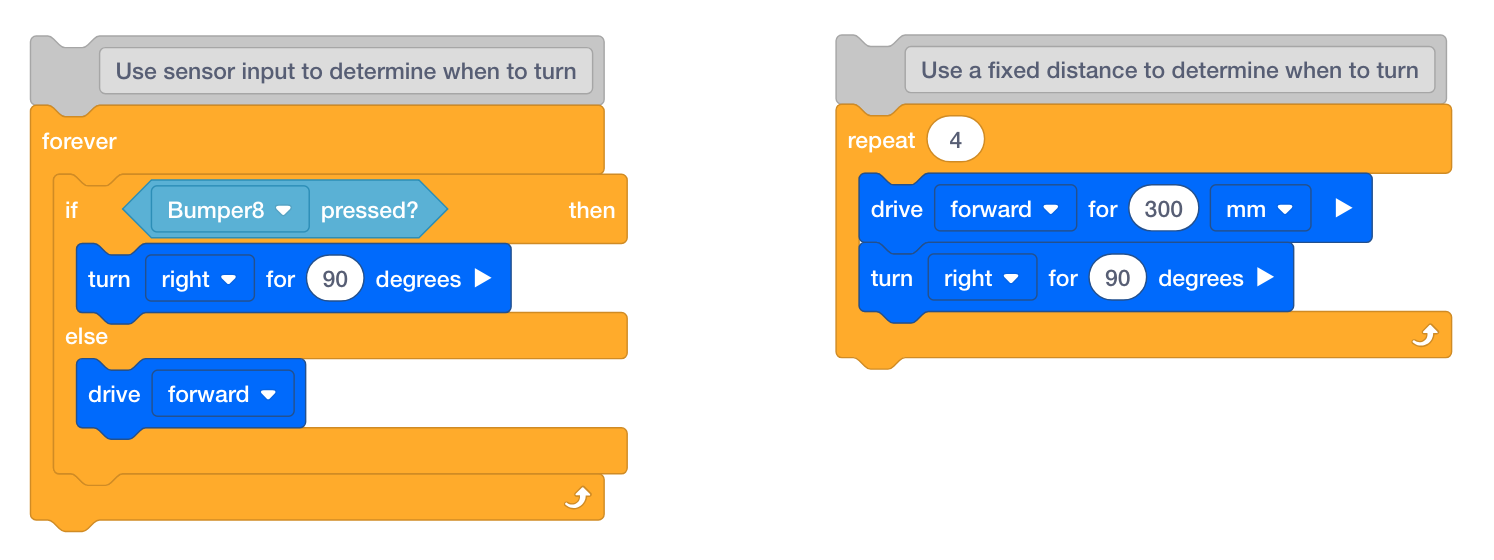
- ดูโปรเจ กต์ตัวอย่างการกระทำซ้ำ อีกครั้ง
นอกจากนี้ยังเป็นสแต็คของบล็อกที่แสดงทางด้านขวาข้างต้น
โปรดสังเกตว่าบล็อก [ทำซ้ำ] มีการเคลื่อนไหวซ้ำเพียง 4 ครั้งเท่านั้น การเคลื่อนไหวซ้ำๆแทบจะไม่จำเป็นต้องทำซ้ำตลอดไปดังนั้นจึงมีการใช้ บล็อก [ทำซ้ำ] เมื่อจำเป็นต้องทำซ้ำจำนวนหนึ่งเท่านั้น
หากบล็อก [ทำซ้ำ] ถูกแทนที่ด้วยบล็อก [ตลอดไป] หุ่นยนต์จะทำซ้ำในสี่เหลี่ยมจัตุรัสตลอดไป - บล็อก [Forever]
มักใช้กับข้อความที่มีเงื่อนไขเพื่อตรวจสอบอย่างต่อเนื่องเพื่อดูว่าเงื่อนไขนั้นเป็นจริงหรือไม่
ในกองบล็อกด้านบนที่ติดอยู่กับบล็อก [Forever]
ให้สังเกตว่าหุ่นยนต์จะขับเคลื่อนไปข้างหน้าอย่างไรจนกว่าจะตรงตามเงื่อนไขของการชนเข้ากับบางสิ่งด้วยสวิตช์กันชน
หากกดสวิตช์กันชนหุ่นยนต์จะหมุน
มิฉะนั้นมันจะยังคงเดินหน้าต่อไป
นี่เป็นกรณีการใช้งานจริงของบล็อก [Forever] ลองนึกภาพเครื่องกวาดพื้นแบบขับเคลื่อนด้วยตนเองที่ยังคงขับเคลื่อนไปข้างหน้าจนกว่าจะเจออะไรบางอย่างจากนั้นก็หมุน
![]() ขยายการเรียนรู้ของท่าน
ขยายการเรียนรู้ของท่าน
หากต้องการสำรวจเพิ่มเติมเกี่ยวกับการใช้ลูปที่มีเงื่อนไขให้สร้างโครงการเครื่องกวาดพื้น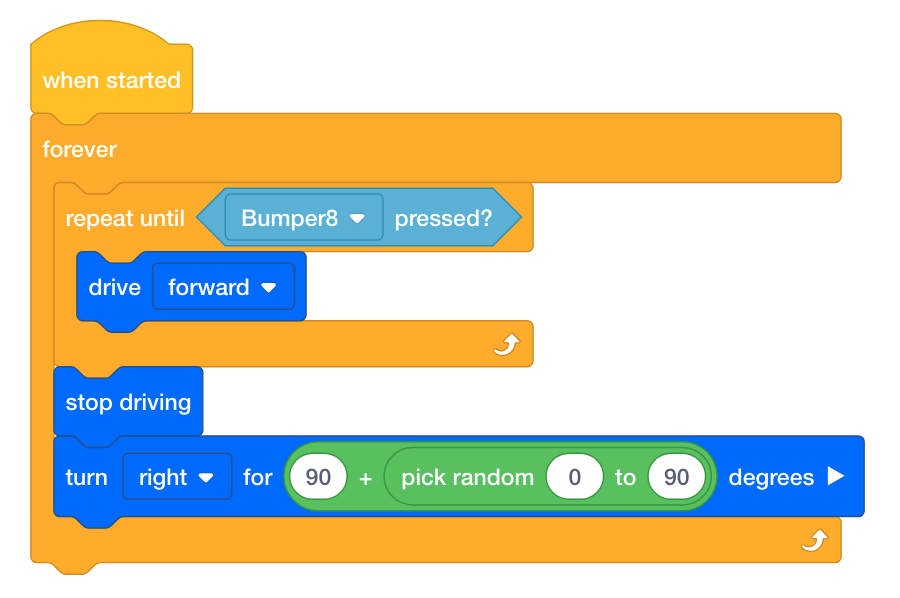
- ขอให้นักเรียนเปิดโครงการตัวอย่าง Clawbot (Drivetrain)
- ขอให้นักเรียนสร้างโครงการด้านบน
- ให้นักเรียนบันทึกโครงการเป็น 'เครื่องกวาดพื้น'

- หากนักเรียนต้องการความช่วยเหลือในการบันทึกโครงการโปรดดูบทช่วยสอนการตั้งชื่อและการบันทึก

หากนักเรียนต้องการความช่วยเหลือเกี่ยวกับบล็อคใดๆให้ดู ข้อมูล ความช่วยเหลือหรือบทช่วยสอน
ขอให้นักเรียน ดาวน์โหลดและเรียกใช้โครงการ เพื่อสังเกตว่าหุ่นยนต์เคลื่อนที่อย่างไร
หากนักเรียนต้องการความช่วยเหลือให้นำพวกเขาไปยังบทแนะนำการดาวน์โหลดและเรียกใช้โครงการใน
VEXcode
IQ
จากนั้นเริ่มการสนทนาในชั้นเรียนและขอให้นักเรียนอธิบายว่าเหตุใดจึงใช้บล็อค [Forever]
แทนบล็อค [Repeat] นักเรียน
ควรทราบว่ามีการใช้บล็อก [Forever]
เนื่องจากโครงการนี้จะตรวจสอบอย่างต่อเนื่องเพื่อดูว่ามีการกดสวิตช์กันชนหรือไม่
![]() กล่องเครื่องมือครู
-
การตั้งค่าความท้าทาย
กล่องเครื่องมือครู
-
การตั้งค่าความท้าทาย
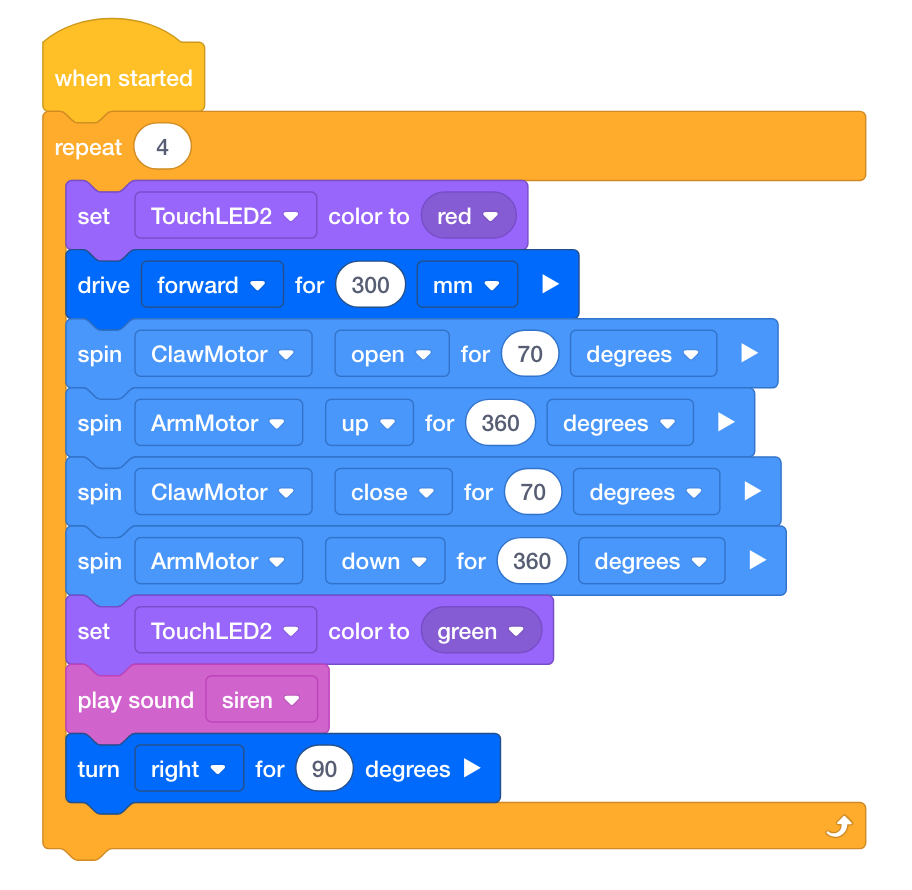
ขั้นตอนที่ 4: การท้าทาย Stop and Go!
- ให้ Clawbot ของคุณขับเป็นสี่เหลี่ยมจัตุรัส
- ก่อนเลี้ยวแต่ละครั้ง:
- กรงเล็บต้องเปิดและปิด
- ต้องยกแขนขึ้นและลง
- Touch LED ต้องแสดงอย่างน้อยหนึ่งสี
- ต้องเล่นอย่างน้อยหนึ่งเสียง
- Clawbot ไม่สามารถขับรถไปตามด้านข้างของจัตุรัสได้มากกว่าหนึ่งครั้ง
- คุณสามารถใช้โครงการตัวอย่างการกระทำซ้ำเป็นจุดเริ่มต้นแต่บันทึกเป็น
StopAndGo ก่อนทำการเปลี่ยนแปลงใดๆ

ในสมุดบันทึกวิศวกรรมของคุณให้วางแผนสิ่งต่อไปนี้:
- ให้ผู้ขับและผู้บันทึกวางแผนโซลูชันของคุณและคาดการณ์ว่าแต่ละบล็อกในโปรเจกต์ของคุณจะให้ Clawbot ทำอะไร
- ให้โปรแกรมเมอร์ดาว น์โหลดและเรียกใช้ โปรเจกต์ของคุณเพื่อทดสอบก่อนส่ง
- ให้ผู้สร้างทำการเปลี่ยนแปลงโครงการตามความจำเป็นและสื่อสารกับผู้บันทึกเพื่อจดบันทึกเกี่ยวกับสิ่งที่เปลี่ยนแปลงระหว่างการทดสอบ
![]() กล่องเครื่องมือครู
- การ
แก้ปัญหา
กล่องเครื่องมือครู
- การ
แก้ปัญหา
![]() กระตุ้นการอภิปราย
-
สะท้อนให้เห็นถึงกิจกรรม
กระตุ้นการอภิปราย
-
สะท้อนให้เห็นถึงกิจกรรม
ถาม: Clawbot เคลื่อนไหวตามที่คุณคาดไว้หรือไม่?
ตอบ: คำตอบจะแตกต่างกันไปอย่างไรก็ตามเป้าหมายของคำถามนี้คือการส่งเสริมการคิดทางปัญญา
นักเรียนเริ่มต้นด้วยการคาดการณ์พฤติกรรมก่อนทดสอบบันทึกผลลัพธ์และไตร่ตรอง
ถาม: ความท้าทายที่ยิ่งใหญ่ที่สุดในการเคลื่อนย้ายแขนและกรงเล็บนอกเหนือจากโครงการตัวอย่างการกระทำซ้ำคืออะไร?
ตอบ: แม้ว่าคำตอบอาจแตกต่างกันไปแต่คำตอบที่พบบ่อยคือนักเรียนอาจต้องทดสอบว่ากรงเล็บควรเปิดและปิดกี่องศาและแขนควรเลื่อนขึ้นและลงกี่องศา
ถาม: การใช้การทำซ้ำช่วยเพิ่มประสิทธิภาพของโครงการได้อย่างไร?
ตอบ: หากไม่มีลูป [ทำซ้ำ] Clawbot
จะดำเนินการตามพฤติกรรมที่กำหนดโดยบล็อกในโครงการเพียงครั้งเดียว ลูป [ทำซ้ำ] บอกให้
Clawbot ทำบล็อกทั้งหมด 4 ครั้งเพื่อสร้างสี่เหลี่ยมจัตุรัส