
STEM LabsVEX CTE
مقدمة للذراع سداسي المحاور
9 الوحدات
استكشف أتمتة المصنع مع VEX CTE: التعلم العملي في مجال العلوم والتكنولوجيا والهندسة والرياضيات في مجال الروبوتات والترميز لتطبيقات العالم الحقيقي.
وحدة 1
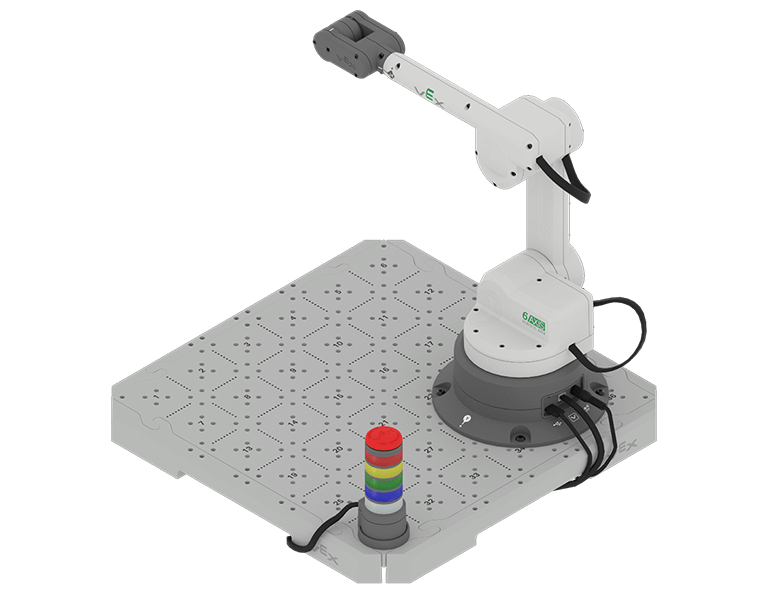
مقدمة في الأسلحة الروبوتية
قم بإعداد خلية عمل CTE VEX، واستكشف نظام الإحداثيات الديكارتية، وتعرف على كيفية استخدام الأسلحة الروبوتية في الصناعة.
وحدة 2
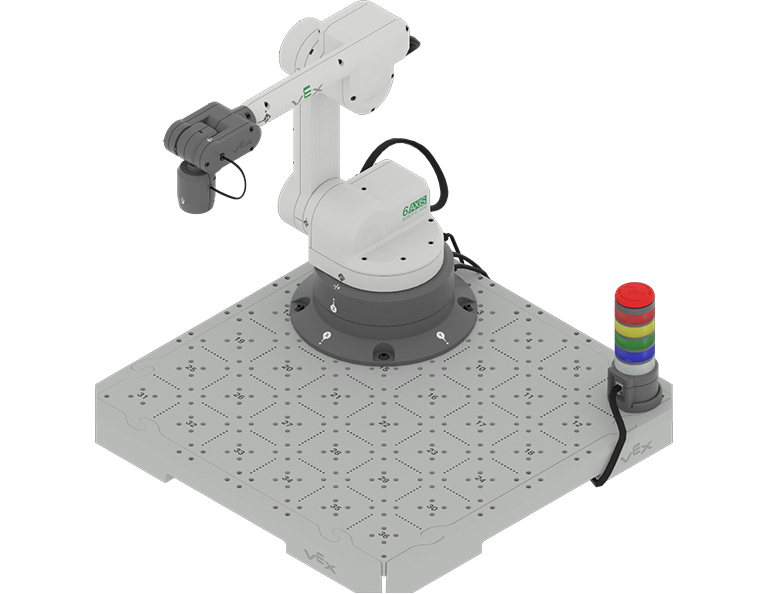
استخدام قلادة التدريس
استخدم قلادة Teach للتحكم في حركة الذراع الروبوتية سداسية المحاور أثناء التقاط الأقراص ووضعها على بلاط CTE.
وحدة 3
حركات الترميز
استخدم الترميز القائم على الكتلة لترميز الذراع الروبوتية المكونة من 6 محاور للتحرك على طول المحاور x و y و z ودمج تلك السلوكيات للانتقال إلى مواقع على لوحة CTE.
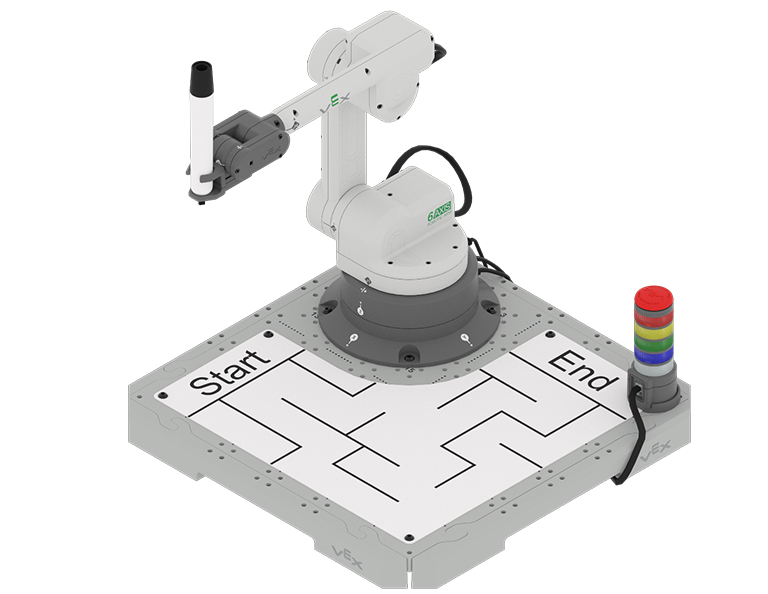
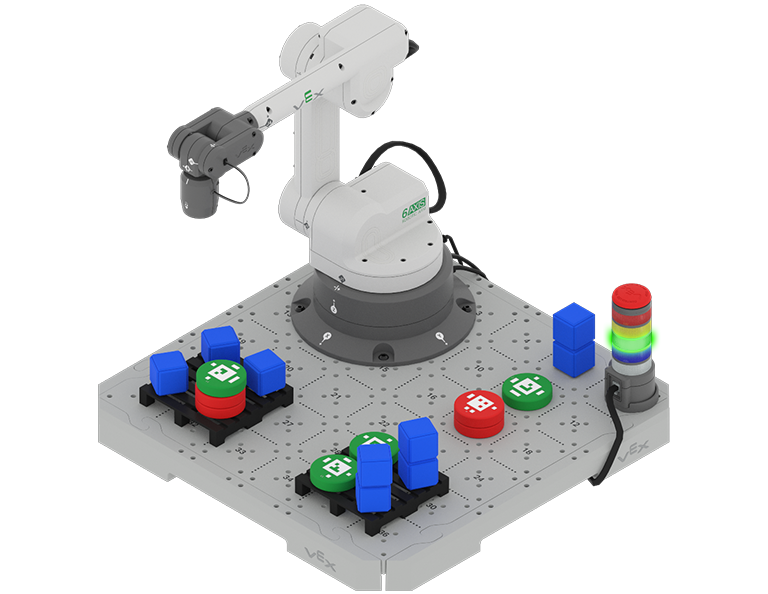
وحدة 4
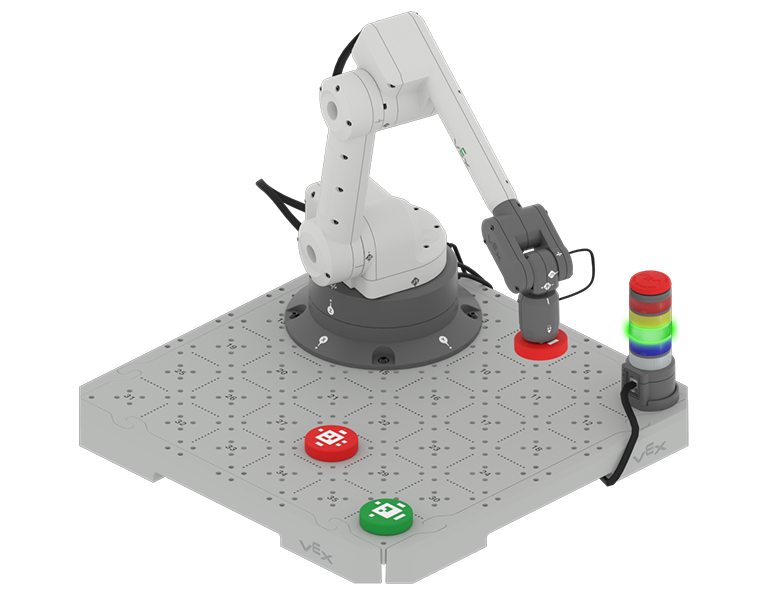
التحكم في المسار
قم بترميز خلية عمل CTE VEX لرسمها على السبورة البيضاء باستخدام القلم وتحريك العقبات على بلاط CTE.
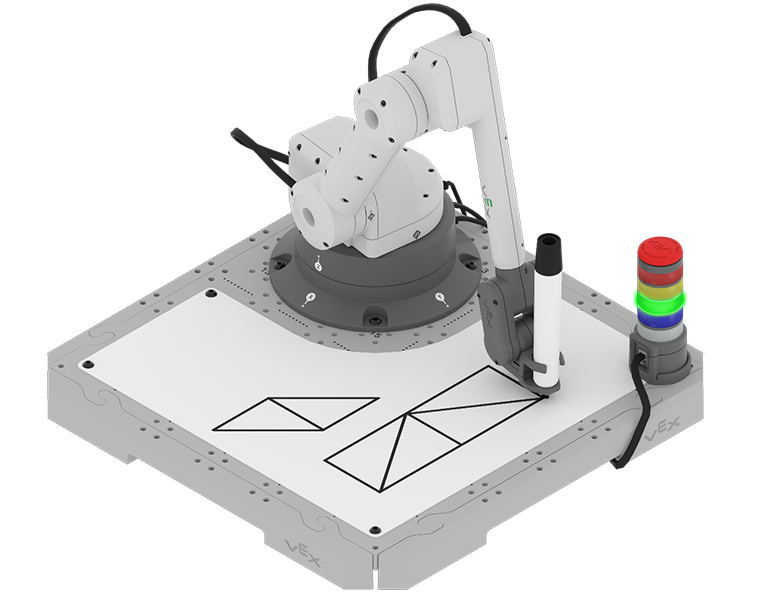
وحدة 5
ترميز الأشكال
استكشف كيف يتحرك الذراع الروبوتية المكونة من 6 محاور على طول المحاور x و y و z لرسم الأشكال.
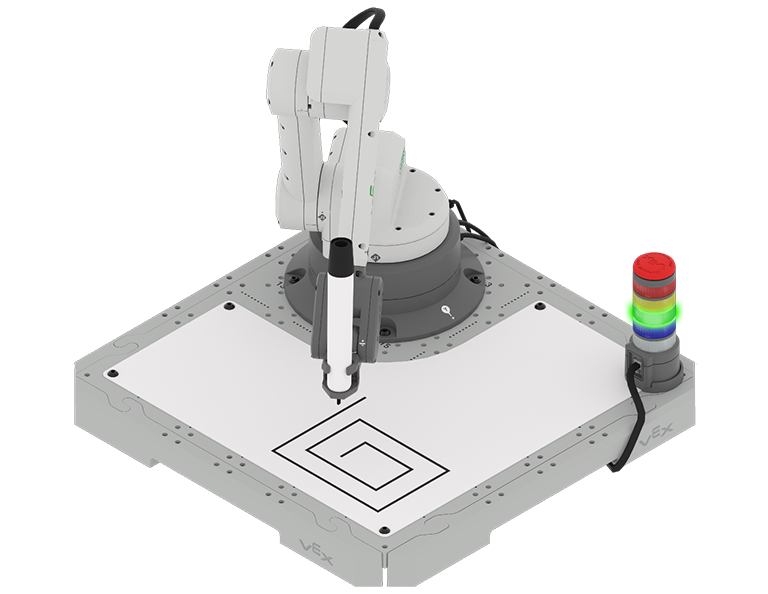
وحدة 6
الحركات المطلقة مقابل الحركات النسبية
تعلم كيفية ترميز الذراع الروبوتية ذات 6 محاور لاستخدام كل من الحركات المطلقة والنسبية لرسم الأشكال. ثم قم بعمل أشكال وأنماط أكثر تعقيدًا من خلال دمج المتغيرات وتكرار الحلقات.
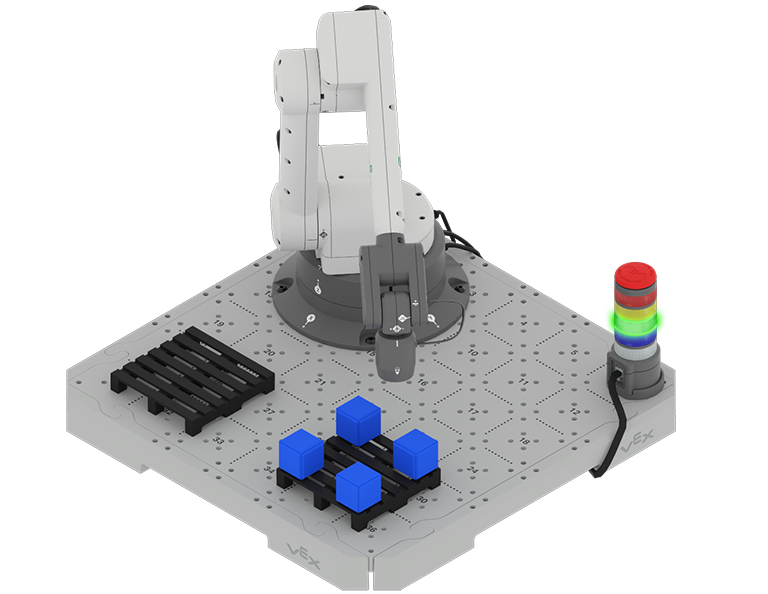
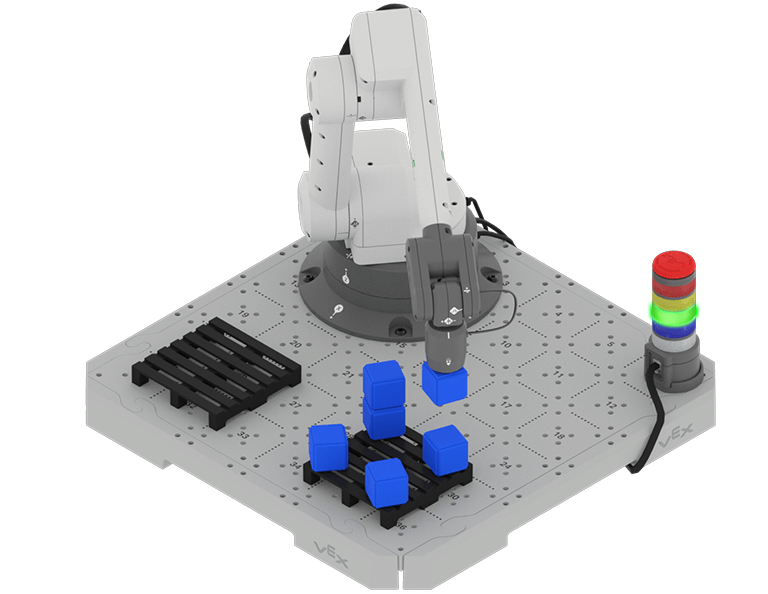
وحدة 7
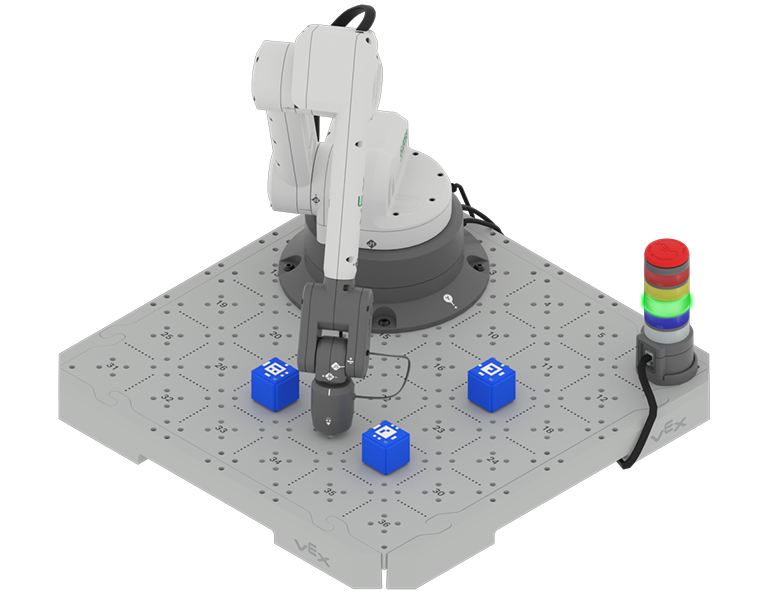
نقل الأشياء ووضعها على منصات نقالة
قم بترميز الذراع المكون من 6 محاور لالتقاط المكعب ووضعه على منصة نقالة. ثم استخدم المتغيرات وكتل If ثم لوضع مكعبات متعددة على المنصات.
وحدة 8
تكديس الكائنات
تعرف على كيفية وضع خطة لإكمال مهمة، ثم قم بترميز ذراع 6 محاور لوضع جميع المكعبات التسعة على المنصة النقالة.
كابستون
عملية التصميم الهندسي
طبق كل ما تعلمته حتى الآن لترميز ذراع 6 محاور لإكمال تحدي الكابستون!