
STEM LabsVEX CTE
6축 암 소개
9 단위
로봇 팔과 산업 자동화의 기본을 살펴보세요. 티치 펜던트를 사용하여 6축 로봇 팔을 설정하고 제어하는 방법을 배우고, 정밀한 움직임과 작업을 수행하도록 코딩합니다. 실습 활동과 코딩 과제를 통해 로봇 공학과 자동화에 대한 실질적인 기술을 습득하세요.
이 과정은 VEX CTE 6축 로봇팔이나 VEX CTE 워크셀 키트를 사용하여 수행할 수 있습니다.
단위 1
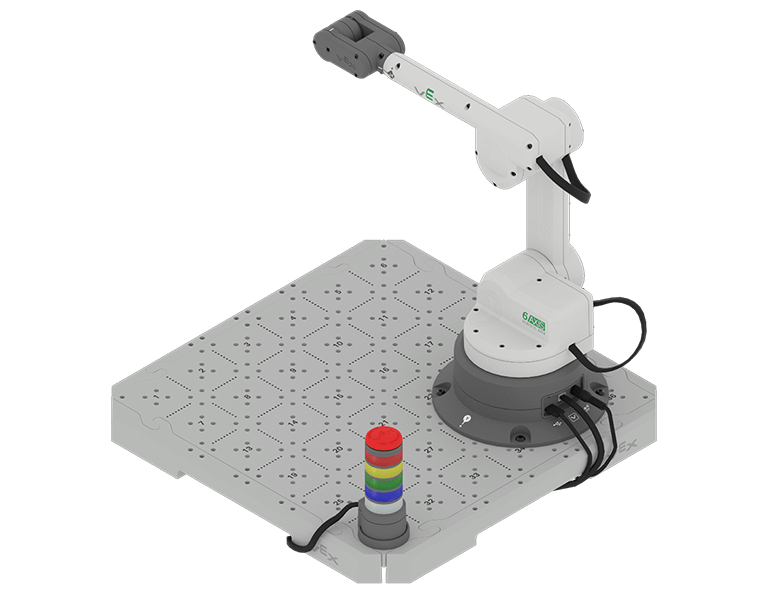
로봇 팔 소개
6축 로봇 팔을 설정하고, 데카르트 좌표계를 살펴보고, 로봇 팔이 산업에서 어떻게 사용되는지 알아보세요.
단위 2
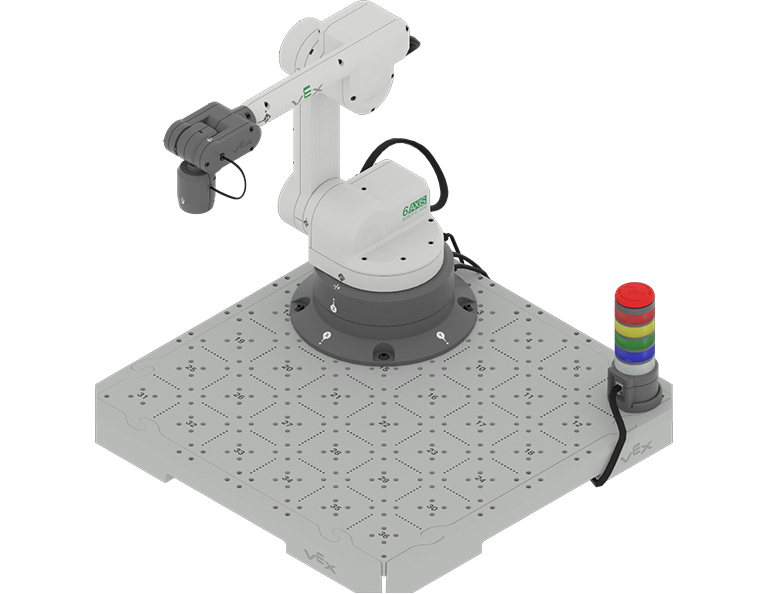
티치 펜던트 사용하기
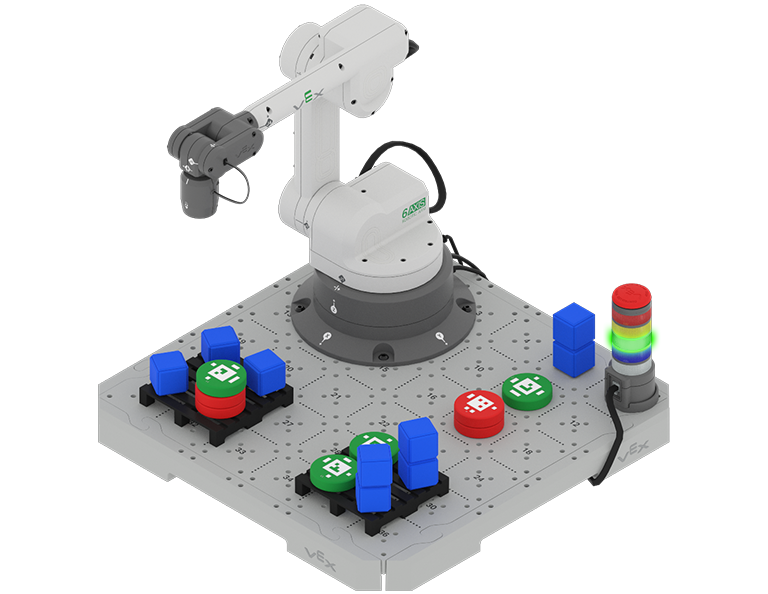
CTE 타일에 디스크를 집어 올리고 놓을 때 티치 펜던트를 사용하여 6축 로봇 팔의 움직임을 제어합니다.
단위 3
코딩 운동
블록 기반 코딩을 사용하여 6축 로봇 팔이 x, y, z축을 따라 움직이도록 코딩하고 이러한 동작을 결합하여 CTE 타일의 위치로 이동합니다.
단위 4
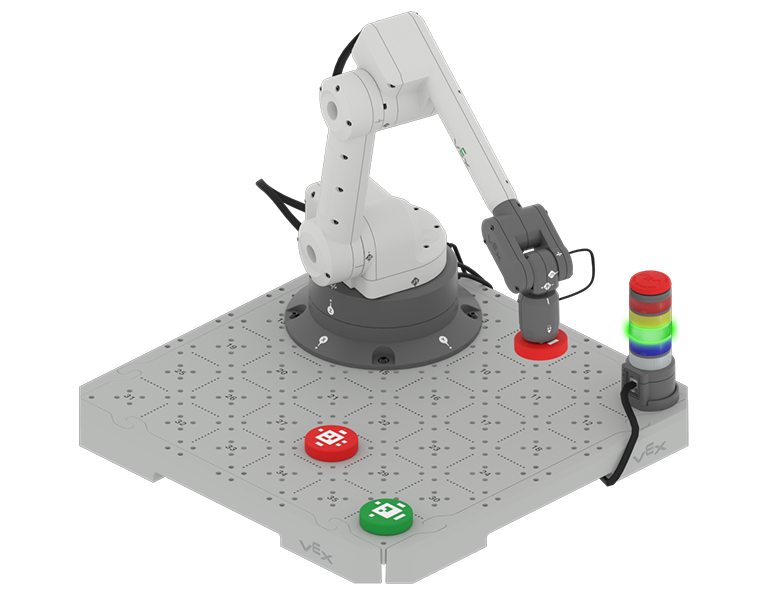
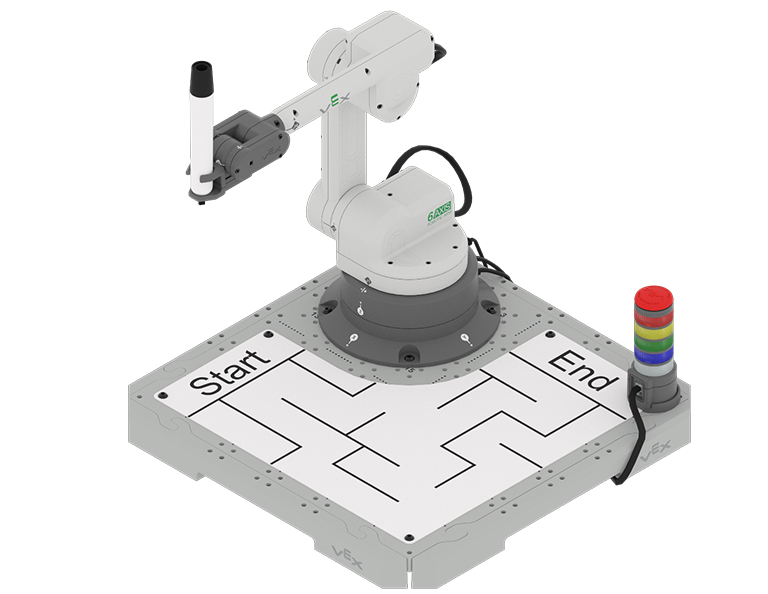
경로 제어
펜으로 화이트보드에 그림을 그리거나 CTE 타일의 장애물을 피해 이동하도록 6축 로봇팔을 코딩합니다.
단위 5
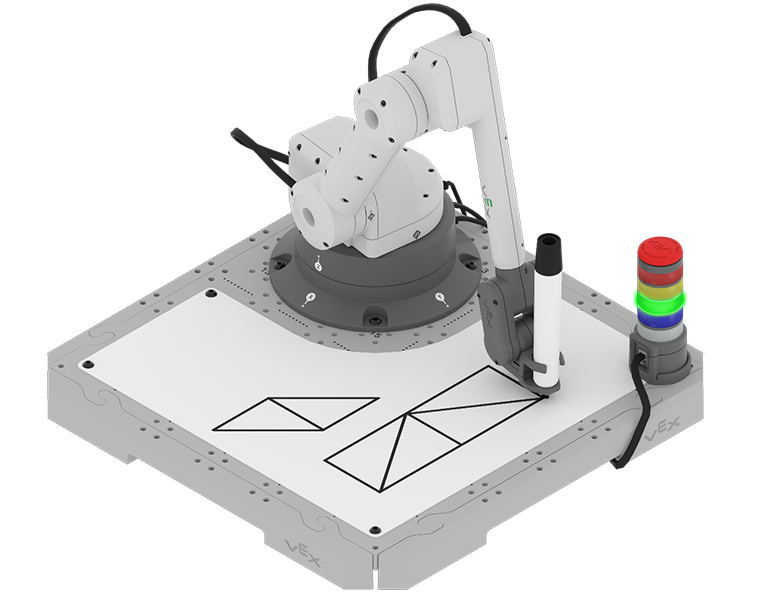
코딩 모양
6축 로봇팔이 x, y, z축을 따라 어떻게 움직여 모양을 그리는지 살펴보세요.
단위 6
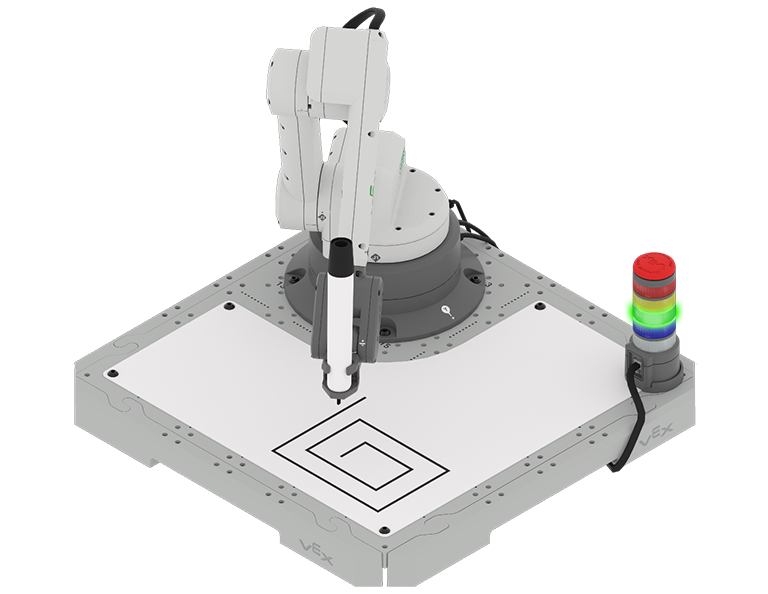
절대적 움직임과 상대적 움직임
절대적 움직임과 상대적 움직임을 모두 사용하여 모양을 그리는 6축 로봇 팔을 코딩하는 방법을 알아보세요. 그런 다음 변수와 Repeat 루프를 통합하여 더 복잡한 모양과 패턴을 만듭니다.
단위 7
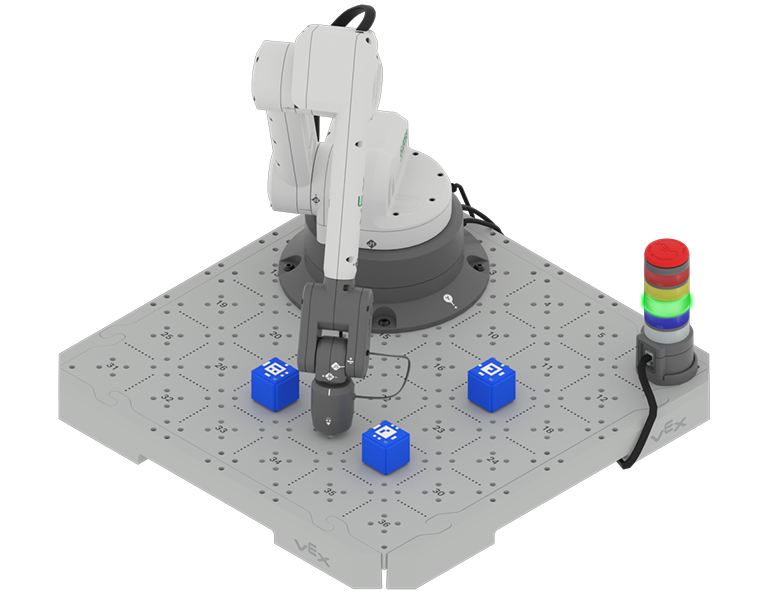
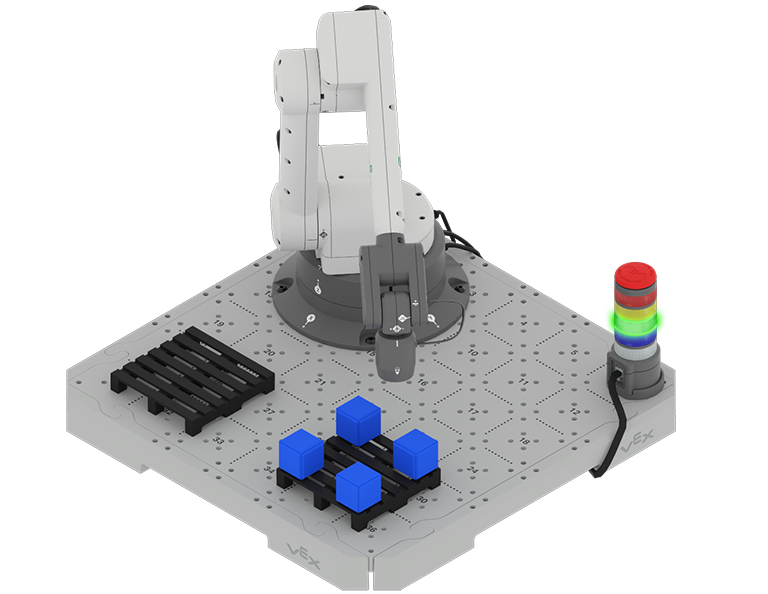
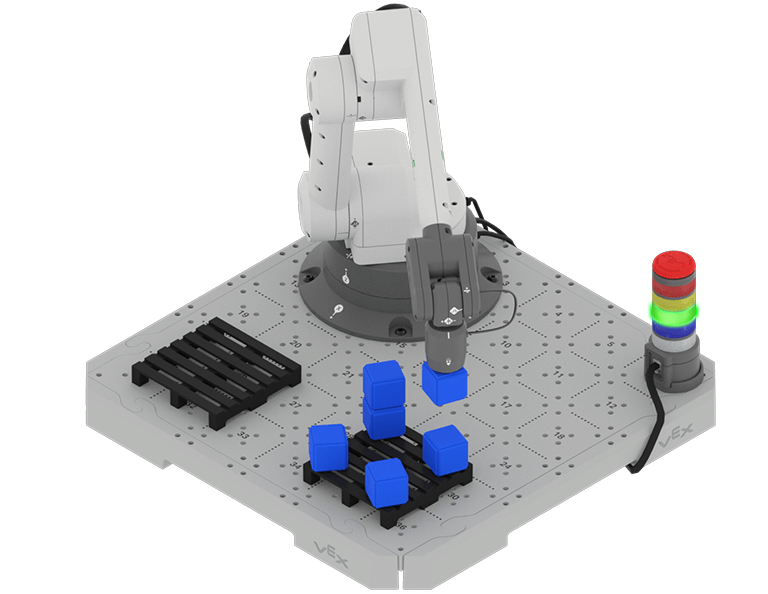
물체 운반 및 팔레타이징
6축 로봇팔에 팔레트 위에 큐브를 집어 올려 놓도록 코드를 작성합니다. 그런 다음 변수와 If then 블록을 사용하여 팔레트에 여러 개의 큐브를 놓습니다.
단위 8
객체 쌓기
작업을 완료하기 위한 계획을 세우는 방법과 6축 로봇 팔을 코딩하여 팔레트 위에 9개의 큐브를 모두 올려놓는 방법을 알아보세요.
관석
엔지니어링 설계 프로세스
지금까지 배운 모든 내용을 적용하여 6축 로봇팔을 코딩하고 Capstone Challenge를 완료하세요!