
STEM LabsVEX CTE
Giới thiệu về cánh tay 6 trục
9 Đơn vị
Khám phá những kiến thức cơ bản về cánh tay robot và tự động hóa công nghiệp. Học cách thiết lập và điều khiển Cánh tay robot 6 trục bằng Teach Pendant, sau đó lập trình để thực hiện các chuyển động và nhiệm vụ chính xác. Rèn luyện các kỹ năng thực tế về robot và tự động hóa thông qua các hoạt động thực hành và thử thách lập trình.
Khóa học này có thể được thực hiện bằng Cánh tay robot 6 trục VEX CTE hoặc Bộ dụng cụ Workcell VEX CTE.
Đơn vị 1
Giới thiệu về cánh tay robot
Thiết lập cánh tay robot 6 trục, khám phá hệ tọa độ Descartes và tìm hiểu về cách sử dụng cánh tay robot trong công nghiệp.
Đơn vị 2
Sử dụng mặt dây chuyền dạy học
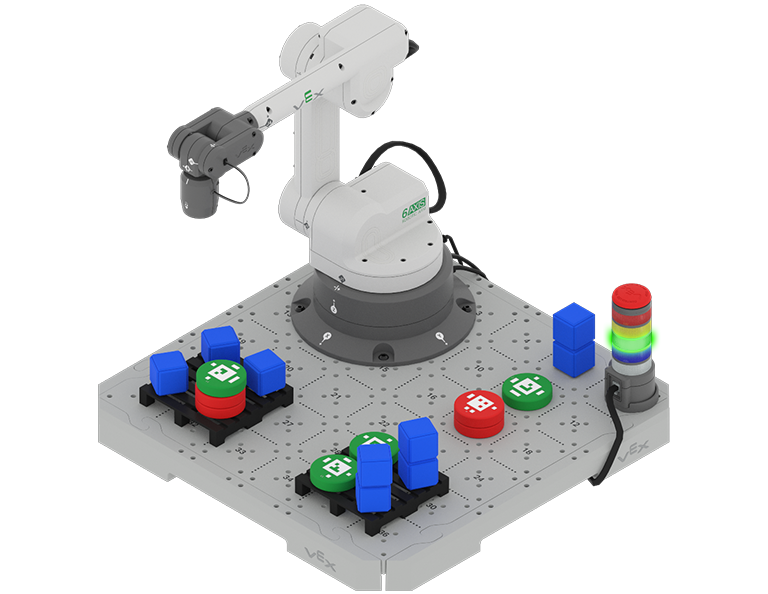
Sử dụng Mặt dây chuyền dạy để điều khiển chuyển động của Cánh tay robot 6 trục khi bạn nhặt và đặt Đĩa lên Ô CTE.
Đơn vị 3
Phong trào mã hóa
Sử dụng mã hóa theo khối để mã hóa Cánh tay rô-bốt 6 trục di chuyển dọc theo trục x, y và z và kết hợp các hành vi đó để di chuyển đến các vị trí trên Ô CTE.
Đơn vị 4
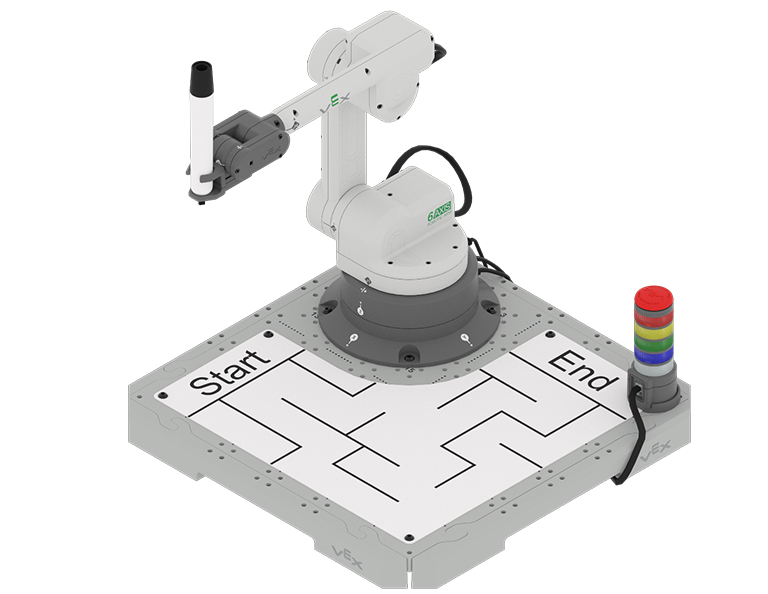
Kiểm soát Đường dẫn
Lập trình cho cánh tay robot 6 trục để vẽ trên bảng trắng bằng bút và di chuyển xung quanh các chướng ngại vật trên ô CTE.
Đơn vị 5
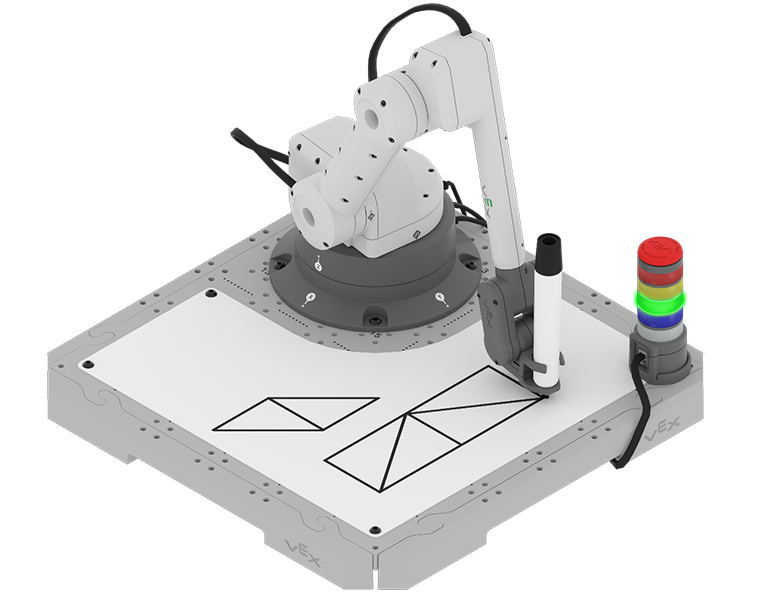
Mã hóa hình dạng
Khám phá cách cánh tay robot 6 trục di chuyển dọc theo trục x, y và z để vẽ các hình dạng.
Đơn vị 6
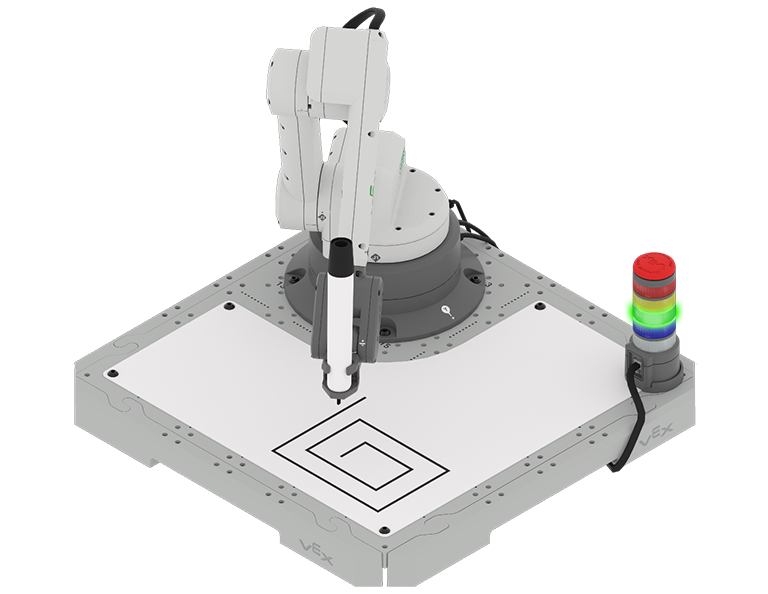
Chuyển động tuyệt đối so với chuyển động tương đối
Tìm hiểu cách lập trình Cánh tay robot 6 trục để sử dụng cả chuyển động tuyệt đối và tương đối để vẽ hình dạng. Sau đó tạo ra các hình dạng và mẫu phức tạp hơn bằng cách kết hợp các biến và vòng lặp lặp lại.
Đơn vị 7
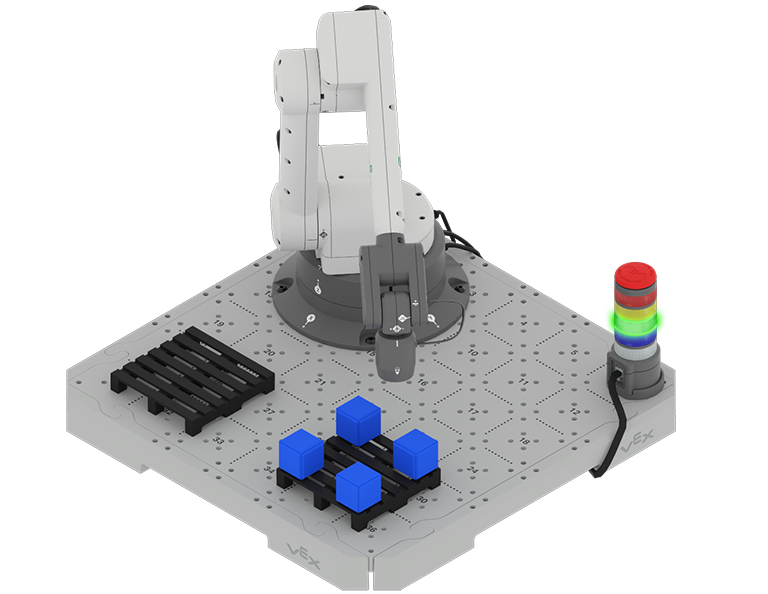
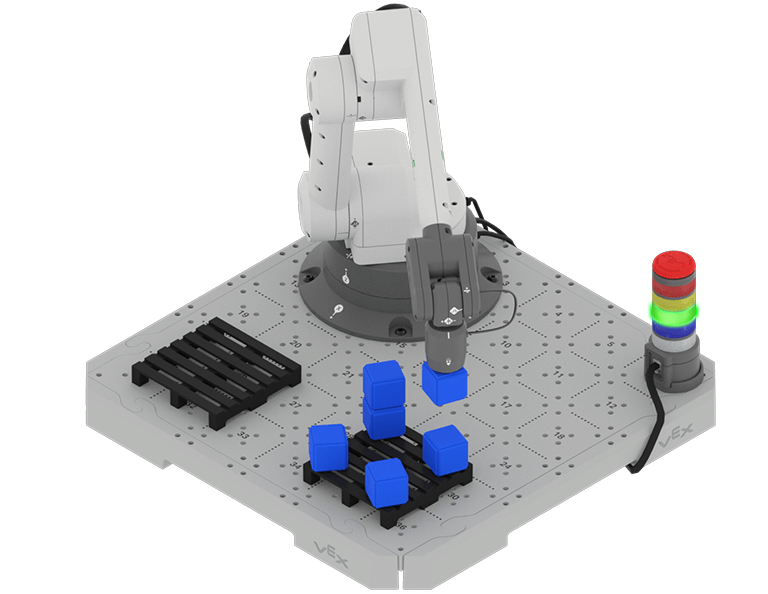
Vận chuyển và xếp pallet các vật thể
Lập trình cho cánh tay robot 6 trục để nhặt và đặt khối lập phương lên pallet. Sau đó sử dụng các biến và khối If then để đặt nhiều khối Cube vào pallet.
Đơn vị 8
Xếp chồng các đối tượng
Tìm hiểu cách lập kế hoạch để hoàn thành một nhiệm vụ, sau đó lập trình cho Cánh tay rô-bốt 6 trục để đặt cả chín khối lập phương lên pallet.
Đá tảng
Quy trình thiết kế kỹ thuật
Áp dụng mọi thứ bạn đã học được cho đến nay để lập trình Cánh tay robot 6 trục để hoàn thành Thử thách Capstone!