
STEM LabsVEX CTE
Introduction au bras à 6 axes
9 Unités
Explorez l'automatisation de l'usine avec VEX CTE : apprentissage pratique des STEM en robotique et codage pour des applications du monde réel.
Unité 1
Introduction aux bras robotisés
Configurez la cellule de travail CTE VEX, explorez le système de coordonnées cartésiennes et découvrez comment les bras robotiques sont utilisés dans l'industrie.
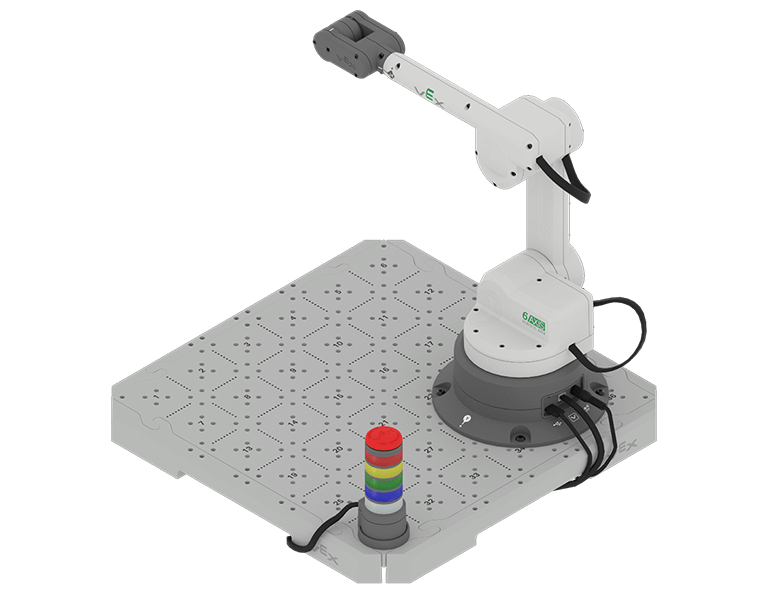
Unité 2
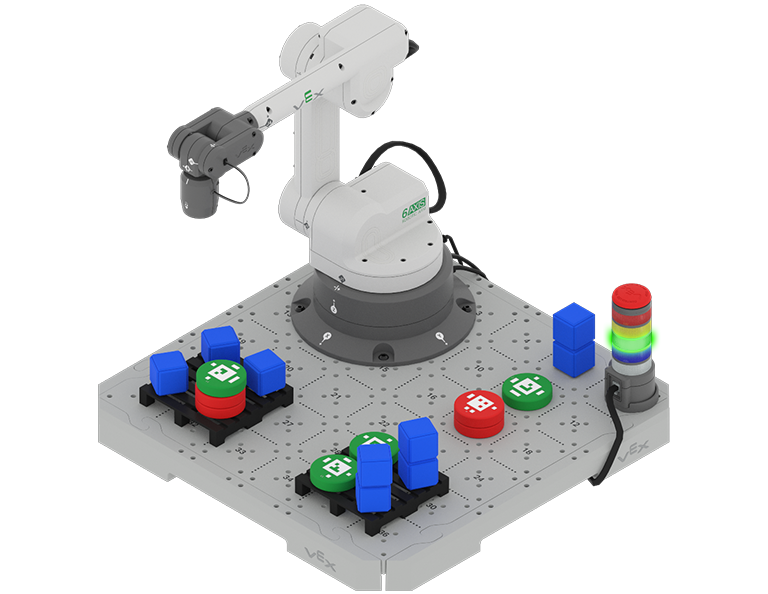
Utilisation du pendentif Teach
Utilisez la suspension Teach pour contrôler le mouvement du bras robotique à 6 axes lorsque vous prenez et placez des disques sur la tuile CTE.
Unité 3
Codage des mouvements
Utilisez le codage par blocs pour coder le bras robotique à 6 axes pour se déplacer le long des axes x, y et z et combinez ces comportements pour vous déplacer vers des emplacements sur la tuile CTE.
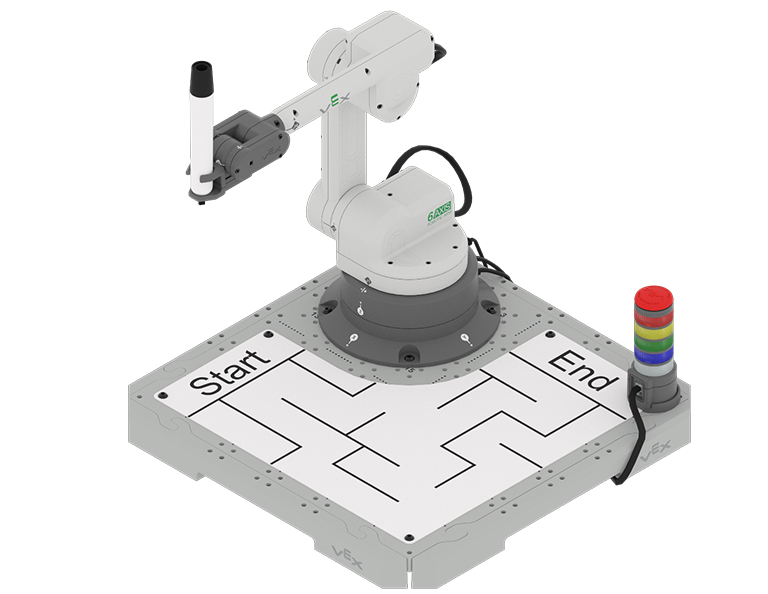
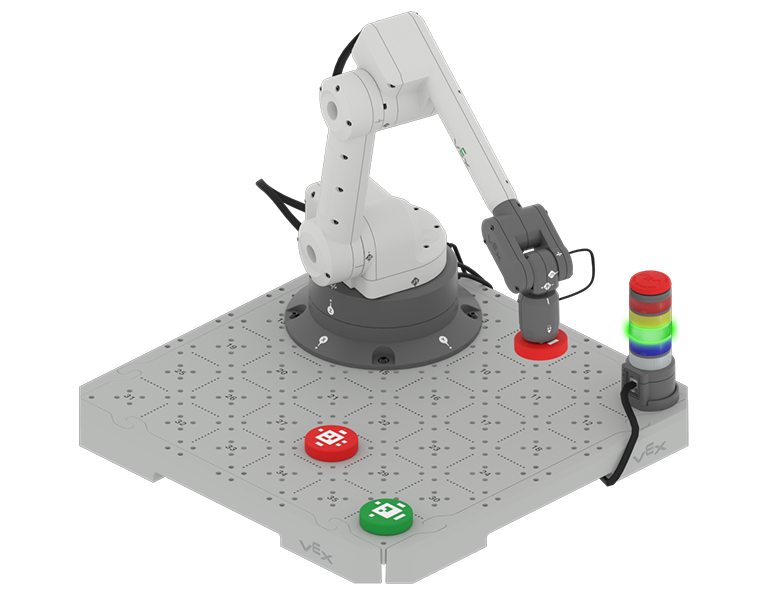
Unité 4
Contrôler le chemin
Codez la cellule de travail CTE VEX pour dessiner sur le tableau blanc avec le stylo et contourner les obstacles sur la tuile CTE.
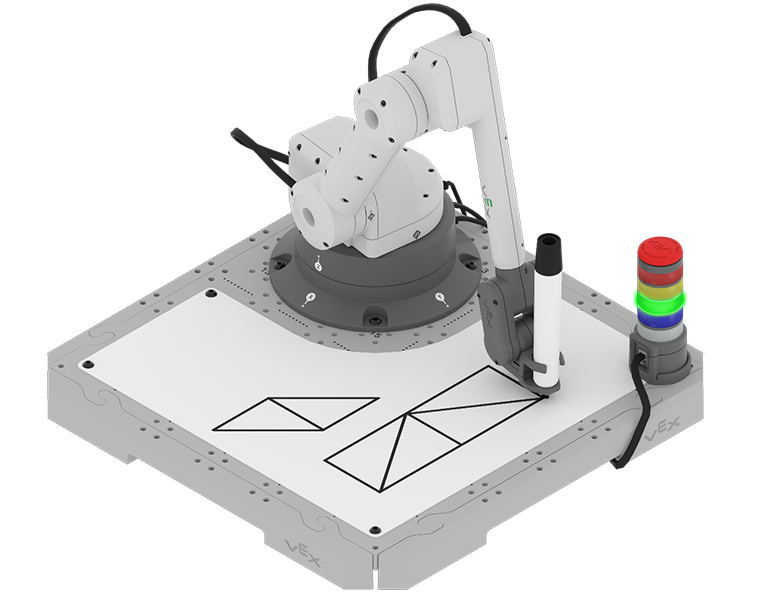
Unité 5
Formes de codage
Découvrez comment le bras robotique à 6 axes se déplace le long des axes x, y et z pour dessiner des formes.
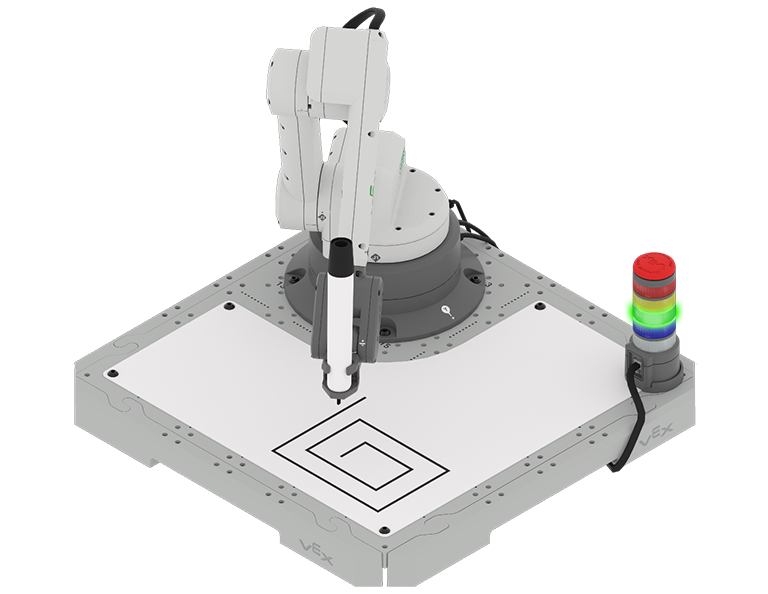
Unité 6
Mouvements absolus vs relatifs
Apprenez à coder le bras robotique à 6 axes pour utiliser à la fois des mouvements absolus et relatifs pour dessiner des formes. Créez ensuite des formes et des motifs plus complexes en incorporant des variables et des boucles de répétition.
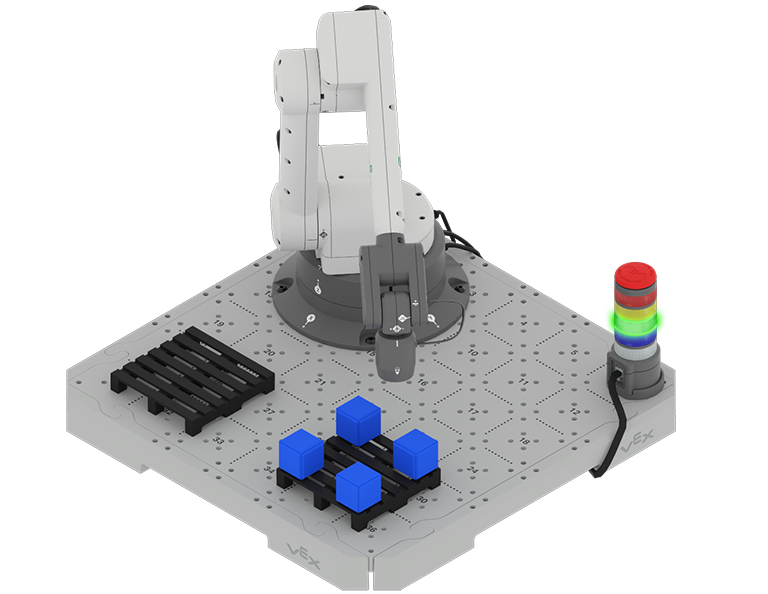
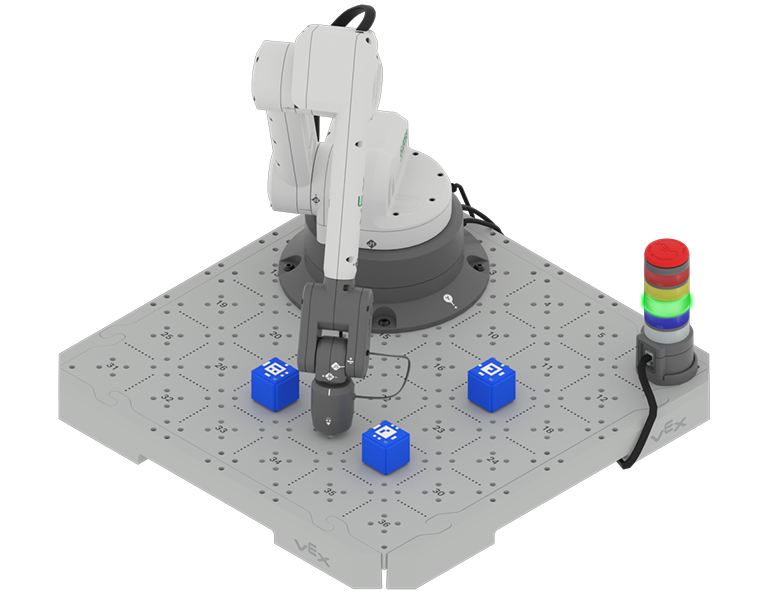
Unité 7
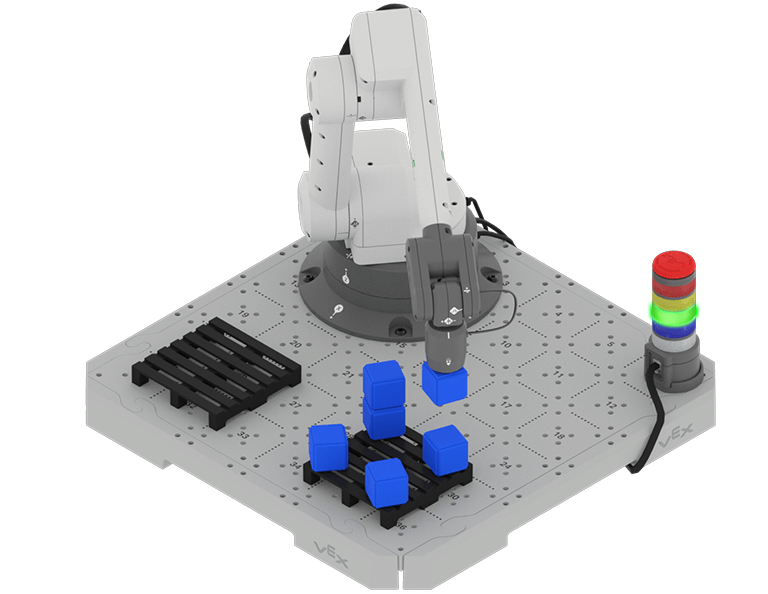
Transport et palettisation d'objets
Codez le bras à 6 axes pour choisir et placer un cube sur une palette. Ensuite, utilisez les variables et les blocs If then pour placer plusieurs cubes sur les palettes.
Unité 8
Empiler des objets
Apprenez à faire un plan pour effectuer une tâche, puis codez le bras à 6 axes pour placer les neuf cubes sur la palette.
Pierre de synthèse
Processus de conception technique
Appliquez tout ce que vous avez appris jusqu'à présent pour coder le bras à 6 axes afin de terminer le défi Capstone !