
STEM LabsVEX CTE
ความรู้เบื้องต้นเกี่ยวกับแขน 6 แกน
9 หน่วย
สำรวจระบบอัตโนมัติในโรงงานด้วย VEX CTE: การเรียนรู้ STEM แบบลงมือปฏิบัติจริงในด้านวิทยาการหุ่นยนต์และการเข้ารหัสสำหรับการใช้งานในโลกแห่งความเป็นจริง
หน่วย 1
ความรู้เบื้องต้นเกี่ยวกับแขนกล
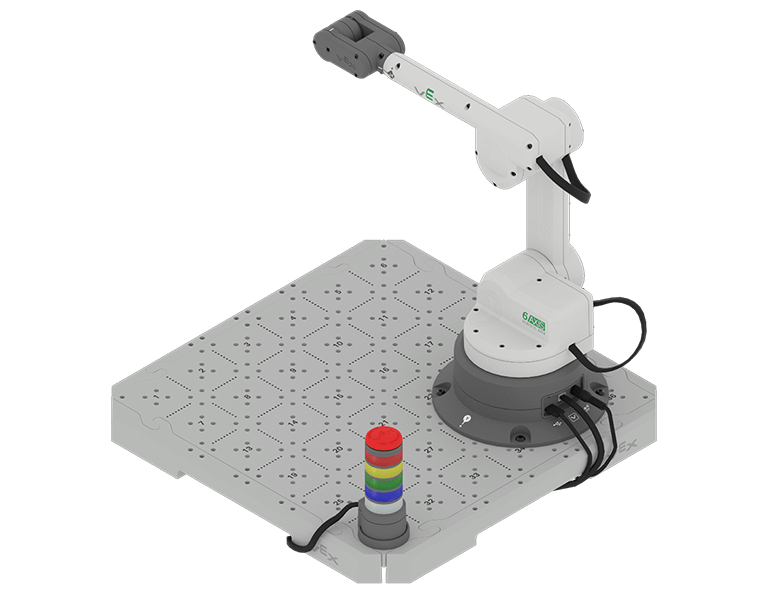
ตั้งค่า VEX CTE Workcell สำรวจระบบพิกัดคาร์ทีเซียนและเรียนรู้เกี่ยวกับวิธีการใช้หุ่นยนต์ในอุตสาหกรรม
หน่วย 2
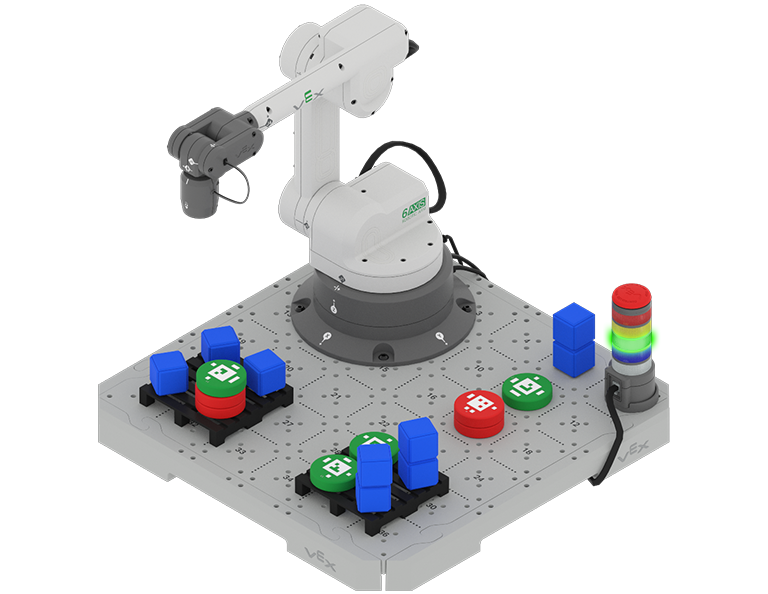
การใช้จี้คำสอน
ใช้ Teach Pendant เพื่อควบคุมการเคลื่อนที่ของแขนหุ่นยนต์ 6 แกนขณะที่คุณหยิบและวางดิสก์บน CTE Tile
หน่วย 3
การเคลื่อนไหวการเขียนโค้ด
ใช้การเข้ารหัสแบบบล็อกเพื่อเข้ารหัสแขนหุ่นยนต์ 6 แกนเพื่อเคลื่อนที่ไปตามแกน x, y และ z และรวมพฤติกรรมเหล่านั้นเพื่อย้ายไปยังตำแหน่งบนกระเบื้อง CTE
หน่วย 4
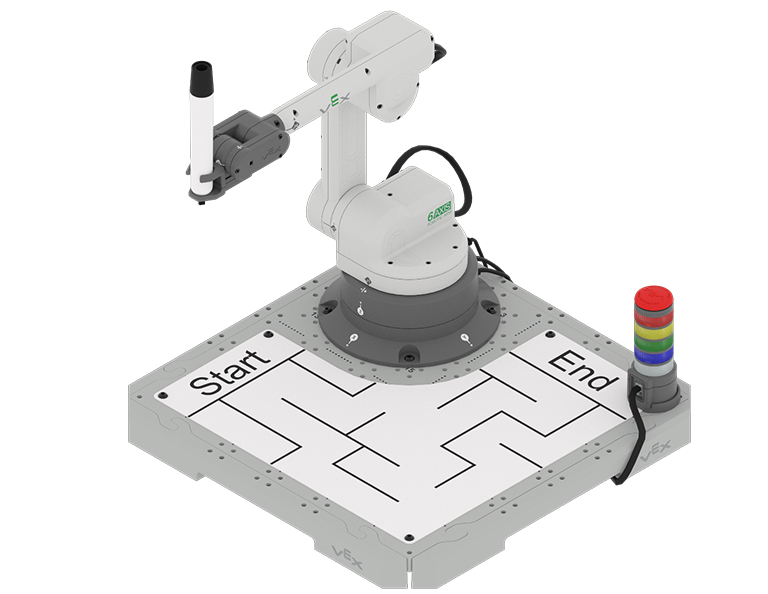
การควบคุมเส้นทาง
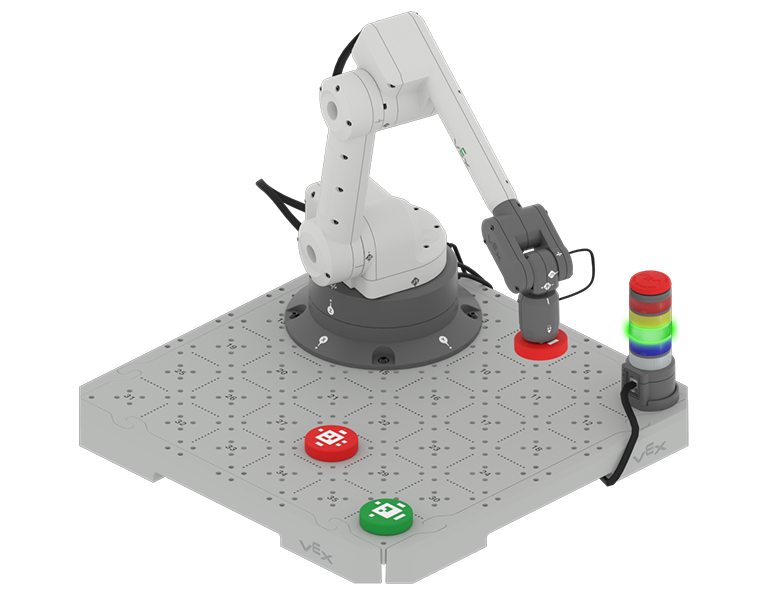
เขียนโค้ด VEX CTE Workcell เพื่อวาดบนไวท์บอร์ดด้วยปากกาและเคลื่อนที่ไปรอบๆสิ่งกีดขวางบนกระเบื้อง CTE
หน่วย 5
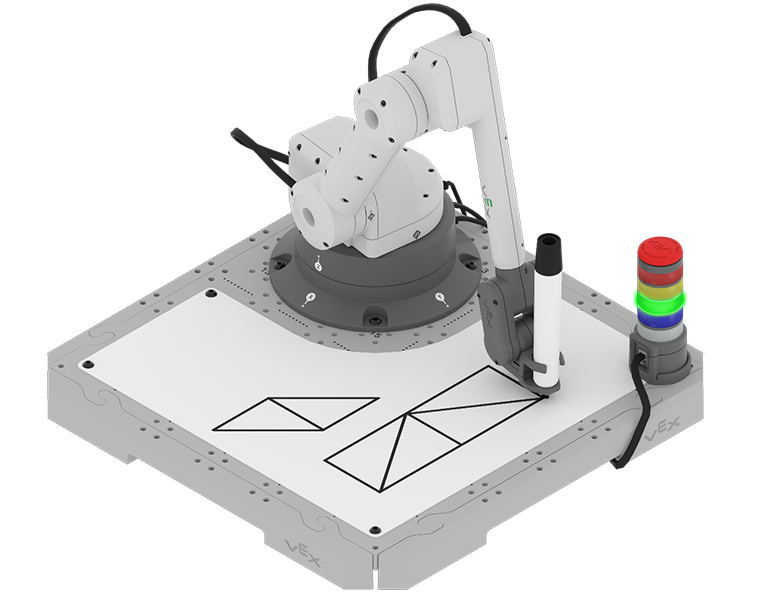
รูปทรงการเขียนโค้ด
สำรวจวิธีที่แขนหุ่นยนต์ 6 แกนเคลื่อนที่ไปตามแกน x, y และ z เพื่อวาดรูปทรง
หน่วย 6
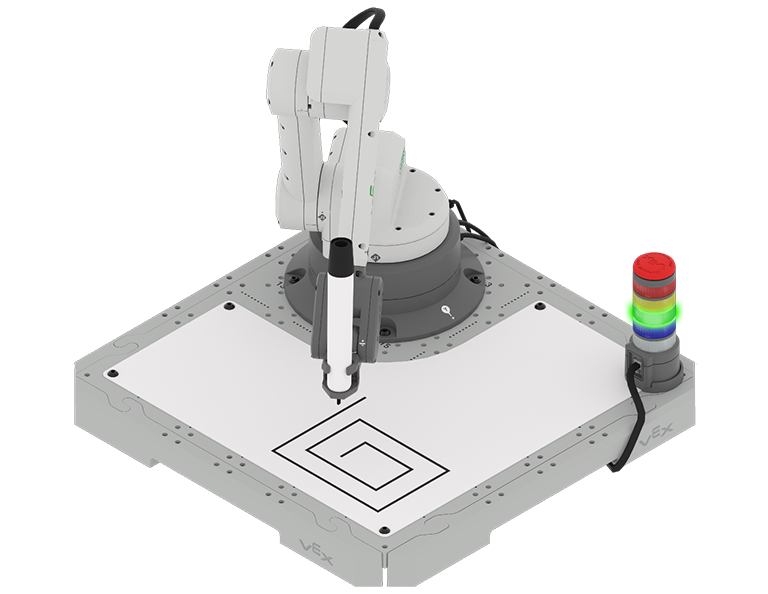
การเคลื่อนไหวสัมบูรณ์เทียบกับการเคลื่อนไหวสัมพัทธ์
เรียนรู้วิธีการเขียนรหัสแขนกลหุ่นยนต์ 6 แกนเพื่อใช้การเคลื่อนไหวทั้งแบบสัมบูรณ์และแบบสัมพัทธ์ในการวาดรูปทรง จากนั้นสร้างรูปทรงและรูปแบบที่ซับซ้อนมากขึ้นโดยการรวมตัวแปรและวนซ้ำ
หน่วย 7
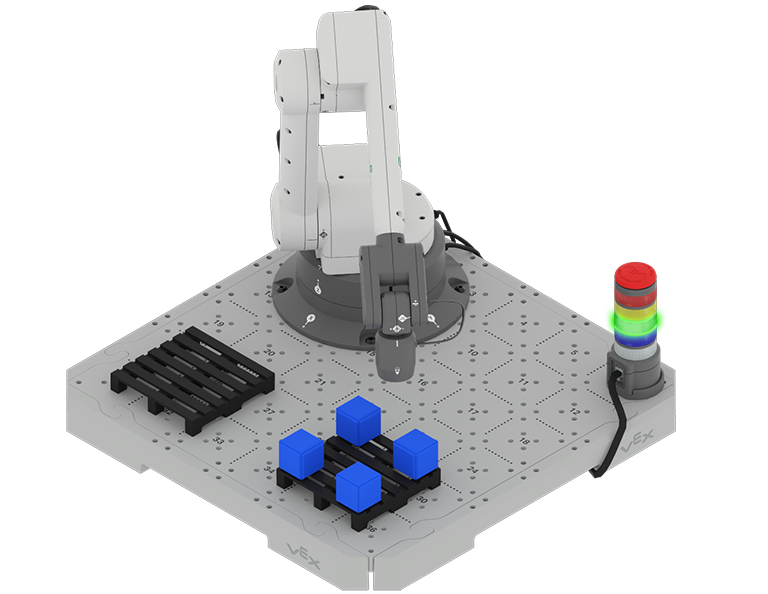
การขนส่งและการจัดเรียงวัตถุ
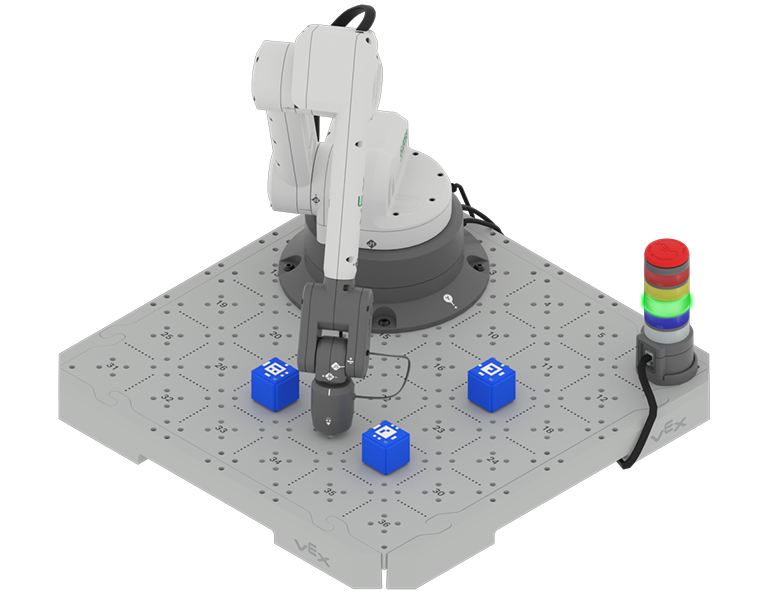
เขียนรหัสแขน 6 แกนเพื่อเลือกและวางลูกบาศก์บนพาเลท จากนั้นใช้ตัวแปรและ If then blocks เพื่อวาง Cubes หลายอันบนพาเลท
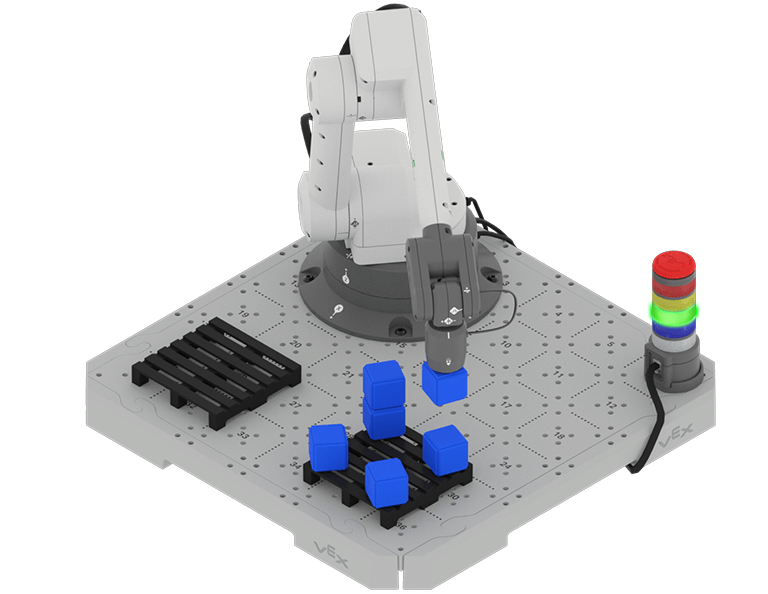
หน่วย 8
การวางซ้อนวัตถุ
เรียนรู้วิธีวางแผนเพื่อทำงานให้เสร็จจากนั้นใส่รหัสแขน 6 แกนเพื่อวางลูกบาศก์ทั้งเก้าไว้บนพาเลท
แคปสโตน
กระบวนการออกแบบทางวิศวกรรม
ใช้ทุกสิ่งที่คุณได้เรียนรู้จนถึงตอนนี้เพื่อกำหนดรหัสแขน 6 แกนเพื่อทำการท้าทาย Capstone ให้สำเร็จ!