
الدرس 4: الحركة المستقلة على طول المحور Y
في الدرس 3، تعلمت كيفية برمجة الذراع المكون من 6 محاور للتحرك على طول المحور السيني.
في هذا الدرس، سوف تتعلم كيفية برمجة الذراع المكون من 6 محاور على طول المحور y.
في نهاية هذا الدرس، سوف تقوم ببرمجة الذراع المكون من 6 محاور للتحرك على طول المحور y للعثور على الحد الأدنى والحد الأقصى لقيمة y التي يمكن للذراع المكون من 6 محاور التحرك إليها.
ترميز الذراع المكون من 6 محاور على طول المحور Y
يمكن برمجة الذراع المكون من 6 محاور للتحرك بشكل مستقل على طول المحور y، على غرار قدرته على التحرك على طول المحور x. اتبع الخطوات أدناه لترميز الذراع المكون من 6 محاور للتحرك على طول المحور y.
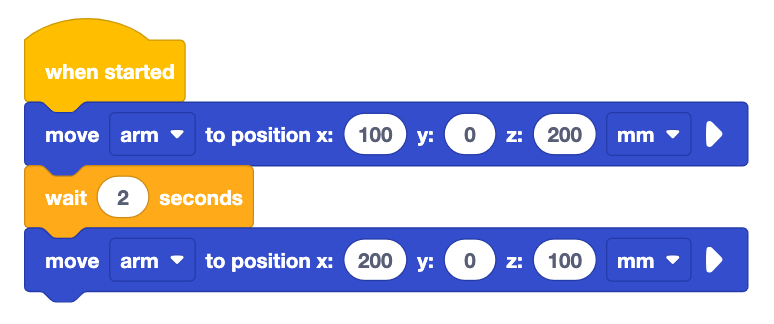
افتح مشروعك المحفوظ من الدرس 3، أو أعد إنشاء المشروع الموضح هنا.
قم بإعادة تسمية المشروع وقم بتغيير قيم y واحفظه على جهازك.
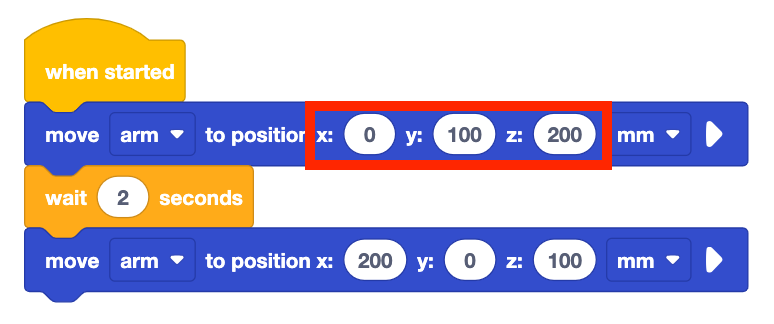
قم بضبط معلمات أول نقل إلى الموضع كتلة إلى (0، 100، 200).
ضبط معلمات الكتلة الثانية نقل إلى الموضع إلى (0، 250، 200).
ما هو برأيك سبب قيام هذا المشروع بذراع 6 محاور؟ سجل توقعاتك في دفتر الهندسة الخاص بك.
: لا تتغير قيم x وz هنا لأن الهدف هو تغيير ومراقبة محور واحد في كل مرة. إن الحفاظ على قيم x وz كما هي ولكن تغيير قيم y يسمح لنا برؤية كيفية تحرك الذراع المكون من 6 محاور على طول المحور y.

تأكد من أن الذراع المكون من 6 محاور متصل بـ VEXcode. تشغيل المشروع.
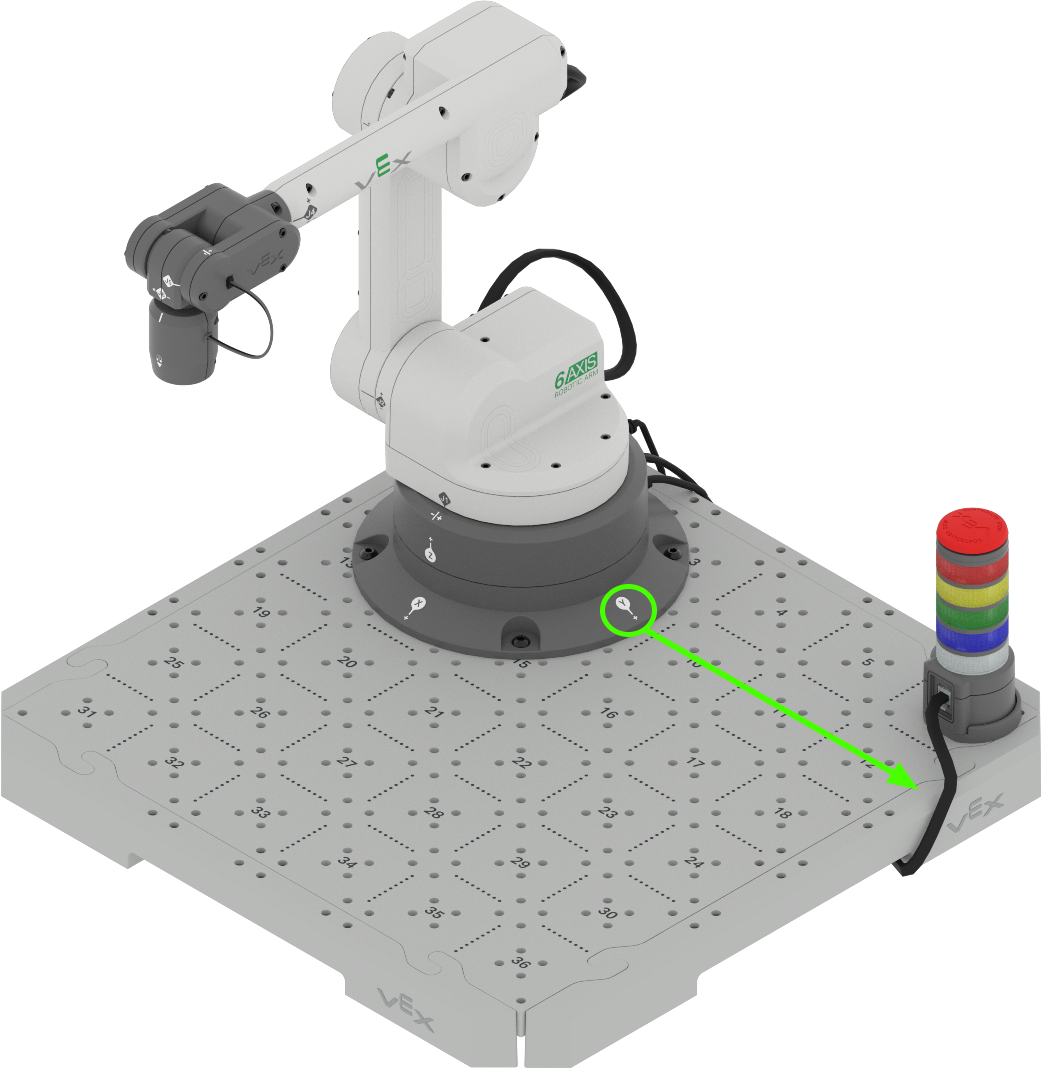
راقب الذراع المكون من 6 محاور أثناء تحركه على طول المحور y. لاحظ أن الذراع المكون من 6 محاور سيبدأ بالتحرك إلى الوضع الآمن (120، 0، 100)، ثم سينفذ الكتل في المشروع.
أوقف المشروع بمجرد توقف الذراع المكون من 6 محاور عن الحركة.
سجل ملاحظاتك في دفتر الهندسة الخاص بك. كيف تحرك الذراع ذو الستة محاور في هذا المشروع؟ هل هو مماثل أو مختلف عن توقعاتك؟ لماذا؟
لاحظ أنه عندما يتم تغيير قيمة y، يمتد الذراع المكون من 6 محاور ويتقلص على طول المحور y، كما هو موضح في الرسوم المتحركة. يبدأ الذراع ذو الستة محاور في الوضع الآمن، ثم يتحرك إلى اليمين على طول المحور y الموجب، ثم إلى اليسار في الاتجاه السالب على المحور y.
كيف يقارن ذلك بحركة ذراعك المكونة من 6 محاور في هذا المشروع؟
نشاط
الآن بعد أن تعلمت كيفية برمجة الذراع المكون من 6 محاور للتحرك على طول المحور y، سوف تمارس هذه المهارات. في هذا النشاط، سوف تقوم ببرمجة الذراع المكون من 6 محاور للتحرك على طول المحور y للعثور على الحد الأدنى والحد الأقصى لقيم y التي يمكن للذراع المكون من 6 محاور التحرك إليها.
- قم بإجراء تنبؤ بشأن الحد الأدنى والحد الأقصى لقيم y التي يمكن أن يتحرك إليها الذراع المكون من 6 محاور. قم بتسجيل القيم المتوقعة في دفتر الهندسة الخاص بك.
- باستخدام نفس المشروع أعلاه، قم قيم y في الكتلتين من قيمك المتوقعة.
- قم بتشغيل مشروعك لاختبار توقعاتك. تأكد من أن الذراع المكون من 6 محاور متصل بـ VEXcode.
- استمر في التنبؤ واختبار قيم y المختلفة. تأكد من تسجيل توقعاتك ونتائجك في دفتر الهندسة الخاص بك عند اختبار مشاريعك. ما هي القيم الدنيا والقصوى التي تجدها ؟
- قارن نتائجك مع القيم للمجموعات الأخرى. هل هما متشابهان أم مختلفان؟ ما هي المجموعة التي لها أكبر وأصغر قيمة؟ اختبر هذه القيم وقم بتعديل نتائجك إذا لزم الأمر.
تحقق من فهمك
قبل البدء في الدرس التالي، تأكد من فهمك للمفاهيم الموجودة في هذا الدرس من خلال الإجابة على الأسئلة الموجودة في المستند في دفتر الهندسة الخاص بك.
أسئلة التحقق من فهمك > (Google Doc / .docx / .pdf)
حدد التالي > لمعرفة كيفية برمجة الذراع المكون من 6 محاور للتحرك على طول المحور z.