
บทที่ 4: การเคลื่อนที่อัตโนมัติตามแกน Y
ในบทที่ 3 คุณจะได้เรียนรู้วิธีการเข้ารหัสแขน 6 แกนเพื่อเคลื่อนที่ไปตามแกน
ในบทเรียนนี้ คุณจะได้เรียนรู้วิธีการเข้ารหัสแขน 6 แกนตามแกน y
เมื่อสิ้นสุดบทเรียนนี้ คุณจะเขียนโค้ดแขน 6 แกนให้เคลื่อนที่ไปตามแกน y เพื่อหาค่า y ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนที่ไปได้
การเข้ารหัสแขน 6 แกนตามแกน Y
แขน 6 แกนสามารถเข้ารหัสให้เคลื่อนที่ไปตามแกน y ได้โดยอัตโนมัติ เช่นเดียวกับที่สามารถเคลื่อนที่ไปตามแกน x ได้ ทำตามขั้นตอนต่อไปนี้เพื่อเขียนโค้ดแขน 6 แกนให้เคลื่อนที่ไปตามแกน y
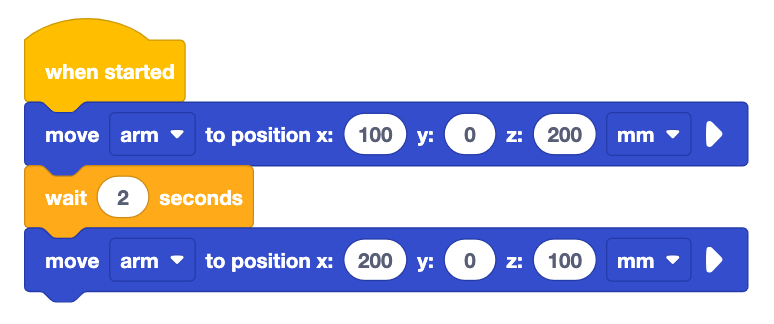
เปิดโครงการที่คุณบันทึกไว้จากบทเรียนที่ 3 หรือสร้างโครงการใหม่ตามที่แสดงที่นี่
เปลี่ยนชื่อโครงการ เปลี่ยนค่า y เป็น และบันทึกลงในอุปกรณ์ของคุณ
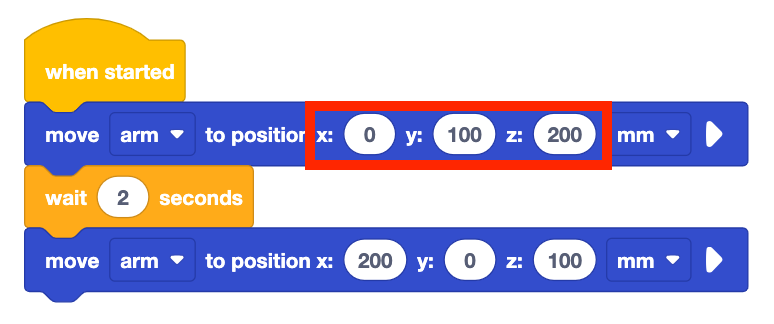
ตั้งค่าพารามิเตอร์ของ แรก ย้ายไปที่ตำแหน่ง บล็อกเป็น (0, 100, 200)
ตั้งค่าพารามิเตอร์ของบล็อกที่สอง เลื่อนไปที่ตำแหน่ง เป็น (0, 250, 200)
คุณคิดว่าโครงการนี้จะทำให้ 6-Axis Arm ทำงานอะไรได้บ้าง? บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
หมายเหตุ: ค่า x และ z ไม่มีการเปลี่ยนแปลงที่นี่ เนื่องจากเป้าหมายคือการเปลี่ยนแปลงและสังเกตแกนหนึ่งทีละแกน การรักษาค่า x และ z ไว้เท่าเดิมแต่การเปลี่ยนค่า y ทำให้เราเห็นได้ว่าแขน 6 แกนจะเคลื่อนที่ไปตามแกน y อย่างไร

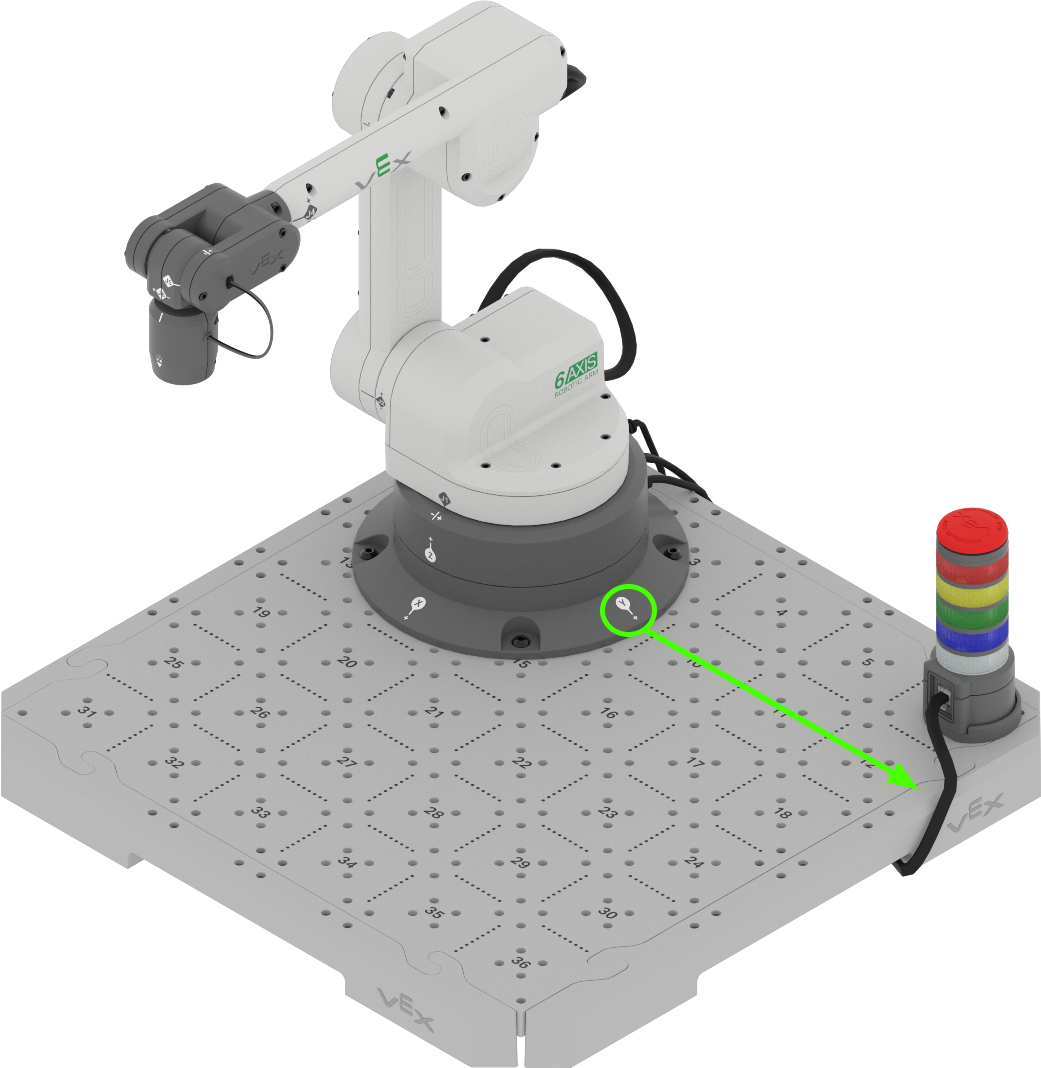
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode ดำเนินโครงการ
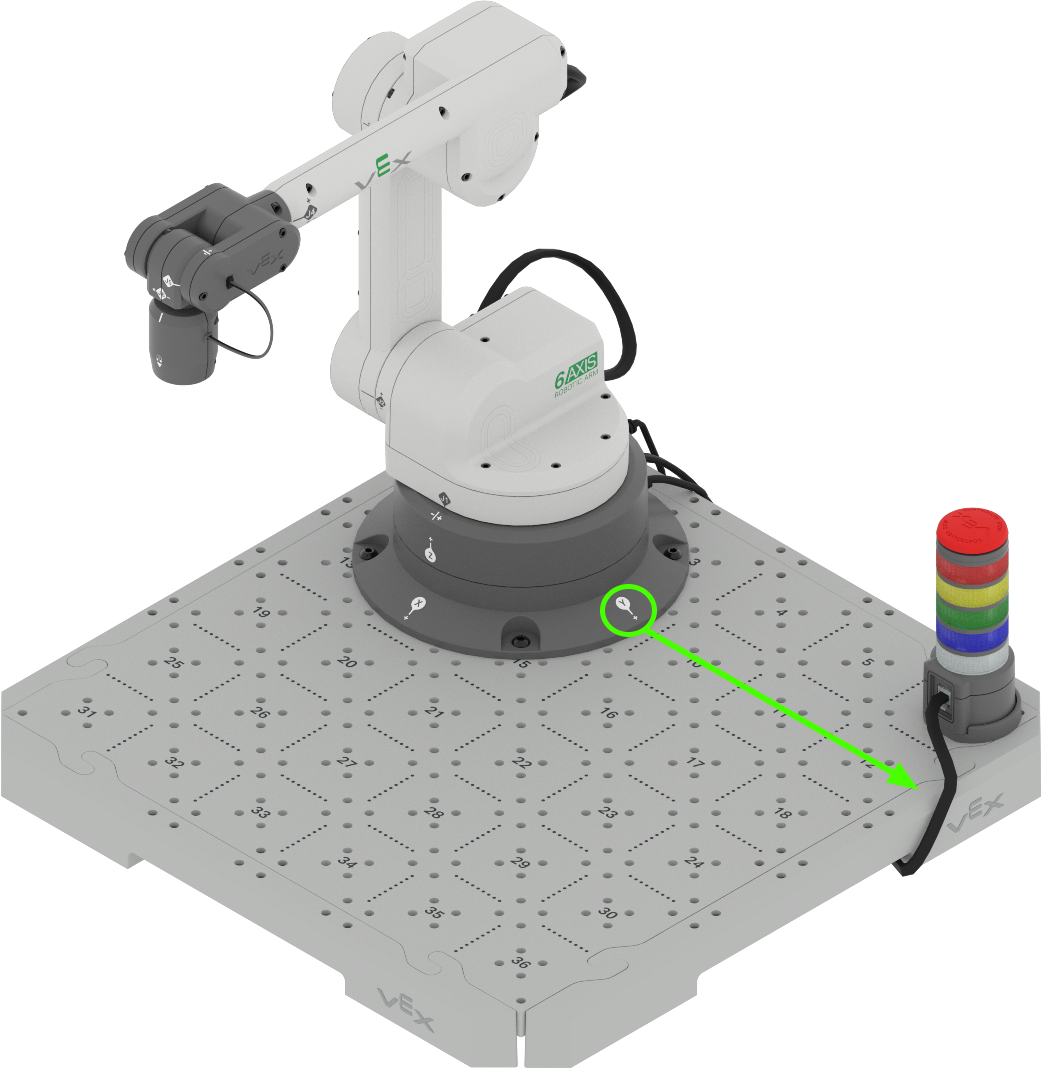
สังเกตแขน 6 แกนในขณะที่เคลื่อนที่ไปตามแกน y สังเกตว่าแขน 6 แกนจะเริ่มต้นด้วยการเคลื่อนไปยังตำแหน่งปลอดภัย (120, 0, 100) จากนั้นจะดำเนินการบล็อกในโปรเจ็กต์
หยุดโครงการเมื่อแขน 6 แกนหยุดเคลื่อนที่
บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ แขน 6 แกนเคลื่อนไหวอย่างไรในโปรเจ็กต์นี้? มันเหมือนหรือแตกต่างกับคำทำนายของคุณหรือเปล่า? ทำไม?
สังเกตว่าเมื่อเปลี่ยนค่า y แขน 6 แกนจะขยายและหดกลับไปตามแกน y ดังที่แสดงในแอนิเมชัน แขน 6 แกนเริ่มต้นที่ตำแหน่งปลอดภัย จากนั้นเคลื่อนไปทางขวาตามแนวแกน y บวก จากนั้นเคลื่อนไปทางซ้ายในทิศทางลบบนแกน y
เมื่อเทียบกับการเคลื่อนไหวของแขน 6 แกนในโปรเจ็กต์นี้แล้วเป็นอย่างไรบ้าง?
กิจกรรม
ตอนนี้คุณได้เรียนรู้วิธีการเขียนโปรแกรมแขน 6 แกนเพื่อเคลื่อนที่ตามแกน y แล้ว คุณก็จะฝึกฝนทักษะเหล่านี้ได้ ในกิจกรรมนี้ คุณจะเขียนโค้ดแขน 6 แกนให้เคลื่อนที่ไปตามแกน y เพื่อหาค่า y ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนที่ไปได้
- ทำนายค่า y ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนไปได้ บันทึกค่าที่คาดการณ์ไว้ในสมุดบันทึกวิศวกรรมของคุณ
- ใช้โครงการเดียวกันจากด้านบน เปลี่ยนค่า y จาก ในการย้าย ไปยังตำแหน่ง บล็อกเป็น ตามค่าที่คุณคาดการณ์ไว้
- รันโครงการของคุณเพื่อทดสอบการทำนายของคุณ ตรวจสอบให้แน่ใจว่า Arm 6 แกนของคุณเชื่อมต่อกับ VEXcode
- ดำเนินการคาดการณ์และทดสอบค่า y ต่างๆ ต่อไป อย่าลืมบันทึกคำทำนายและผลลัพธ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณเมื่อทำการทดสอบโครงการของคุณ คุณพบค่าต่ำสุดและค่าสูงสุดเท่าไร
- เปรียบเทียบผลลัพธ์ของคุณกับค่า ของกลุ่มอื่น มันเหมือนหรือแตกต่างกันไหม? กลุ่มใดมีค่ามากที่สุดและน้อยที่สุด ทดสอบค่าเหล่านั้นและปรับผลลัพธ์ของคุณหากจำเป็น
ตรวจสอบความเข้าใจของคุณ
ก่อนจะเริ่มบทเรียนถัดไป ให้แน่ใจว่าคุณเข้าใจแนวคิดในบทเรียนนี้แล้วโดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
คำถามตรวจสอบความเข้าใจของคุณ > (Google Doc / .docx / .pdf)
เลือก ถัดไป > เพื่อเรียนรู้เกี่ยวกับวิธีการเขียนโค้ดแขน 6 แกนเพื่อเคลื่อนที่ไปตามแกน z