
Leçon 4 : Mouvement autonome le long de l'axe Y
Dans la leçon 3, vous avez appris à coder le bras à 6 axes pour qu'il se déplace le long de l'axe des .
Dans cette leçon, vous apprendrez à coder le bras à 6 axes le long de l'axe y.
À la fin de cette leçon, vous coderez le bras à 6 axes pour qu'il se déplace le long de l'axe y afin de trouver la valeur y minimale et maximale vers laquelle le bras à 6 axes peut se déplacer.
Codage du bras à 6 axes le long de l'axe Y
Le bras à 6 axes peut être codé pour se déplacer de manière autonome le long de l'axe y, de la même manière qu'il peut se déplacer le long de l'axe x. Suivez les étapes ci-dessous pour coder le bras à axes pour qu'il se déplace le long de l'axe y.
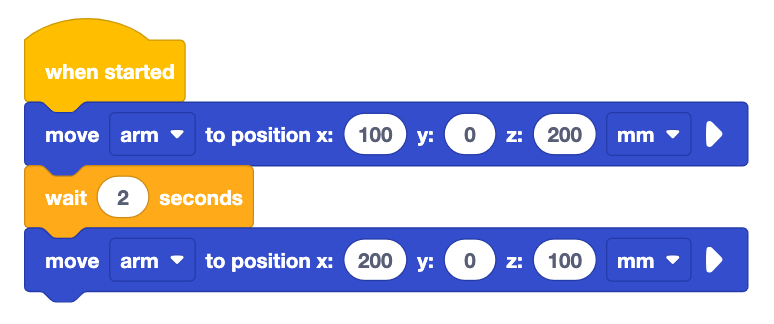
Ouvrez votre projet enregistré de la leçon 3 ou recréez le projet présenté ici.
Renommez le projet Modifiez les valeurs y et enregistrez-le sur votre appareil.
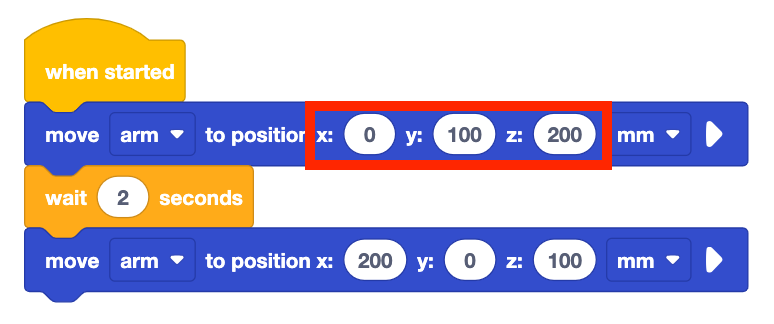
Définissez les paramètres du premier bloc Déplacer vers la position sur (0, 100, 200).
Définissez les paramètres du deuxième bloc Déplacer vers la position sur (0, 250, 200).
Selon vous, que va faire ce projet sur le bras à 6 axes ? Notez votre prédiction dans votre carnet d’ingénierie.
Remarque : Les valeurs x et z ne sont pas modifiées ici car l’objectif est de modifier et d’observer un axe à la fois. En conservant les valeurs x et z identiques mais en modifiant les valeurs y, nous pouvons voir comment le bras à 6 axes se déplacera le long de l'axe y.

Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez le projet.
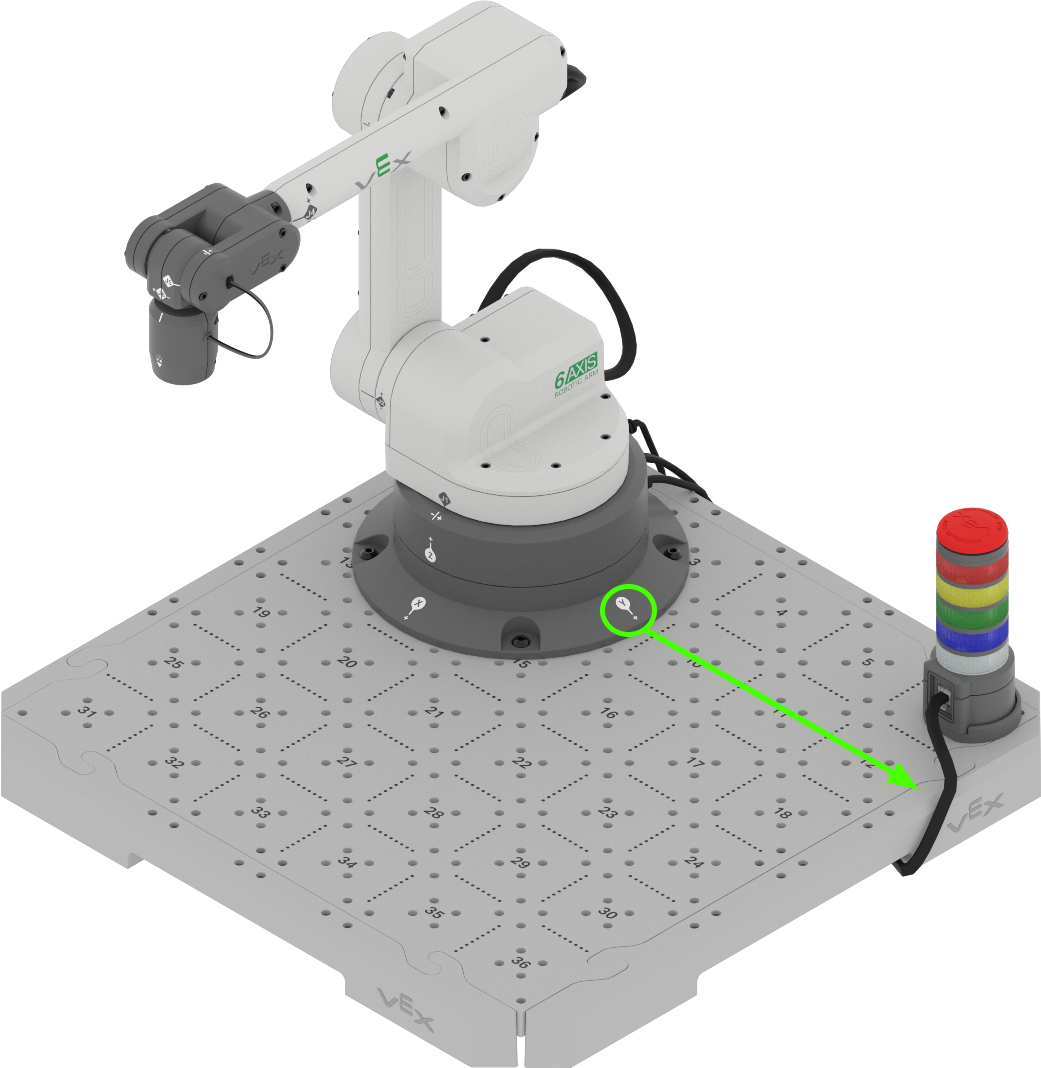
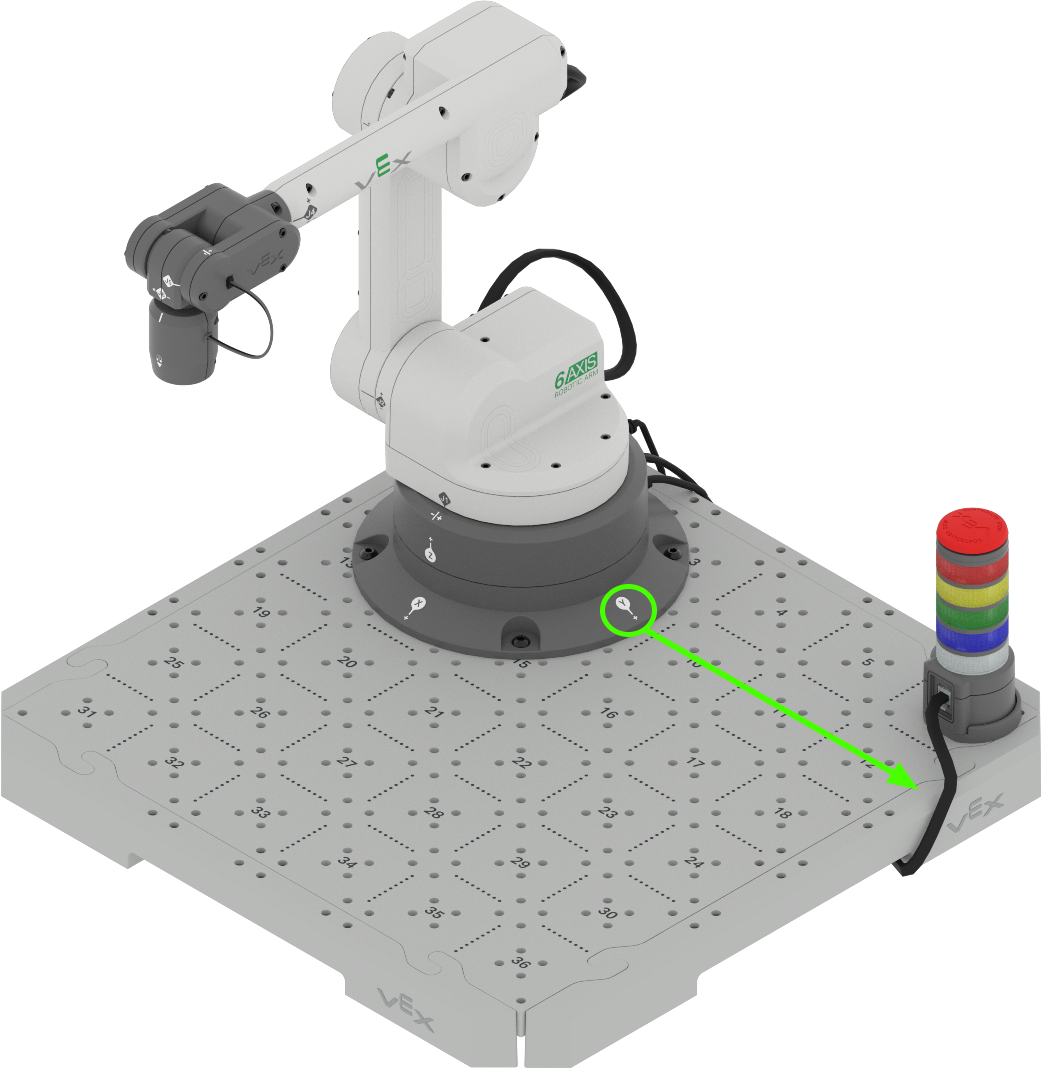
Observez le bras à 6 axes lorsqu'il se déplace le long de l'axe des Y. Notez que le bras à 6 axes commencera par se déplacer vers la position de sécurité (120, 0, 100), puis exécutera les blocs du projet.
Arrêtez le projet une fois que le bras à 6 axes a cessé de bouger.
Notez vos observations dans votre carnet d’ingénierie. Comment le bras à 6 axes s'est-il déplacé dans ce projet ? Est-ce similaire ou différent de votre prédiction ? Pourquoi?
Notez que lorsque la valeur y est modifiée, le bras à 6 axes s'étend et se rétracte le long de l'axe y, comme indiqué dans l'animation. Le bras à 6 axes commence en position de sécurité, puis se déplace vers la droite le long de l'axe y positif, puis vers la gauche dans la direction négative sur l'axe y.
Comment cela se compare-t-il au mouvement de votre bras à 6 axes dans ce projet ?
Activité
Maintenant que vous avez appris à coder le bras à 6 axes pour qu'il se déplace le long de l'axe y, vous allez pratiquer ces compétences. Dans cette activité, vous coderez le bras à 6 axes pour qu'il se déplace le long de l'axe y afin de trouver les valeurs y minimales et maximales vers lesquelles le bras à 6 axes peut se déplacer.
- Faites une prédiction pour les valeurs y minimales et maximales vers lesquelles le bras à 6 axes peut se déplacer. Notez les valeurs prédites dans votre cahier d’ingénierie.
- En utilisant le même projet ci-dessus, les valeurs y des blocs Déplacez-vous vers la position par vos valeurs prédites.
- Exécutez votre projet pour tester vos prédictions. Assurez-vous que votre bras 6 axes est connecté à VEXcode.
- Continuez à prédire et à tester différentes valeurs y. Assurez-vous d’enregistrer vos prédictions et vos résultats dans votre carnet d’ingénierie lorsque vous testez vos projets. Quelles valeurs minimales et maximales trouvez vous ?
- Comparez vos résultats aux valeurs des autres groupes. Sont-ils similaires ou différents ? Quel groupe a les valeurs les plus grandes et les plus petites ? Testez ces valeurs et ajustez vos résultats si nécessaire.
Vérifiez votre compréhension
Avant de commencer la leçon suivante, assurez-vous de bien comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d' .
Questions pour vérifier votre compréhension > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour savoir comment coder le bras à 6 axes pour qu'il se déplace le long de l'axe z.