
في الدرس السابق، قمت بتحليل مشروع VEXcode الذي رسمت فيه الذراع الروبوتية ذات 6 محاور مثلثًا. في هذا الدرس، ستتعلم:
- كيفية ترميز ذراع 6 محاور لرسم المثلث من الدرس السابق.
- كيفية إضافة تعليقات إلى مشروع في VEXcode.
- كيفية ترميز ذراع 6 محاور لرسم مثلثات متعددة.
في نهاية هذا الدرس، ستضيف إلى مشروعك بحيث يرسم ذراع 6 محاور مثلثًا ثانيًا على السبورة البيضاء. يسلط رسم مثلثات متعددة باستخدام أداة حامل القلم الضوء على كيفية تحرك الذراع سداسي المحاور في محاور متعددة.

رسم مثلث
الآن سنقوم ببناء المشروع لرسم مثلث من الدرس 1. سنقوم بتقسيم المشروع إلى كتل فردية واستكشاف كيفية ترميز الذراع سداسي المحاور للتحرك على محاور متعددة.
افتح مشروع كتل جديدة باتباع الخطوات الواردة في هذا الفيديو.
إضافة كتلة تعليق إلى مشروعك.
تشرح التعليقات ما يهدف كل جزء من المشروع إلى القيام به.
عندما تبدأ في بناء مشاريع أكثر تعقيدًا باستخدام المزيد من الكتل، يمكن أن تساعدك التعليقات على تتبع مكان وجودك في المشروع. يمكن أن يؤدي ذلك أيضًا إلى تسهيل استكشاف الأخطاء وإصلاحها عندما لا يعمل الذراع ذو 6 محاور على النحو المنشود.

اكتب "Get set up to draw a triangle" في مربع التعليق.
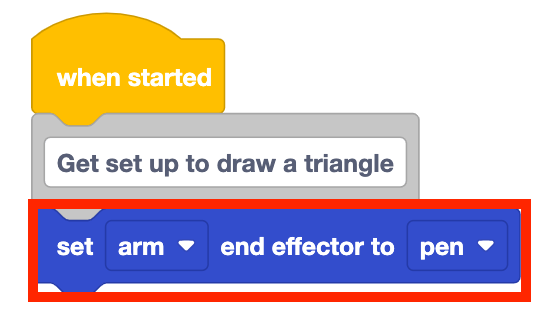
أضف كتلة مستجيب طرفية محددة إلى مشروعك. اضبط المعلمة على "قلم".
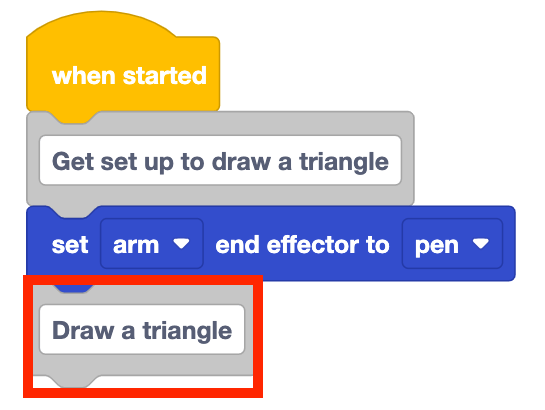
إضافة كتلة تعليق أخرى إلى مكدسك. اكتب "رسم مثلث" في مربع التعليق.
سيظهر هذا أن الكتل التالية للتعليق ستجعل ذراع 6 محاور ترسم المثلث.
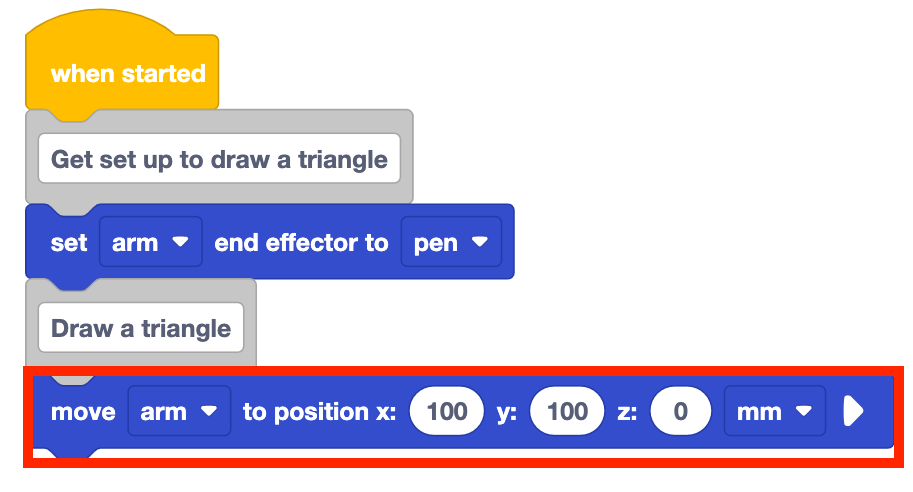
إضافة مكوِّن الانتقال إلى الموضع إلى مشروعك. أدخل الإحداثيات (100، 100، 0) في معلمات الكتلة.
سيؤدي هذا الإحداثي إلى تحريك الذراع سداسي المحاور إلى النقطة الأولى في المثلث.

إضافة كتلة نقل إلى الموضع أخرى إلى المشروع. أدخل الإحداثيات (200، 100، 0) في معلمات الكتلة.
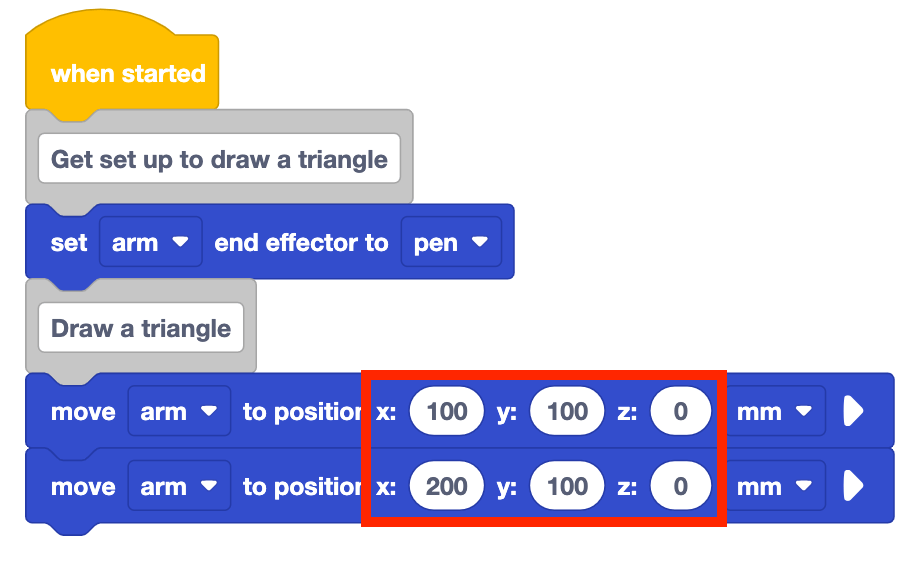
لاحظ أن الإحداثي x قد تغير من 100 مم إلى 200 مم. يؤدي ذلك إلى تحريك الذراع المكون من 6 محاور على طول المحور x في الاتجاه الموجب لـ 100 مم، مما يكمل الجانب الأول من المثلث.
يظل الإحداثي y كما هو، حيث لم يتحرك ذراع 6 محاور على الإطلاق على طول المحور y. يظل الإحداثي z كما هو، مضبوطًا على 0 مم، لذلك يلمس القلم السبورة ويرسم خطًا.
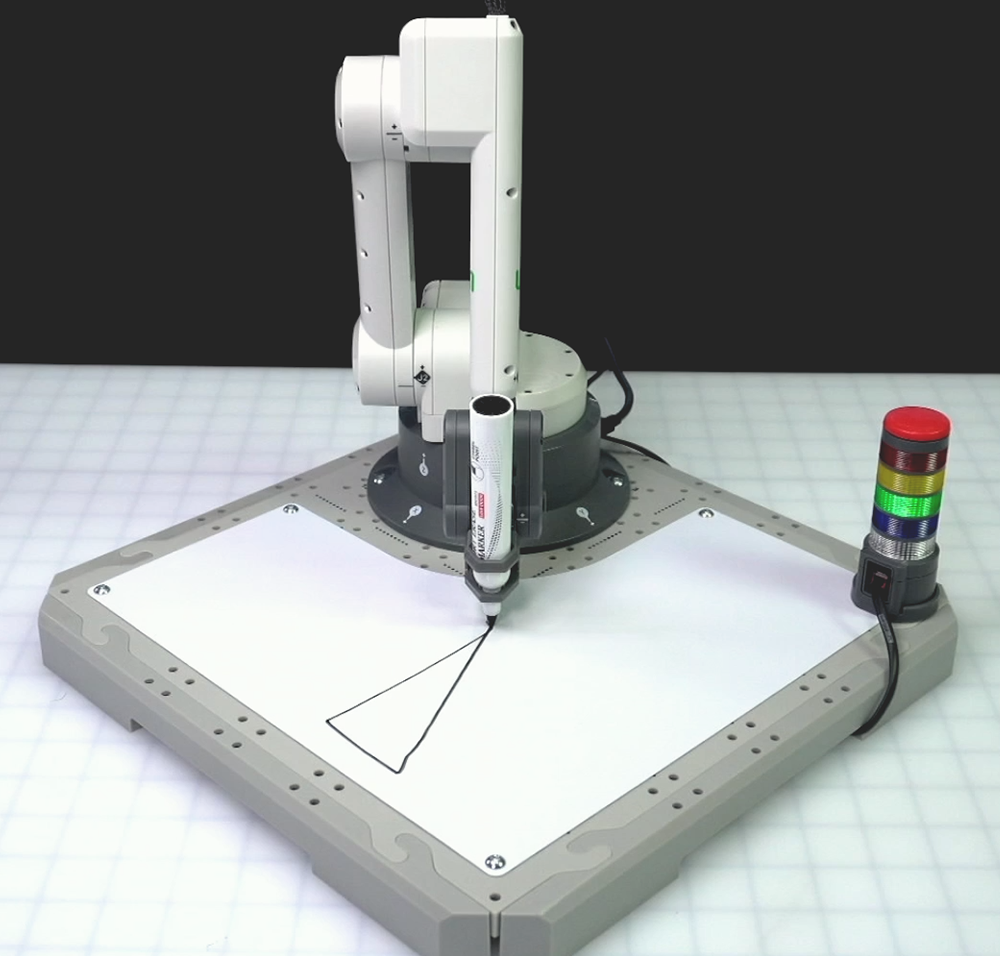
تأكد من توصيل ذراع 6 محاور برمز VEX. قم بتشغيل المشروع لاختباره.
أوقف المشروع عند انتهاء ذراع 6 محاور من الحركة.
إضافة كتلة نقل إلى الموضع أخرى إلى المشروع. أدخل الإحداثيات (200، 150، 0) في معلمات الكتلة.
سيؤدي هذا إلى ترميز ذراع 6 محاور لرسم الجانب الثاني من المثلث.
لاحظ أن الإحداثي x والإحداثي z يظلان كما هما، لكن الإحداثي y يتحرك 50 مم في الاتجاه الموجب. يجب أن ينتقل الذراع سداسي المحاور فقط على طول المحور الصادي لرسم هذا الجانب من المثلث.
امسح السبورة البيضاء. قم بتشغيل المشروع لاختباره.
يمكن أن يساعدك مسح السبورة البيضاء بين كل جولة على رؤية ما يرسمه القلم بوضوح في كل مرة تختبر فيها المشروع.
أوقف المشروع عند انتهاء ذراع 6 محاور من الحركة.

إضافة كتلة نقل إلى الموضع أخرى إلى المشروع. أدخل الإحداثيات (100، 100، 0) في معلمات الكتلة.
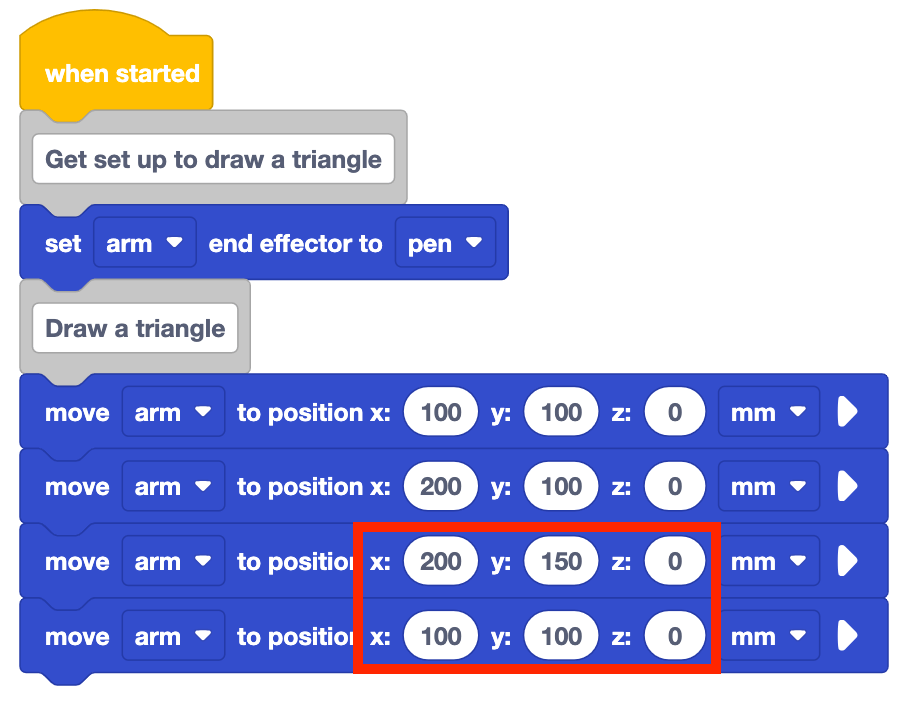
لاحظ أنك تغير كلاً من الإحداثي x والإحداثي y لإنشاء الضلع الثالث من المثلث. سترسم الذراع سداسية المحاور خطًا قطريًا يربط النقطة الثالثة من المثلث بنقطة البداية.
يتحرك مشروعك على محاور متعددة بطريقة منسقة لرسم الجانب الثالث من المثلث بنجاح.
امسح السبورة البيضاء. قم بتشغيل المشروع لاختباره.
أوقف المشروع عند الانتهاء من تحريك الذراع سداسي المحاور.
تأكد من إعادة تسمية مشروعك وحفظه على جهازك.
النشاط
الآن بعد أن تدربت على ترميز ذراع 6 محاور لرسم مثلث بالقلم، ستضيف إلى مشروعك بحيث يرسم ذراع 6 محاور مثلثًا إضافيًا على السبورة البيضاء.
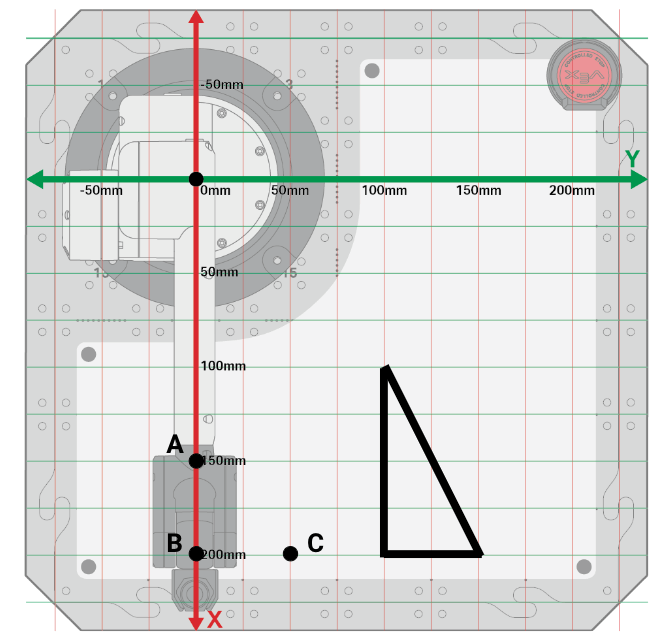
سيكون للمثلث الثاني النقاط التالية.
- A (150, 0, 0)
- B (200, 0, 0)
- C (200, 50, 0)
النشاط: قم بالبناء على مشروعك لجعل ذراع 6 محاور ترسم مثلثًا ثانيًا على السبورة البيضاء. استخدم التعليقات لتنظيم هذا المشروع.
- أضف إلى مشروع الدرس 2 الخاص بك وقم بإنشاء تعليقات تصف كل سلوك تريد أن يكمله ذراع 6 محاور لتنظيم التعليمات البرمجية الخاصة بك.
- أضف كتل الانتقال إلى الموضع المصاحبة لمشروعك للذراع سداسي المحاور لرسم المثلث الثاني.
- قم بتشغيل المشروع لاختباره.
- هل قمت برسم مثلث ثانٍ على السبورة البيضاء ؟ إذا لم يكن الأمر كذلك، فاستمر في تعديل مشروعك واختبره حتى تنجح.
- بعد الانتهاء من المشروع، قم بإعادة تسمية المشروع وحفظه على جهازك.
- قم بتوثيق مشروعك عن طريق تسجيله في دفتر ملاحظاتك الهندسية.
لمعلوماتك
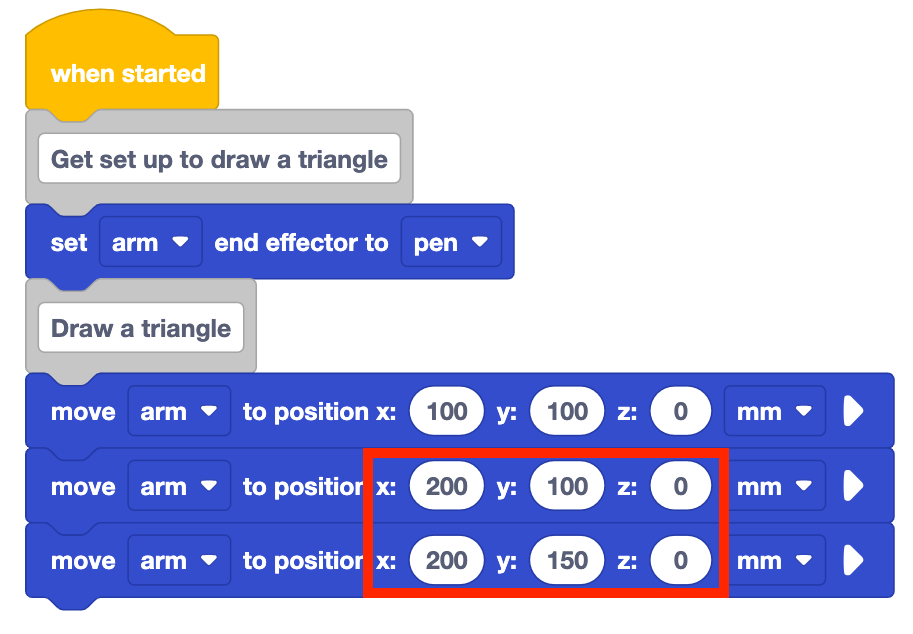
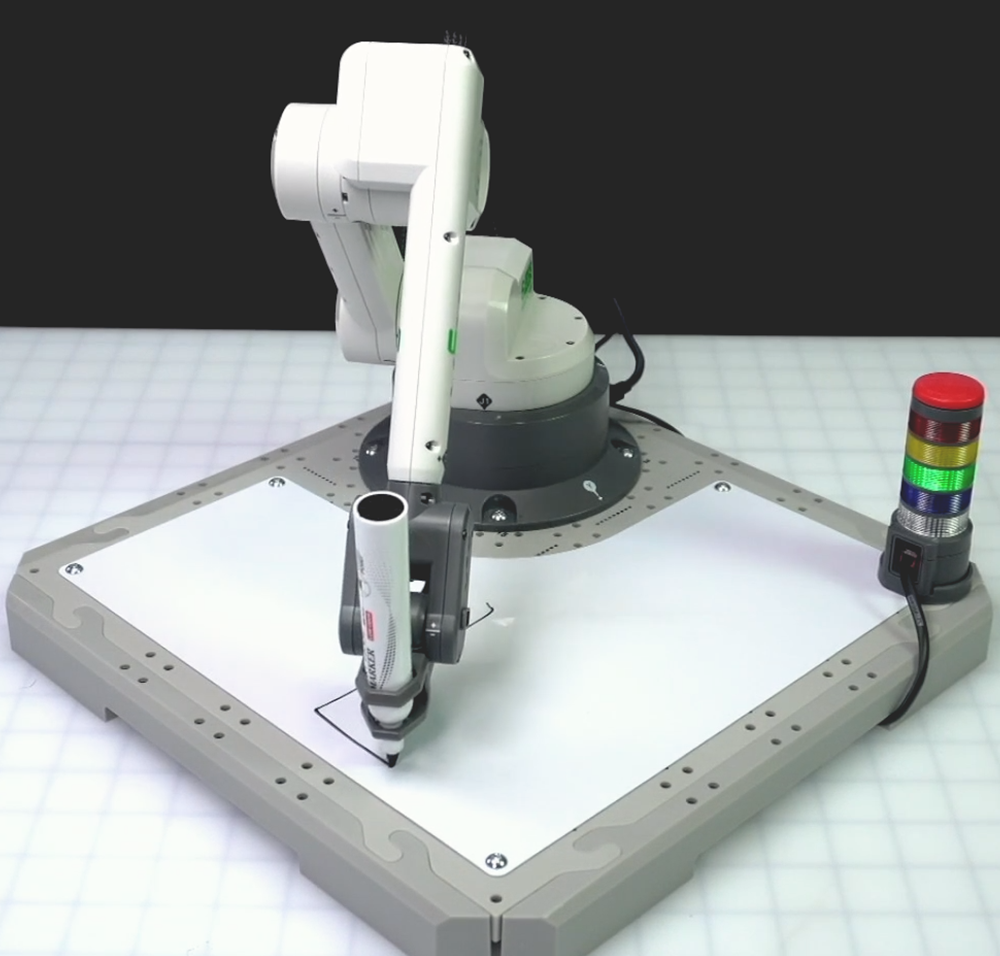
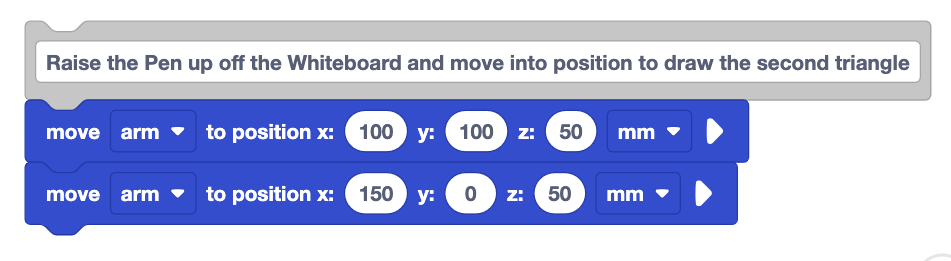
أثناء بناء مشروعك لرسم مثلث ثانٍ على السبورة البيضاء، قد تجد نفسك مع خط غير مرغوب فيه، مثل هذا:
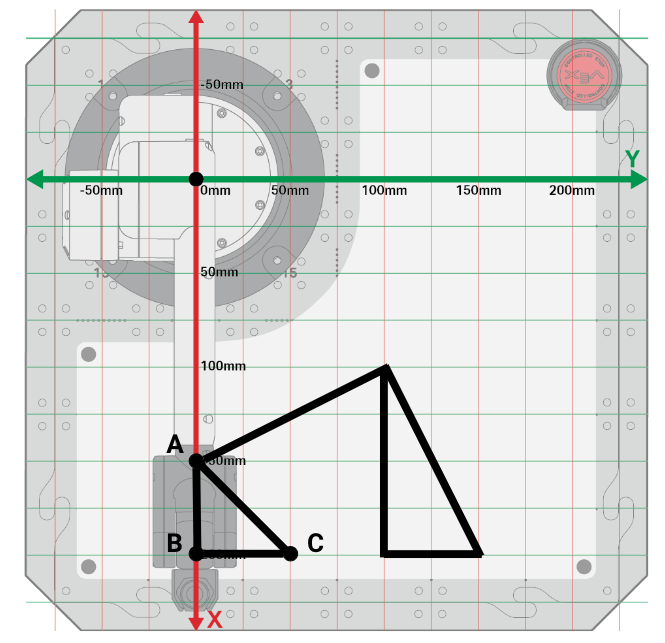
- وذلك لأن القلم ظل على السبورة البيضاء عندما انتقلت من مثلث إلى آخر. ستحتاج إلى إضافة كتل لرفع الذراع المكون من 6 محاور عن طريق تحريكه على طول المحور z. للقيام بذلك، ستحتاج إلى استخدام كتلتي نقل إلى الوضع – واحدة لرفع الذراع، والأخرى لتحريكها فوق بداية المثلث الثاني.
تحقق من فهمك
قبل الانتقال إلى الدرس التالي، تأكد من فهمك للمفاهيم الواردة في هذا الدرس من خلال الإجابة على الأسئلة الواردة في المستند أدناه في دفترك الهندسي.
تحقق من فهمك للأسئلة > (Google Doc / .docx / .pdf)
حدد التالي > لإكمال انعكاس الوحدة الوسطى.