
पाठ 2: त्रिभुज बनाना
पिछले पाठ में, आपने एक VEXcode परियोजना का विश्लेषण किया था जिसमें 6-अक्ष रोबोटिक आर्म ने एक त्रिभुज बनाया था। इस पाठ में आप सीखेंगे:
- पिछले पाठ से त्रिभुज बनाने के लिए 6-अक्ष भुजा को कैसे कोड करें।
- VEXcode में किसी प्रोजेक्ट में टिप्पणियाँ कैसे जोड़ें।
- एकाधिक त्रिभुज बनाने के लिए 6-अक्ष भुजा को कैसे कोड करें।
इस पाठ के अंत में, आप अपने प्रोजेक्ट में कुछ जोड़ेंगे ताकि 6-अक्ष भुजा व्हाइटबोर्ड पर दूसरा त्रिभुज बना सके। पेन होल्डर टूल का उपयोग करके अनेक त्रिभुज बनाने से यह पता चलता है कि 6-अक्ष भुजा किस प्रकार अनेक अक्षों में गति करती है।

एक त्रिभुज बनाएं
अब हम पाठ 1 से त्रिभुज बनाने के लिए प्रोजेक्ट बनाने जा रहे हैं। हम इस परियोजना को अलग-अलग ब्लॉकों में विभाजित करेंगे और यह पता लगाएंगे कि 6-अक्ष भुजा को एकाधिक अक्षों पर गति करने के लिए किस प्रकार कोडित किया जाए।
नया ब्लॉक प्रोजेक्टखोलने के लिए इस वीडियो में दिए गए चरणों का पालन करें। वीडियो क्लिप में, टूलबार में फ़ाइल चयन किया जाता है, और फिर नया ब्लॉक प्रोजेक्ट का चयन किया जाता है। एक डायलॉग बॉक्स खुलेगा जिसमें दो विकल्प होंगे, बाईं ओर EXP ब्रेन और दाईं ओर आर्म। आर्म विकल्प का चयन किया जाता है, और कार्यक्षेत्र में एक नया प्रोजेक्ट खुलता है।
अपने प्रोजेक्ट में टिप्पणी ब्लॉक जोड़ने के लिए इस वीडियो में दिए गए चरणों का पालन करें। वीडियो क्लिप में, टिप्पणी चयनकर्ता को टूलबॉक्स के बाईं ओर चुना गया है। फिर टूलबॉक्स में एक टिप्पणी ब्लॉक का चयन किया जाता है, और वर्कस्पेस में खींचकर जब शुरू किया गया ब्लॉक से जोड़ा जाता है।
टिप्पणियाँ यह स्पष्ट करती हैं कि परियोजना के प्रत्येक भाग का उद्देश्य क्या है।
जैसे-जैसे आप अधिक ब्लॉकों का उपयोग करके अधिक जटिल परियोजनाएं बनाना शुरू करते हैं, टिप्पणियां आपको यह जानने में मदद कर सकती हैं कि आप परियोजना में कहां हैं। इससे उस स्थिति में समस्या निवारण करना भी आसान हो जाता है जब 6-अक्षीय आर्म अपेक्षित रूप से कार्य नहीं कर रहा हो।
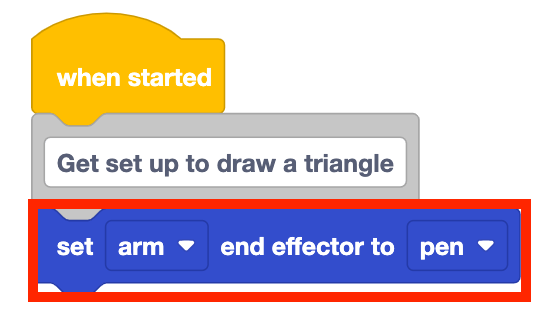
टिप्पणी ब्लॉक में "त्रिकोण बनाने के लिए तैयार हो जाइए" टाइप करें।

अपने प्रोजेक्ट में Set end effector ब्लॉक जोड़ें। पैरामीटर को 'पेन' पर सेट करें.
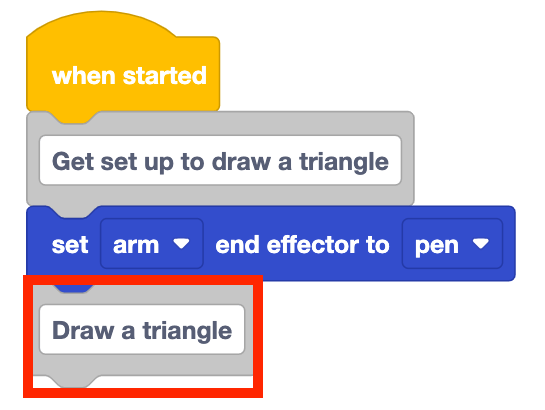
अपने स्टैक में एक और टिप्पणी ब्लॉक जोड़ें। टिप्पणी ब्लॉक में 'त्रिकोण बनाएं' टाइप करें।
इससे पता चलेगा कि टिप्पणी के बाद वाले ब्लॉकों में 6-अक्ष भुजा होगी जो त्रिभुज बनाएगी।
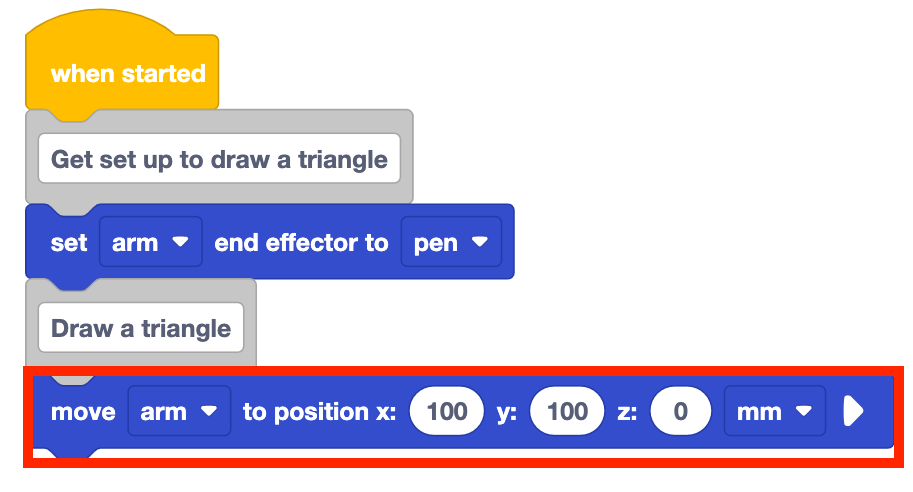
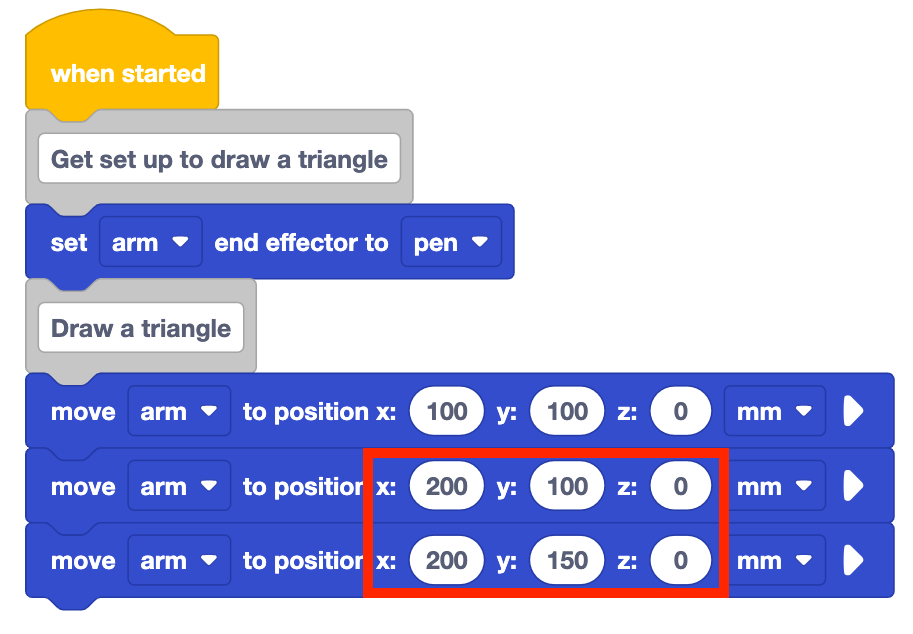
अपने प्रोजेक्ट में मूव टू पोजीशन ब्लॉक जोड़ें। ब्लॉक के पैरामीटर में निर्देशांक (100, 100, 0) दर्ज करें।
यह निर्देशांक 6-अक्ष भुजा को त्रिभुज के प्रथम बिंदु पर ले जाएगा।
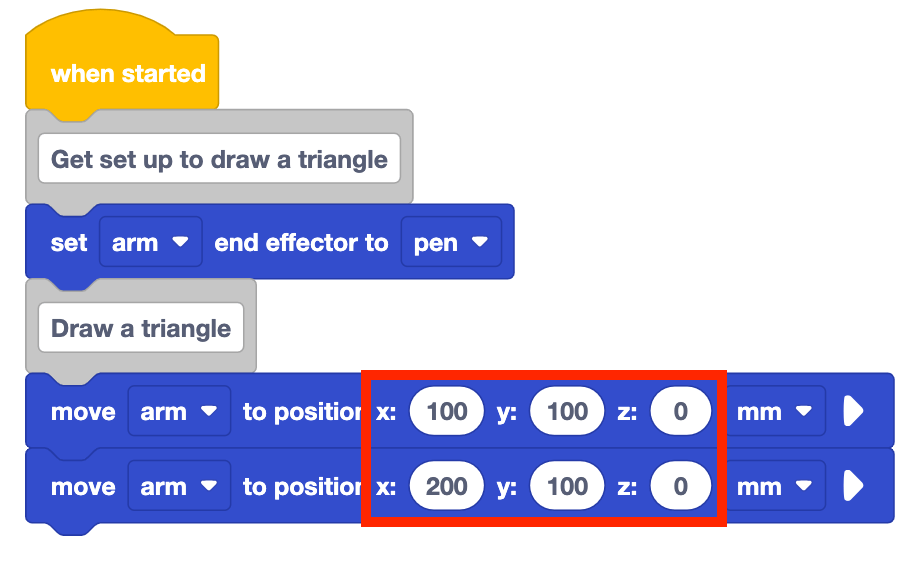
परियोजना में एक और जोड़ें, स्थिति ब्लॉक पर जाएँ। ब्लॉक के पैरामीटर में निर्देशांक (200, 100, 0) दर्ज करें।

ध्यान दें कि x-निर्देशांक 100 मिमी से 200 मिमी हो गया है। यह 6-अक्ष भुजा को x-अक्ष के साथ धनात्मक दिशा में 100 मिमी तक घुमाता है, जिससे त्रिभुज की पहली भुजा पूरी हो जाती है।
y-निर्देशांक वही रहता है, क्योंकि 6-अक्ष भुजा y-अक्ष के अनुदिश बिल्कुल भी नहीं चली है। z-निर्देशांक भी वही रहता है, 0 मिमी पर सेट किया जाता है, इसलिए पेन व्हाइटबोर्ड को छूता है और एक रेखा खींचता है।
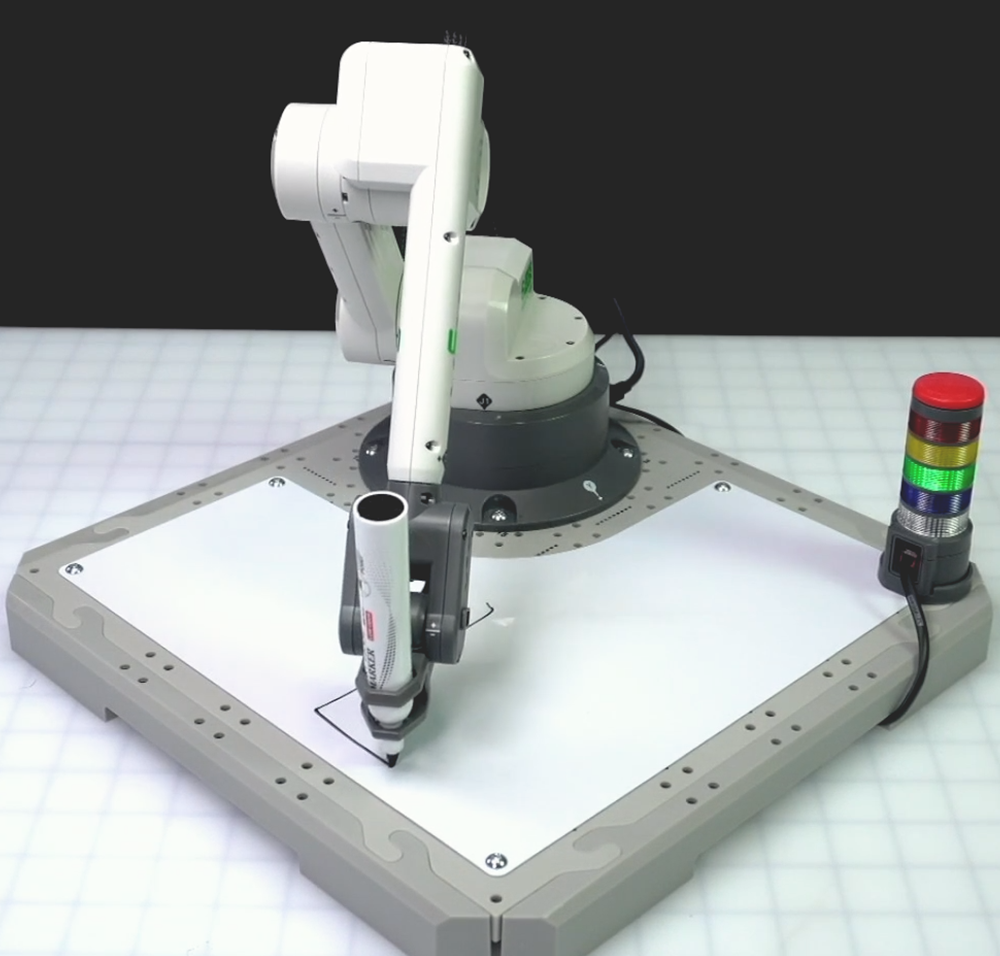
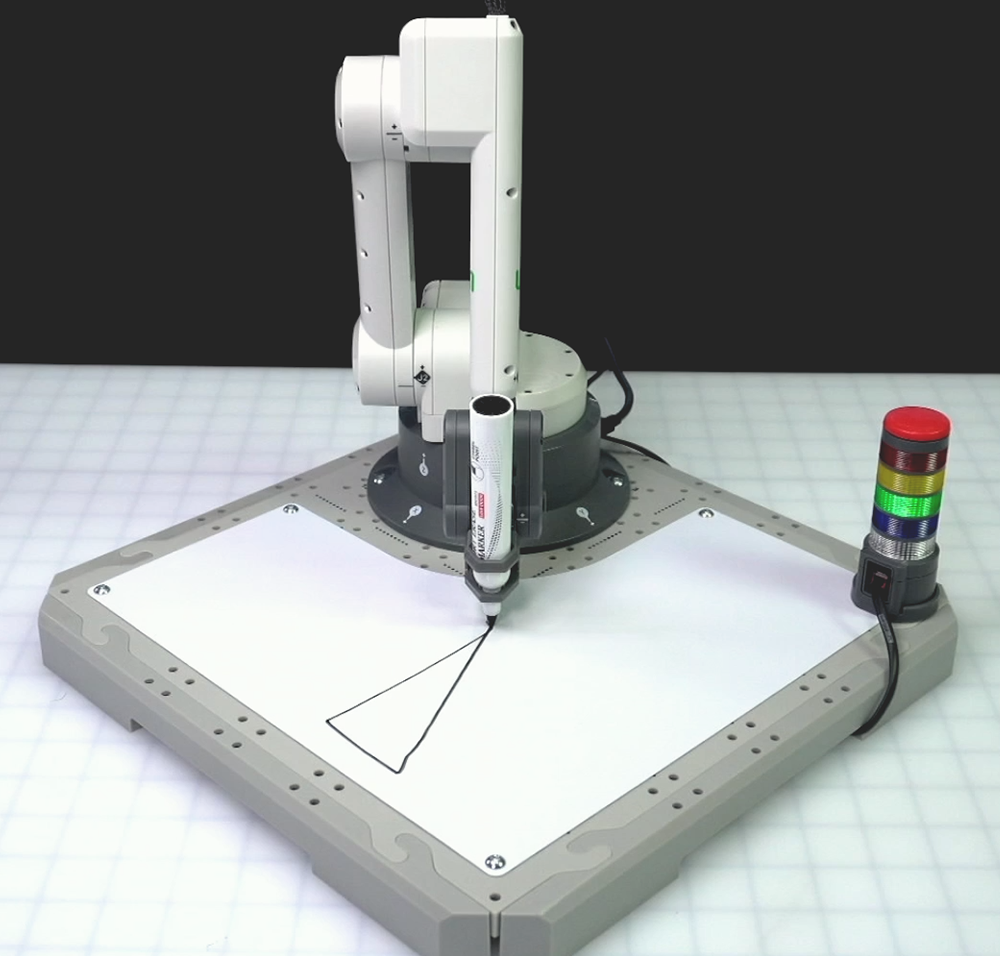
सुनिश्चित करें कि 6-अक्ष आर्म VEXcode से जुड़ा हुआ है। परीक्षण के लिए प्रोजेक्ट चलाएँ।
जब 6-अक्ष भुजा चलना समाप्त कर दे तो प्रोजेक्ट रोक दें।
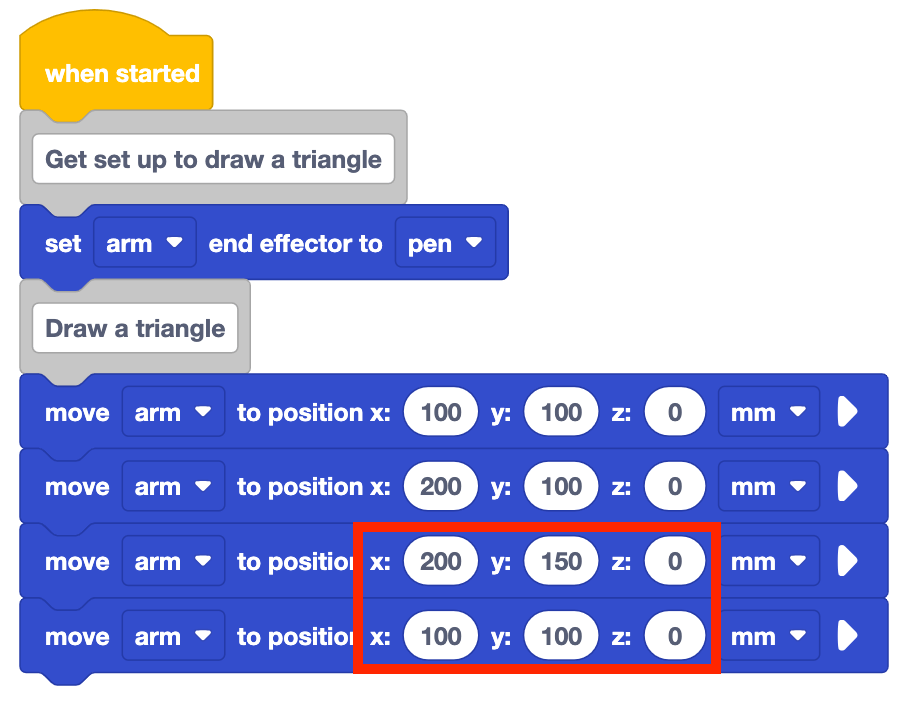
परियोजना में एक और जोड़ें, स्थिति ब्लॉक पर जाएँ। ब्लॉक के पैरामीटर में निर्देशांक (200, 150, 0) दर्ज करें।
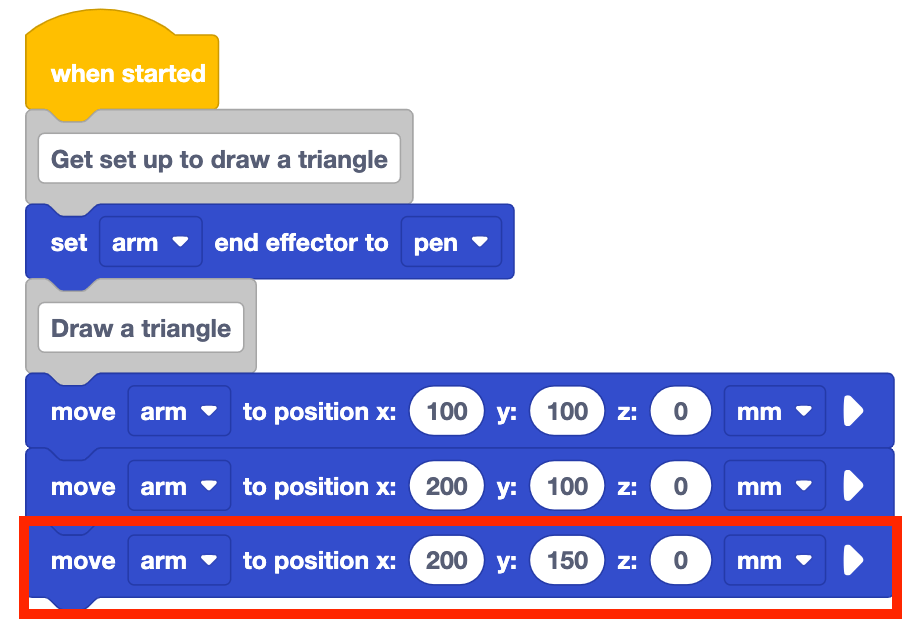
यह त्रिभुज की दूसरी भुजा खींचने के लिए 6-अक्ष भुजा को कोड करेगा।
ध्यान दें कि x-निर्देशांक और z-निर्देशांक समान रहते हैं, लेकिन y-निर्देशांक धनात्मक दिशा में 50 मिमी आगे बढ़ता है। त्रिभुज की इस भुजा को खींचने के लिए 6-अक्ष भुजा को केवल y-अक्ष के अनुदिश चलने की आवश्यकता है।
व्हाइटबोर्ड मिटाएँ. परीक्षण के लिए प्रोजेक्ट चलाएँ।
प्रत्येक बार परीक्षण के बीच व्हाइटबोर्ड को मिटाने से आपको यह स्पष्ट रूप से देखने में मदद मिलेगी कि प्रत्येक बार जब आप प्रोजेक्ट का परीक्षण करते हैं तो पेन क्या चित्र बना रहा है।
जब 6-अक्ष भुजा चलना समाप्त कर दे तो प्रोजेक्ट रोक दें।
परियोजना में एक और जोड़ें, स्थिति ब्लॉक पर जाएँ। ब्लॉक के पैरामीटर में निर्देशांक (100, 100, 0) दर्ज करें।

ध्यान दें कि आप त्रिभुज की तीसरी भुजा बनाने के लिए x और y दोनों निर्देशांक बदल रहे हैं। 6-अक्ष भुजा त्रिभुज के तीसरे बिंदु को प्रारंभिक बिंदु से जोड़ने वाली एक विकर्ण रेखा खींचेगी।
आपकी परियोजना त्रिभुज की तीसरी भुजा को सफलतापूर्वक खींचने के लिए समन्वित तरीके से कई अक्षों पर चलती है।
व्हाइटबोर्ड मिटाएँ. परीक्षण के लिए प्रोजेक्ट चलाएँ।
जब 6-अक्ष भुजा चलना समाप्त हो जाए तो प्रोजेक्ट रोक दें।
अपने प्रोजेक्ट का नाम बदलना और उसे अपने डिवाइस पर सहेजना सुनिश्चित करें।
गतिविधि
अब जब आपने पेन से त्रिभुज बनाने के लिए 6-अक्ष भुजा को कोड करने का अभ्यास कर लिया है, तो आप अपने प्रोजेक्ट में कुछ और जोड़ेंगे ताकि 6-अक्ष भुजा व्हाइटबोर्ड पर एक अतिरिक्त त्रिभुज बना सके।
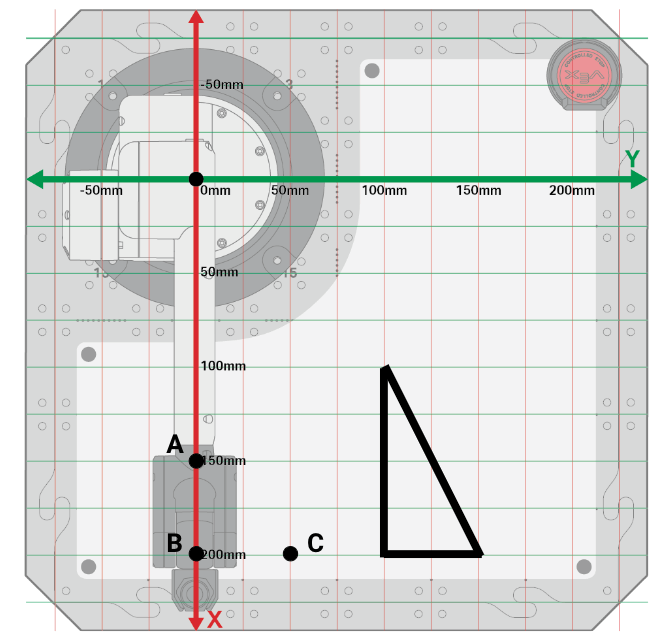
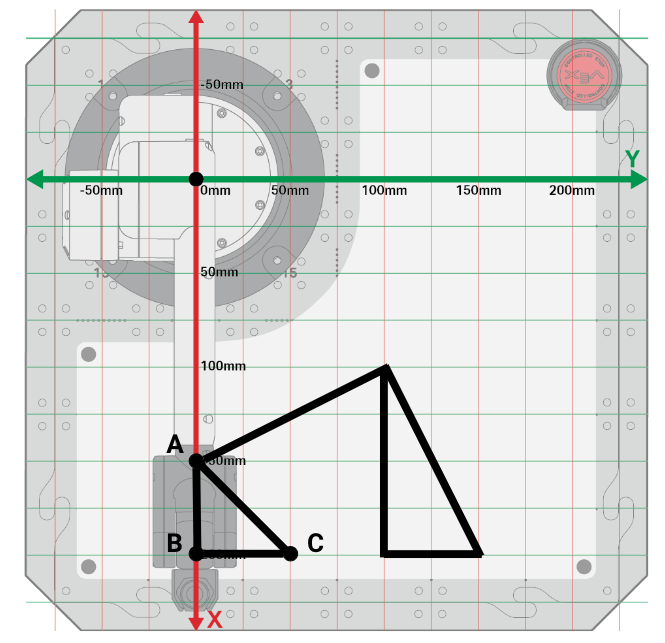
आपके दूसरे त्रिभुज में निम्नलिखित बिंदु होंगे।
- ए (150, 0, 0)
- बी (200, 0, 0)
- सी (200, 50, 0)
गतिविधि: अपने प्रोजेक्ट के अनुसार 6-अक्ष भुजा से व्हाइटबोर्ड पर दूसरा त्रिभुज बनाएं। इस परियोजना को व्यवस्थित करने के लिए टिप्पणियों का उपयोग करें।
- अपने पाठ 2 प्रोजेक्ट में जोड़ें और प्रत्येक व्यवहार का वर्णन करते हुए टिप्पणियां बनाएं, जिसे आप अपने कोड को व्यवस्थित करने के लिए 6-एक्सिस आर्म से पूरा करवाना चाहते हैं।
- दूसरा त्रिभुज बनाने के लिए 6-अक्ष भुजा के लिए अपने प्रोजेक्ट में स्थिति ब्लॉक जोड़ें।
- परीक्षण के लिए प्रोजेक्ट चलाएँ।
- क्या आपने व्हाइटबोर्ड पर दूसरा त्रिभुज बनाया? यदि नहीं, तो अपनी परियोजना को संशोधित करते रहें और सफल होने तक उसका परीक्षण करते रहें।
- प्रोजेक्ट पूरा करने के बाद, प्रोजेक्ट का नाम बदलें और उसे अपने डिवाइस पर सेव करें।
- अपनी परियोजना को अपनी इंजीनियरिंग नोटबुक में दर्ज करके उसका दस्तावेजीकरण करें।
आपकी जानकारी के लिए
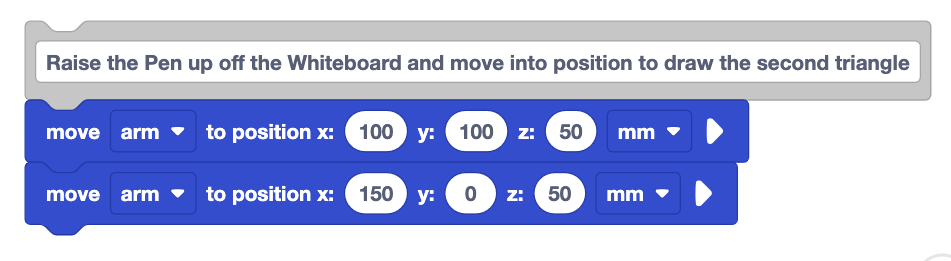
जब आप व्हाइटबोर्ड पर दूसरा त्रिभुज बनाने के लिए अपना प्रोजेक्ट बनाते हैं, तो आपको एक अवांछित रेखा मिल सकती है, जैसे:
- ऐसा इसलिए है क्योंकि जब आप एक त्रिभुज से दूसरे त्रिभुज पर जाते हैं तो पेन व्हाइटबोर्ड पर ही रहता है। आपको 6-अक्ष भुजा को ऊपर उठाने के लिए इसे z-अक्ष के साथ आगे बढ़ाकर ब्लॉक जोड़ने की आवश्यकता होगी। ऐसा करने के लिए, आपको दोमूव टू पोजीशन ब्लॉकों का उपयोग करना होगा - एक हाथ को ऊपर उठाने के लिए, और दूसरा इसे दूसरे त्रिभुज की शुरुआत से ऊपर ले जाने के लिए।
अपनी समझ की जाँच करें
अगले पाठ पर जाने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
मध्य-इकाई प्रतिबिंबन को पूरा करने के लिएअगला >चयन करें।