
![]() أدوات المعلم
-
مخطط النشاط
أدوات المعلم
-
مخطط النشاط
-
سيعرّف هذا الاستكشاف الطلاب على سلوكيات البرمجة الأساسية للتحول إلى اليمين واليسار والانتظار.
-
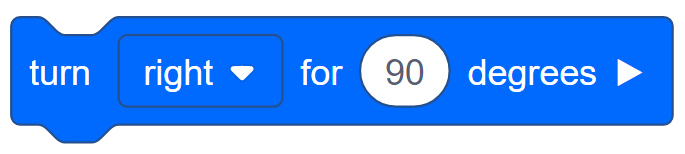
يتيح استخدام تكوين روبوت مجموعة نقل الحركة للطلاب إمكانية برمجة Speedbot للانعطاف بمجرد تحديد كتلة [Turn for] .
Speedbot جاهز للانطلاق!
سيمنحك هذا الاستكشاف الأدوات اللازمة لتتمكن من البدء في إنشاء بعض المشاريع الرائعة ليتبعها Speedbot.
-
VEXcode V5 الذي سيتم استخدامه في هذا الاستكشاف:
-
لمعرفة المزيد من المعلومات حول الكتلة، افتح مساعدة ثم حدد كتلة [Turn for].

-
تأكد من حصولك على الأجهزة المطلوبة، وتنزيل دفتر الملاحظات الهندسي الخاص بك، وتنزيل VEXcode V5 وجاهزيته.
![]() نصائح المعلم
نصائح المعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode V5، فيمكنه الرجوع إلى البرامج التعليمية في أي وقت أثناء هذا الاستكشاف. توجد البرامج التعليمية في شريط الأدوات.

| كمية | المواد المطلوبة |
|---|---|
| 1 |
روبوت سبيدبوت |
| 1 |
بطارية الروبوت المشحونة |
| 1 |
فيكس كود V5 |
| 1 |
كابل USB (في حالة استخدام جهاز كمبيوتر) |
| 1 |
دفتر الهندسة |
![]() نصائح المعلم
نصائح المعلم
-
قم بتصميم كل خطوة من الخطوات للتأكد من أن Speedbot جاهز حتى يعتاد الطلاب على القيام بذلك.
الخطوة 1: التحضير للاستكشاف
قبل أن تبدأ النشاط، هل قمت بتجهيز كل عنصر من هذه العناصر؟ تحقق من كل مما يلي:
-
هل تم إدخال الكابلات الذكية بالكامل في جميع المحركات؟
-
هل الدماغ قيد التشغيل؟
-
هل البطارية مشحونة؟
الخطوة الثانية: ابدأ مشروعًا جديدًا
قبل أن تبدأ مشروعك، حدد Speedbot (نظام الدفع بمحركين، بدون جيرو) - مشروع القالب. يحتوي مشروع القالب على تكوين محرك Speedbot. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.

أكمل الخطوات التالية لفتح مشروع القالب:
-
افتح القائمة ملف.
-
حدد افتح الأمثلة.
-
حدد قالب Speedbot (مجموعة نقل الحركة بمحركين، بدون جيرو) وافتحه المشروع.
-
نظرًا لأننا سنستخدم الكتلة [Turn for]، فأعد تسمية مشروعك Turn.
-
احفظ مشروعك.
-
تحقق للتأكد من اسم المشروع اقلب موجود الآن في النافذة الموجودة في منتصف شريط الأدوات.

![]() أدوات المعلم
-
حفظ المشاريع
أدوات المعلم
-
حفظ المشاريع

وضح أنه عندما فتحوا VEXcode V5 لأول مرة، كانت النافذة تحمل اسم مشروع VEXcode ولم يتم حفظه (المشار إليه في شريط الأدوات). VEXcode Project هو اسم المشروع الافتراضي عند فتح VEXcode V5 لأول مرة. بمجرد إعادة تسمية المشروع إلى Turn وحفظه، يتم تحديث العرض إلى Saved. باستخدام هذه النافذة في شريط الأدوات، من السهل التحقق من أن الطلاب يستخدمون المشروع الصحيح ومن حفظه. بمجرد حفظ المشروع في البداية، يقوم VEXcode V5 بحفظ أي تغييرات لاحقة تلقائيًا، كما هو موضح بالرسالة الموجودة بجوار اسم المشروع.
أخبر الطلاب أنهم الآن جاهزون لبدء مشروعهم الأول. اشرح للطلاب أنه من خلال اتباع بعض الخطوات البسيطة، سيتمكنون من إنشاء وتشغيل مشروع من شأنه تشغيل Speedbot.
![]() نصائح المعلم
نصائح المعلم
-
نظرًا لأن هذا هو نشاط البداية في البرمجة، فيجب على المعلم أن يصمم الخطوات، ثم يطلب من الطلاب إكمال نفس الإجراءات. ويجب على المعلم بعد ذلك مراقبة الطلاب للتأكد من أنهم يتبعون الخطوات بشكل صحيح.
-
تأكد من أن الطلاب قد اختاروا فتح أمثلة من القائمة "ملف".
-
تأكد من أن الطلاب قد اختاروا قالب Speedbot (نظام الدفع بمحركين، بدون جيرو) مشروع.
يمكنك الإشارة للطلاب إلى وجود عدة اختيارات للاختيار من بينها في أمثلة صفحة. أثناء قيامهم ببناء واستخدام الروبوتات الأخرى، سيكون لديهم فرصة لاستخدام قوالب مختلفة.
-
يمكنك أن تطلب من الطلاب إضافة الأحرف الأولى من أسمائهم أو اسم مجموعتهم إلى اسم المشروع. سيساعد هذا في التمييز بين المشاريع إذا طلبت من الطلاب إرسالها.
الخطوة 3: انعطف يمينًا
-
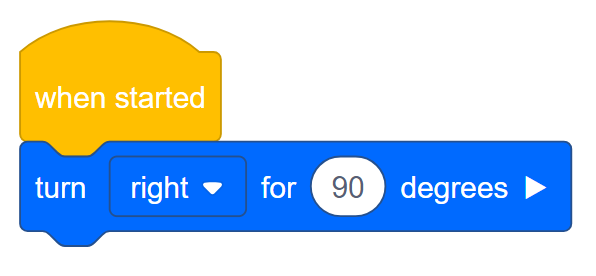
أضف كتلة [Turn for] إلى كتلة {When started} في منطقة البرمجة.

-
انقر على أيقونة الفتحة . يمكنك تنزيل مشروعك إلى إحدى فتحات الأربع المتاحة في دماغ الروبوت. انقر على الرقم 1.

-
قم بتوصيل الروبوت بجهاز الكمبيوتر أو الجهاز اللوحي. يتحول رمز Brain الموجود في شريط الأدوات إلى اللون الأخضر بمجرد إجراء اتصال ناجح.

-
انقر على تنزيل على شريط الأدوات لتنزيل مشروع Turn to the Robot Brain.
![]() أدوات المعلم
-
مساعدة في الكتل
أدوات المعلم
-
مساعدة في الكتل
-
وضح أنه في منطقة البرمجة، توجد بالفعل كتلة {When started} هناك بشكل افتراضي. سيبدأ كل مشروع بهذه الكتلة. عند بدء المشروع، سيتم اتباع الكتل المتصلة بالتسلسل الذي تم وضعها فيه.
وضح النقر على الكتلة [Turn for] وسحبها إلى منطقة البرمجة، وربطها بالكتل {When started} . سوف تسمع نقرة عندما يتم إرفاقها.
-
إذا كنت تستخدم جهاز كمبيوتر، فيجب أن يكون VEX V5 Robot Brain متصلاً بالكمبيوتر باستخدام كابل USB. إذا كنت تستخدم جهازًا لوحيًا، فيجب توصيل VEX V5 Robot Brain بالكمبيوتر اللوحي باستخدام الراديو الذكي.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، فاطلب منهم الآن فصل كابل USB عن Robot Brain. قد يؤدي توصيل الروبوت بجهاز كمبيوتر أثناء تشغيل المشروع إلى قيام الروبوت بسحب كابل الاتصال.
![]() أدوات المعلم
-
توقف وناقش
أدوات المعلم
-
توقف وناقش
هذه نقطة جيدة للتوقف مؤقتًا وجعل الطالب يفكر في تشغيل مشروعه الأول. كطلاب:
-
ماذا فعل Speedbot عندما قمت بإدارة المشروع؟
-
هل تصرفت كما كنت تتوقعها، بناءً على المشروع؟
خذ لحظة للتأكد من أن جميع الطلاب قد أكملوا هذه الخطوة دون أي مشاكل قبل المضي قدمًا.

-
تحقق للتأكد من تنزيل مشروعك على Speedbot's Brain من خلال النظر إلى شاشة Robot Brain. يجب إدراج اسم المشروع في الفتحة 1.
![]() صندوق أدوات المعلم
-
النموذج الأول
صندوق أدوات المعلم
-
النموذج الأول
قم بإنشاء نموذج لتشغيل المشروع أمام الفصل قبل أن يحاول جميع الطلاب في وقت واحد. اجمع الطلاب في منطقة واحدة واترك مساحة كافية لتحرك Speedbot إذا تم وضعه على الأرض. نظرًا لأن Speedbot سيستمر في تشغيل المشروع حتى يتم الضغط على زر الرجوع الموجود على Robot Brain، فقد يرغب المعلم في اختيار شخص ما للمساعدة في إيقاف مشروع Speedbot عند انتهائه.
أخبر الطلاب أن دورهم قد حان الآن لتشغيل مشروعهم. تأكد من أن لديهم مسارًا واضحًا وأنه لن تصطدم أجهزة Speedbots ببعضها البعض.

![]() أدوات المعلم
-
إكمال الخطوة 4
أدوات المعلم
-
إكمال الخطوة 4
-
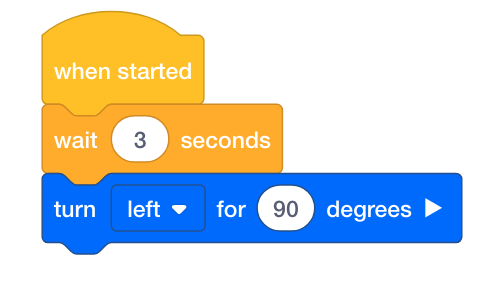
لتغيير الكتلة [Turn for] من اليمين إلىاليسار، ما عليك سوى النقر على القائمة المنسدلة وتحديد اليسار.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، فذكّرهم بفصل كابل USB عن Robot Brain قبل تشغيل المشروع.
نظرًا لأننا لم نحدد فتحة جديدة، فسيتم تنزيل المشروع الجديد إلى الفتحة 1 واستبدال المشروع السابق.
-
نظرًا لأن VEXcode V5 يحتوي على خاصية الحفظ التلقائي، فليست هناك حاجة لحفظ المشروع مرة أخرى.
الخطوة 5: انتظر، ثم انعطف يسارًا
![]() أدوات المعلم
-
إكمال الخطوة 5
أدوات المعلم
-
إكمال الخطوة 5
-
يمكن وضع كتلة [Wait] في أي مكان في المشروع. لمزيد من المعلومات حول الكتلة [Wait] ، افتح الكتلة مساعدة.
-
لن يؤدي استخدام كتلة [Wait] إلى إنهاء المشروع.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، فذكّرهم بفصل كابل USB عن Robot Brain قبل تشغيل المشروع.
-
نظرًا لأن VEXcode V5 يحتوي على خاصية الحفظ التلقائي، فليست هناك حاجة لحفظ المشروع مرة أخرى.
![]() تحفيز المناقشة
-
فهم الكتل
تحفيز المناقشة
-
فهم الكتل
س: عرض الوضع الحالي للروبوت عند درجة الصفر، إذا استدار الروبوت يسارًا بمقدار 90 درجة، ثم انعطف يمينًا بمقدار 120 درجة، وانتهى بالدوران يسارًا بمقدار 40 درجة، فما عدد الدرجات التي سيصل إليها الروبوت حاليًا بعد الانتهاء من الدوران؟
أ: سيكون الروبوت عند 10 درجات. وبعد الانعطاف إلى اليسار بمقدار 90 درجة، استدار الروبوت إلى اليمين بمقدار 120 درجة. النظر إلى الانعطاف يسارًا على أنه تحرك في اتجاه إيجابي والانعطاف يمينًا على أنه طرح أو تحرك في اتجاه سلبي - على غرار مستوى الإحداثيات س وص، وهذا الآن يضع الروبوت عند -30 درجة. بما أن 90-120 = -30. من -30 درجة، يتحول الروبوت إلى اليسار بمقدار 40 درجة. وبالتالي، -30 + 40 = 10. ينتهي الروبوت عند 10 درجات.
س: عرض الوضع الحالي للروبوت عند درجة الصفر، إن تحويل الروبوت 30 درجة إلى اليمين سيؤدي إلى إنهاء الروبوت في نفس المكان حيث يبدأ من الصفر ويدير الروبوت 330 درجة إلى اليسار. إذا استدار الروبوت إلى اليمين بزاوية 56 درجة، فكم درجة إلى اليسار سيتعين على الروبوت أن ينعطف لينتهي في نفس المكان على افتراض أنه يبدأ من صفر درجة؟
أ: نظرًا لأن دوران الروبوت بالكامل يبلغ 360 درجة، فيمكنك الجمع والطرح من 360 درجة لحساب كيفية دوران الروبوت. 360 - 56 = 304. وبالتالي، سيتعين على الروبوت أن يدور 304 درجة إلى اليسار لينتهي في نفس المكان الذي يدور فيه 56 درجة إلى اليمين.
الخطوة 6: أكمل تحدي الكاميرا الأمنية!

 في تحدي الكاميرا الأمنية، يجب أن يبدأ الروبوت بالتحول إلى اليمين بزاوية 90 درجة. سيتحول الروبوت بعد ذلك إلى اليسار بمقدار 180 درجة ثم إلى اليمين بمقدار 180 درجة "للمسح" تمامًا مثل الكاميرا الأمنية. سيكرر الروبوت بعد ذلك الدوران 180 درجة إلى اليسار و180 درجة إلى اليمين مرتين إضافيتين. وبالتالي، سيقوم الروبوت بمسح 180 درجة ثلاث مرات إجمالاً.
في تحدي الكاميرا الأمنية، يجب أن يبدأ الروبوت بالتحول إلى اليمين بزاوية 90 درجة. سيتحول الروبوت بعد ذلك إلى اليسار بمقدار 180 درجة ثم إلى اليمين بمقدار 180 درجة "للمسح" تمامًا مثل الكاميرا الأمنية. سيكرر الروبوت بعد ذلك الدوران 180 درجة إلى اليسار و180 درجة إلى اليمين مرتين إضافيتين. وبالتالي، سيقوم الروبوت بمسح 180 درجة ثلاث مرات إجمالاً.
قبل برمجة الروبوت، قم بتخطيط مسار الروبوت وسلوكياته في دفتر الملاحظات الهندسي الخاص بك.
بعد إكمال تحدي كاميرا الأمان، ستتمكن من الجمع بين الحركات الأمامية والخلفية مع سلوكيات الروبوت الإضافية لإكمال التحديات الأكثر تقدمًا.


![]() نصائح المعلم
نصائح المعلم
تحقق من أن الروبوت قد أكمل التحدي بنجاح من خلال مشاهدة موضع البداية للروبوت، وقم بالعد للتأكد من أن الروبوت قد قام بالإجراءات الصحيحة. يجب أن يستدير الروبوت يمينًا بمقدار 90 درجة، ثم يكرر ذلك ثلاث مرات: انعطف يسارًا بمقدار 180 درجة وانعطف يمينًا بمقدار 180 درجة.