
![]() 教师工具箱
-
活动大纲
教师工具箱
-
活动大纲
-
这次探索将向学生介绍基本的右转、左转和等待编程行为。
-
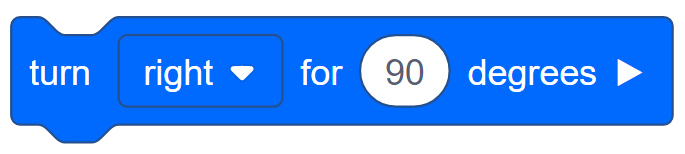
使用动力传动系统机器人配置,学生只需选择 [Turn for] 块即可对 Speedbot 进行编程以进行转弯。
Speedbot 已准备好转弯!
这次探索将为您提供工具,使您能够开始为您的 Speedbot 创建一些很酷的项目。
-
本次探索将使用的 VEXcode V5 :
-
要了解有关该区块的更多信息,请打开 帮助 ,然后选择 [Turn for] 区块。

-
确保您拥有所需的硬件、工程笔记本,并且已下载并准备好 VEXcode V5。
![]() 教师提示
教师提示
如果这是学生第一次使用 VEXcode V5,他们可以在探索过程中随时参考教程。 教程位于工具栏中。

| 数量 | 所需材料 |
|---|---|
| 1 |
Speedbot 机器人 |
| 1 |
充电机器人电池 |
| 1 |
VEX代码 V5 |
| 1 |
USB 电缆(如果使用电脑) |
| 1 |
工程笔记本 |
![]() 教师提示
教师提示
-
对检查 Speedbot 是否准备就绪的每个步骤进行建模,以便学生养成这样做的习惯。
第一步:准备探索
在开始活动之前,您是否已准备好以下每件物品? 检查下列各项:
第 2 步:开始新项目
在开始项目之前,请选择 Speedbot(传动系统 2 个电机,无陀螺仪)-模板项目。 模板项目包含 Speedbot 的电机配置。 如果不使用模板,您的机器人将无法正确运行项目。

完成以下步骤来打开模板项目:
-
打开文件菜单。
-
选择 打开示例。
-
选择并打开 Speedbot(传动系统 2 电机,无陀螺仪)模板 项目。
-
由于我们将使用 [Turn for] 块,因此将项目重命名为 Turn.
-
保存 您的项目。
-
检查确保项目名称 Turn 现在位于工具栏中心的窗口中。

![]() 教师工具箱
-
保存项目
教师工具箱
-
保存项目

指出,当他们第一次打开VEXcode V5时,窗口标记为 VEXcode Project ,并且未保存(在工具栏上显示)。 VEXcode Project 是首次打开 VEXcode V5 时的默认项目名称。 一旦项目重命名为 Turn 并保存,显示就会更新为“已保存”。 使用工具栏中的这个窗口,可以轻松检查学生是否使用了正确的项目以及是否已保存。 一旦项目首次保存,VEXcode V5 会自动保存任何后续更改,如项目名称旁边的消息所示。
告诉学生他们现在已经准备好开始他们的第一个项目了。 向学生解释,通过遵循几个简单的步骤,他们将能够创建并运行一个可以转动 Speedbot 的项目。
![]() 教师提示
教师提示
-
因为这是编程的初级活动,所以老师应该示范步骤,然后让学生完成相同的操作。 然后,老师应该监督学生,以确保他们正确地遵循这些步骤。
-
确保学生已从文件菜单中选择了打开 示例 。
-
确保学生选择了 Speedbot(传动系统 2 个电机,无陀螺仪)模板 项目。
您可以向学生指出, 示例 页面上有几个选项可供选择。 当他们建造和使用其他机器人时,他们将有机会使用不同的模板。
-
您可以要求学生在项目名称中添加他们的姓名首字母或小组名称。 如果您要求学生提交项目,这将有助于区分它们。
步骤 3: 右转
-
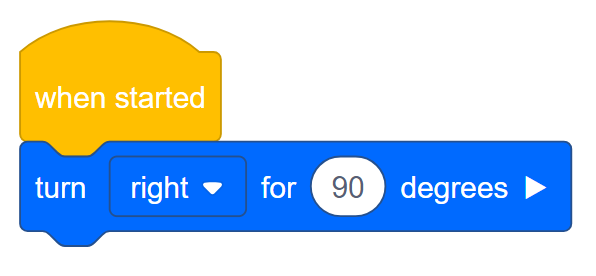
在编程区中,将【转向】块添加到 {When started} 块中。


-
将机器人连接到您的计算机或平板电脑。 一旦连接成功,工具栏中的 Brain 图标就会变为绿色。

-
点击工具栏上的 Download 按钮,将Turn项目下载到Robot Brain。
![]() 教师工具箱
-
积木帮助
教师工具箱
-
积木帮助
-
指出在编程区域中,默认已经有一个 {When started} 块位于那里。 每个项目都将从这个区块开始。 当项目启动时,连接的块将按照其放置的顺序进行。
演示点击[Turn for]块并拖拽至编程区域,连接到 {When started} 块。 当它连接时你会听到咔的一声。
-
如果您使用计算机,学生应该使用 USB 电缆将 VEX V5 机器人大脑连接到计算机。 如果您使用平板电脑,VEX V5 机器人大脑应该使用智能无线电连接到平板电脑。
-
如果学生正在使用计算机,请他们现在断开机器人大脑上的 USB 电缆。 在运行项目时将机器人连接到计算机可能会导致机器人拉动连接线。
![]() 教师工具箱
-
停下来讨论
教师工具箱
-
停下来讨论
这是暂停并让学生反思运行他们的第一个项目的好时机。 作为学生:
-
当您运行该项目时,Speedbot 做了什么?
-
根据项目,它的表现是否符合您的预期?
在继续之前,请花点时间确保所有学生都已顺利完成此步骤。

-
通过查看机器人大脑的屏幕,检查以确保您的项目已下载到 Speedbot 的大脑。 项目名称应列在 槽 1中。
![]() 教师工具箱
-
模型优先
教师工具箱
-
模型优先
在让所有学生同时尝试之前,先在班级面前示范运行该项目。 将学生聚集在一个区域,如果 Speedbot 放在地板上,则要留出足够的移动空间。 由于 Speedbot 将继续运行项目,直到按下 Robot Brain 上的后退按钮,因此老师可能需要选择某人在 Speedbot 项目完成后协助停止它。
告诉学生现在轮到他们运行他们的项目了。 确保它们有一条畅通的路径并且没有 Speedbot 会互相碰撞。
-
确保选择了该项目,然后按下运行按钮,在 Speedbot 机器人上运行该项目。
第四步:左转

-
将 [Turn for] 更改为显示 left 而不是 right。
-
下载 项目。
-
在 Speedbot 机器人上运行 该项目,确保选择了该项目,然后按下运行按钮。
![]() 教师工具箱
-
完成第 4 步
教师工具箱
-
完成第 4 步
-
要将 [转向] 块从 右 更改为 左,只需单击下拉菜单并选择 左。
-
如果学生正在使用电脑,请提醒他们在运行项目之前断开 Robot Brain 的 USB 电缆。
因为我们没有选择新的插槽,所以新项目将下载到插槽 1 并替换之前的项目。
-
由于 VEXcode V5 具有自动保存功能,因此无需再次保存项目。
步骤 5: 等待,然后左转
-
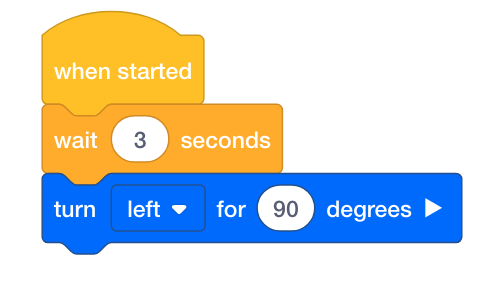
在 [Turn for] 块前添加一个 [Wait] 块。 这将告诉机器人在左转之前等待。
-
在 [等待] 块中插入三秒。 这告诉机器人等待三次才转弯。
-
下载 项目。
-
在 Speedbot 机器人上运行 该项目,确保选择了该项目,然后按下运行按钮。
![]() 教师工具箱
-
完成第 5 步
教师工具箱
-
完成第 5 步
-
[等待] 块可以放置在项目中的任何位置。 有关 [等待] 块的更多信息,请打开 帮助。
-
使用 [等待] 块不会结束项目。
-
如果学生正在使用电脑,请提醒他们在运行项目之前断开 Robot Brain 的 USB 电缆。
-
由于 VEXcode V5 具有自动保存功能,因此无需再次保存项目。
![]() 激发讨论
-
理解积木
激发讨论
-
理解积木
问: 查看机器人的当前位置为零度,如果机器人左转 90 度,然后右转 120 度,最后左转 40 度,那么机器人完成转弯后当前位于多少度?
答: 机器人将位于 10 度。 机器人左转90度后,又右转120度。 将左转视为向正方向移动,将右转视为减法或向负方向移动 - 类似于 xy 坐标平面,现在将机器人置于 -30 度。 因为 90-120 = -30。 从-30度开始,机器人向左转40度。 因此,-30 + 40 = 10。 机器人在10度时结束。
问: 查看机器人的当前位置为零度,将机器人向右旋转 30 度将使机器人在与从零度开始并向左旋转 330 度相同的位置完成。 如果机器人向右转了 56 度,那么假设从零度开始,机器人需要向左转多少度才能回到原点?
A: 由于机器人完全转动是 360 度,因此您可以通过加减 360 度来计算机器人需要转动多少度。 360-56=304。 因此,机器人必须向左旋转 304 度才能到达与向右旋转 56 度相同的位置。
第 6 步:完成安全摄像头挑战!

 在安全摄像头挑战赛中,机器人必须首先向右旋转 90 度。 然后,机器人会向左旋转 180 度,再向右旋转 180 度,就像安全摄像头一样“扫描”。 然后,机器人将重复向左旋转 180 度和向右旋转 180 度两次。 因此,机器人将总共扫描180度三次。
在安全摄像头挑战赛中,机器人必须首先向右旋转 90 度。 然后,机器人会向左旋转 180 度,再向右旋转 180 度,就像安全摄像头一样“扫描”。 然后,机器人将重复向左旋转 180 度和向右旋转 180 度两次。 因此,机器人将总共扫描180度三次。
在对机器人进行编程之前,请先在工程笔记本中规划出机器人的路径和行为。
完成安全摄像头挑战后,您将能够将前进和后退移动与其他机器人行为相结合,以完成更高级的挑战。


![]() 教师提示
教师提示
通过观察机器人的起始位置来验证机器人是否成功完成挑战,并进行计数以确保机器人执行了正确的动作。 机器人应该向右转 90 度,然后重复三次:向左转 180 度,向右转 180 度。