
![]() Boîte à outils de l'enseignant
-
Plan d'activité
Boîte à outils de l'enseignant
-
Plan d'activité
-
Cette exploration présentera aux étudiants les comportements de programmation de base pour tourner à droite, à gauche et en attente.
-
L'utilisation de la configuration du robot de transmission permet aux étudiants de programmer le Speedbot pour qu'il tourne en sélectionnant simplement le bloc [Tourner pour] .
Speedbot est prêt à tourner !
Cette exploration vous donnera les outils nécessaires pour pouvoir commencer à créer des projets sympas que votre Speedbot pourra suivre.
-
VEXcode V5 qui sera utilisé dans cette exploration :

-
Assurez-vous que vous disposez du matériel requis, de votre cahier d'ingénierie et de VEXcode V5 téléchargés et prêts.
![]() Conseils aux enseignants
Conseils aux enseignants
Si c'est la première fois que l'étudiant utilise VEXcode V5, il peut référencer les Tutoriels à tout moment au cours de cette exploration. Les didacticiels se trouvent dans la barre d'outils.

| Quantité | Les matériaux nécessaires |
|---|---|
| 1 |
Robot robot rapide |
| 1 |
Batterie de robot chargée |
| 1 |
Code VEX V5 |
| 1 |
Câble USB (si vous utilisez un ordinateur) |
| 1 |
Cahier d'ingénierie |
![]() Conseils aux enseignants
Conseils aux enseignants
-
Modélisez chacune des étapes permettant de vérifier que le Speedbot est prêt afin que les élèves prennent l'habitude de le faire.
Étape 1 : Préparation de l'exploration
Avant de commencer l’activité, avez-vous préparé chacun de ces éléments ? Vérifiez chacun des éléments suivants :
-
Les câbles intelligents sont-ils entièrement insérés dans tous les moteurs ?
-
Le cerveau est-il activé ?
-
La batterie est-elle chargée ?
Étape 2 : Démarrer un nouveau projet
Avant de commencer votre projet, sélectionnez le projet Speedbot (Drivetrain 2-motors, No Gyro) - Template. Le projet modèle contient la configuration du moteur du Speedbot. Si le modèle n'est pas utilisé, votre robot n'exécutera pas le projet correctement.

Effectuez les étapes suivantes pour ouvrir le projet modèle :
-
Ouvrez le menu Fichier.
-
Sélectionnez Exemples ouverts.
-
Sélectionnez et ouvrez le modèle Speedbot (Drivetrain 2-motors, No Gyro) projet.
-
Puisque nous utiliserons le bloc [Turn for], renommez votre projet Turn.
-
Enregistrez votre projet.
-
Vérifiez que le nom du projet tourne se trouve maintenant dans la fenêtre au centre de la barre d'outils.

![]() Boîte à outils de l'enseignant
-
Sauvegarde de projets
Boîte à outils de l'enseignant
-
Sauvegarde de projets

Faites remarquer que lorsqu'ils ont ouvert VEXcode V5 pour la première fois, la fenêtre était étiquetée Projet VEXcode et il n'a pas été enregistré (indiqué dans la barre d'outils). VEXcode Project est le nom de projet par défaut lors de la première ouverture de VEXcode V5. Une fois le projet renommé Turn et enregistré, l'affichage se met à jour et devient Saved. Grâce à cette fenêtre de la barre d'outils, il est facile de vérifier que les étudiants utilisent le bon projet et celui-ci est enregistré. Une fois qu'un projet est initialement enregistré, VEXcode V5 enregistre automatiquement toutes les modifications ultérieures, comme indiqué par le message à côté du nom du projet.
Dites aux élèves qu’ils sont maintenant prêts à commencer leur premier projet. Expliquez aux élèves qu'en suivant quelques étapes simples, ils pourront créer et exécuter un projet qui fera tourner le Speedbot.
![]() Conseils aux enseignants
Conseils aux enseignants
-
Puisqu’il s’agit d’une activité débutant avec la programmation, l’enseignant doit modéliser les étapes, puis demander aux élèves de réaliser les mêmes actions. L'enseignant doit ensuite surveiller les élèves pour s'assurer qu'ils suivent correctement les étapes.
-
Assurez-vous que les élèves ont sélectionné Ouvrir Exemples dans le menu Fichier.
-
Assurez-vous que les élèves ont sélectionné le modèle de projet Speedbot (Drivetrain 2-motors, No Gyro) .
Vous pouvez indiquer aux étudiants qu'il existe plusieurs sélections parmi lesquelles choisir sur le Exemples page. Au fur et à mesure qu’ils construisent et utilisent d’autres robots, ils auront la possibilité d’utiliser différents modèles.
-
Vous pouvez demander aux étudiants d'ajouter leurs initiales ou le nom de leur groupe au nom du projet. Cela permettra de différencier les projets si vous demandez aux étudiants de les soumettre.
Étape 3 : Tournez à droite
-
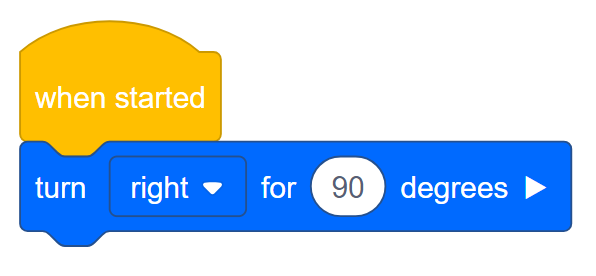
Ajoutez le bloc [Tourner pour] au bloc {When started} dans la zone de programmation.

-
Cliquez sur l'icône Slot. Vous pouvez télécharger votre projet sur l'un des quatre emplacements disponibles dans le cerveau du robot. Cliquez sur le numéro 1.

-
Connectez le robot à votre ordinateur ou tablette. L'icône Cerveau dans la barre d'outils devient verte une fois qu'une connexion réussie a été établie.

-
Cliquez sur Télécharger sur la barre d'outils pour télécharger le projet Turn vers le Robot Brain.
![]() Boîte à outils de l'enseignant
-
Aide sur les blocs
Boîte à outils de l'enseignant
-
Aide sur les blocs
-
Précisez que dans la zone de programmation, il y a déjà un bloc {When started} qui s'y trouve par défaut. Chaque projet commencera par ce bloc. Lorsque le projet démarre, les blocs connectés seront suivis dans l'ordre dans lequel ils sont placés.
Faites une démonstration en cliquant sur le bloc [Tourner pour] et en le faisant glisser vers la zone de programmation, en le connectant au bloc {When started} . Vous entendrez un clic lors de la fixation.
-
Si vous utilisez un ordinateur, l'élève doit avoir VEX V5 Robot Brain connecté à l'ordinateur à l'aide d'un câble USB. Si vous utilisez une tablette, le VEX V5 Robot Brain doit être connecté à la tablette à l'aide de la Smart Radio.
-
Si les élèves utilisent un ordinateur, demandez-leur maintenant de débrancher le câble USB du Robot Brain. Le fait que le robot soit connecté à un ordinateur pendant l'exécution d'un projet pourrait amener le robot à tirer sur le câble de connexion.
![]() Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
C'est un bon moment pour faire une pause et demander à l'étudiant de réfléchir à la réalisation de son premier projet. En tant qu'étudiants :
-
Qu'a fait Speedbot lorsque vous avez dirigé le projet ?
-
Est-ce qu'il s'est comporté comme vous l'attendiez, en fonction du projet ?
Prenez un moment pour vous assurer que tous les élèves ont terminé cette étape sans aucun problème avant de passer à autre chose.

-
Vérifiez que votre projet a été téléchargé sur le cerveau du Speedbot en regardant l'écran du cerveau du robot. Le nom du projet doit être répertorié dans emplacement 1.
![]() Boîte à outils de l'enseignant
-
Modèle d'abord
Boîte à outils de l'enseignant
-
Modèle d'abord
Modélisez l’exécution du projet devant la classe avant de demander à tous les élèves de l’essayer en même temps. Rassemblez les élèves dans une zone et laissez suffisamment d’espace pour que le Speedbot puisse se déplacer s’il est posé sur le sol. Étant donné que le Speedbot continuera à exécuter le projet jusqu'à ce que le bouton de retour du Robot Brain soit enfoncé, l'enseignant souhaitera peut-être choisir quelqu'un pour l'aider à arrêter le projet du Speedbot une fois celui-ci terminé.
Dites aux élèves que c'est maintenant à leur tour de réaliser leur projet. Assurez-vous qu'ils ont un chemin dégagé et qu'aucun Speedbots ne se croisera.
-
Exécutez le projet sur le robot Speedbot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter.
Étape 4 : tournez à gauche

-
Changez le [Tourner pour] pour afficher gauche au lieu de droite.
-
Téléchargez le projet.
-
Exécutez le projet sur le robot Speedbot en vous assurant que Le projet est sélectionné, puis appuyez sur le bouton Exécuter.
![]() Boîte à outils de l'enseignant
-
Terminer l'étape 4
Boîte à outils de l'enseignant
-
Terminer l'étape 4
-
Pour modifier le bloc [Tourner pour] de droite à gauche, cliquez simplement sur le menu déroulant et sélectionnez gauche.
-
Si les élèves utilisent un ordinateur, rappelez-leur de débrancher le câble USB de Robot Brain avant de lancer le projet.
Comme nous ne sélectionnons pas de nouvel emplacement, le nouveau projet sera téléchargé sur l'emplacement 1 et remplacera le projet précédent.
-
Étant donné que VEXcode V5 dispose d'une sauvegarde automatique, il n'est pas nécessaire de sauvegarder à nouveau le projet.
Étape 5 : Attendez, puis tournez à gauche
-
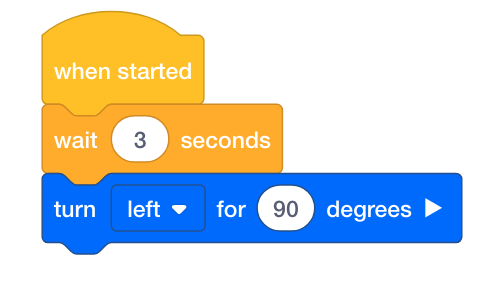
Ajoutez un bloc [Attendez] avant le bloc [Tourner pour] . Cela indiquera au robot d'attendre avant de tourner à gauche.
-
Insérez trois secondes dans le bloc [Wait] . Cela indique au robot d'attendre trois avant de tourner.
-
Téléchargez le projet.
-
Exécutez le projet sur le robot Speedbot en vous assurant que Le projet est sélectionné, puis appuyez sur le bouton Exécuter.
![]() Boîte à outils de l'enseignant
-
Terminer l'étape 5
Boîte à outils de l'enseignant
-
Terminer l'étape 5
-
Un bloc [Wait] peut être placé n'importe où dans le projet. Pour plus d'informations sur le bloc [Wait] , ouvrez le Aide.
-
L'utilisation d'un bloc [Wait] ne mettra pas fin au projet.
-
Si les élèves utilisent un ordinateur, rappelez-leur de débrancher le câble USB de Robot Brain avant de lancer le projet.
-
Étant donné que VEXcode V5 dispose d'une sauvegarde automatique, il n'est pas nécessaire de sauvegarder à nouveau le projet.
![]() Motiver la discussion
-
Comprendre les blocages
Motiver la discussion
-
Comprendre les blocages
Q : Visualisation de la position actuelle du robot à zéro degré, Si le robot tournait à gauche de 90 degrés, puis à droite de 120 degrés et finissait par tourner à gauche de 40 degrés, à combien de degrés se trouverait actuellement le robot après avoir fini de tourner ?
A : Le robot sera à 10 degrés. Après avoir tourné à gauche de 90 degrés, le robot a tourné à droite de 120 degrés. En considérant tourner à gauche comme un déplacement dans une direction positive et tourner à droite comme une soustraction ou un déplacement dans une direction négative - similaire à un plan de coordonnées xy, cela place désormais le robot à -30 degrés. Puisque 90-120 = -30. À partir de -30 degrés, le robot tourne à gauche de 40 degrés. Ainsi, -30 + 40 = 10. Le robot termine à 10 degrés.
Q : Visualisation de la position actuelle du robot à zéro degré, En tournant le robot de 30 degrés vers la droite, le robot finira au même endroit qu'en partant de zéro degré et en tournant le robot de 330 degrés vers la gauche. Si le robot a tourné à droite de 56 degrés et de combien de degrés vers la gauche le robot devra-t-il tourner pour se terminer au même endroit en supposant qu'il part de zéro degré ?
A : Puisque faire tourner complètement le robot équivaut à 360 degrés, vous pouvez ajouter et soustraire 360 degrés pour calculer la façon dont le robot devra tourner. 360-56 = 304. Ainsi, le robot devra tourner de 304 degrés vers la gauche pour terminer au même endroit qu'un virage de 56 degrés vers la droite.
Étape 6 : Relevez le défi des caméras de sécurité !

 Dans le Security Camera Challenge, le robot doit commencer par tourner à droite de 90 degrés. Le robot tournera alors vers la gauche de 180 degrés puis vers la droite de 180 degrés en « scannant » tout comme une caméra de sécurité. Le robot répétera ensuite sa rotation de 180 degrés vers la gauche et de 180 degrés vers la droite encore deux fois. Ainsi, le robot balayera trois fois au total 180 degrés.
Dans le Security Camera Challenge, le robot doit commencer par tourner à droite de 90 degrés. Le robot tournera alors vers la gauche de 180 degrés puis vers la droite de 180 degrés en « scannant » tout comme une caméra de sécurité. Le robot répétera ensuite sa rotation de 180 degrés vers la gauche et de 180 degrés vers la droite encore deux fois. Ainsi, le robot balayera trois fois au total 180 degrés.
Avant de programmer le robot, planifiez le chemin et les comportements du robot dans votre cahier d'ingénierie.
Après avoir terminé le défi des caméras de sécurité, vous pourrez combiner des mouvements avant et arrière avec des comportements de robot supplémentaires pour relever des défis encore plus avancés.
![]() Boîte à outils de l'enseignant
-
Solutions
Boîte à outils de l'enseignant
-
Solutions
- Consultez l'exemple de solution ci-dessous.
- Une rubrique de programmation pour évaluer les étudiants peut être trouvée ici (Google / .docx / .pdf).

Pour une solution plus avancée, un étudiant peut également être initié aux boucles en utilisant le bloc [Repeat] . Pour plus d'informations sur le bloc [Répéter] , consultez le Aide.

![]() Conseils aux enseignants
Conseils aux enseignants
Vérifiez que le robot a réussi le défi en observant sa position de départ et comptez pour vous assurer que le robot a effectué les actions correctes. Le robot doit tourner à droite de 90 degrés, puis répéter trois fois : un virage à gauche de 180 degrés et un virage à droite de 180 degrés.