
![]() Набор инструментов учителя
План занятия
Набор инструментов учителя
План занятия
-
Это исследование познакомит учащихся с основными правилами программирования поворота направо, налево и ожидания.
-
Использование конфигурации робота с трансмиссией позволяет учащимся запрограммировать Speedbot на поворот, просто выбрав блок [Поворот на] .
Спидбот готов к повороту!
Это исследование даст вам инструменты, которые помогут вам начать создавать интересные проекты для вашего Speedbot.
-
VEXcode V5 , который будет использоваться в этом исследовании:
-
Чтобы узнать дополнительную информацию о блоке, откройте Справку и выберите блок [Поворот на].

-
Убедитесь, что у вас есть необходимое оборудование, инженерный блокнот и VEXcode V5, загруженные и готовые.
![]() Советы учителям
Советы учителям
Если учащийся впервые использует VEXcode V5, он может обратиться к учебникам в любой момент во время изучения. Учебники расположены на панели инструментов.

| Количество | Необходимые материалы |
|---|---|
| 1 |
Спидбот Робот |
| 1 |
Заряженная батарея робота |
| 1 |
VEXкод V5 |
| 1 |
USB-кабель (при использовании компьютера) |
| 1 |
Инженерный блокнот |
![]() Советы учителям
Советы учителям
-
Смоделируйте каждый шаг проверки готовности Speedbot, чтобы учащиеся привыкли это делать.
Шаг 1: Подготовка к исследованию
Прежде чем приступить к занятию, готовы ли у вас все эти предметы? Проверьте каждое из следующих действий:
Шаг 2: Начните новый проект
Прежде чем приступить к проекту, выберите проект Speedbot (трансмиссия, 2 двигателя, без гироскопа) — шаблон. Шаблон проекта содержит конфигурацию двигателя Speedbot. Если шаблон не используется, ваш робот не сможет корректно запустить проект.

Выполните следующие шаги, чтобы открыть проект шаблона:
-
Откройте меню «Файл».
-
Выберите Открыть примеры.
-
Выберите и откройте проект шаблона Speedbot (трансмиссия, 2 двигателя, без гироскопа).
-
Поскольку мы будем использовать блок [Turn for], переименуйте свой проект в Turn.
-
Сохраните свой проект.
-
Убедитесь, что имя проекта Turn теперь находится в окне в центре панели инструментов.

![]() Инструменты учителя
проектов
Инструменты учителя
проектов

Обратите внимание, что когда они впервые открыли VEXcode V5, окно было помечено VEXcode Project и не было сохранено (обозначено на панели инструментов). VEXcode Project — это имя проекта по умолчанию при первом открытии VEXcode V5. Как только проект будет переименован в Turn и сохранен, на дисплее появится надпись Saved. Используя это окно на панели инструментов, можно легко проверить, что учащиеся используют правильный проект, и он сохранен. После первоначального сохранения проекта VEXcode V5 автоматически сохраняет все последующие изменения, о чем свидетельствует сообщение рядом с именем проекта.
Скажите учащимся, что теперь они готовы приступить к своему первому проекту. Объясните учащимся, что, выполнив несколько простых шагов, они смогут создать и запустить проект, который превратит Speedbot.
![]() Советы учителям
Советы учителям
-
Поскольку это начальное занятие по программированию, учитель должен смоделировать шаги, а затем попросить учащихся выполнить те же действия. Затем учитель должен следить за учениками, чтобы убедиться, что они правильно выполняют шаги.
-
Убедитесь, что учащиеся выбрали «Открыть Примеры в меню «Файл».
-
Убедитесь, что учащиеся выбрали шаблон проекта Speedbot (трансмиссия с 2 двигателями и без гироскопа) .
Вы можете указать учащимся, что на странице Примеры можно выбрать несколько вариантов. По мере того, как они создают и используют других роботов, у них будет возможность использовать разные шаблоны.
-
Вы можете попросить учащихся добавить к названию проекта свои инициалы или название своей группы. Это поможет дифференцировать проекты, если вы попросите учащихся представить их.
Шаг 3: Поверните направо.
-
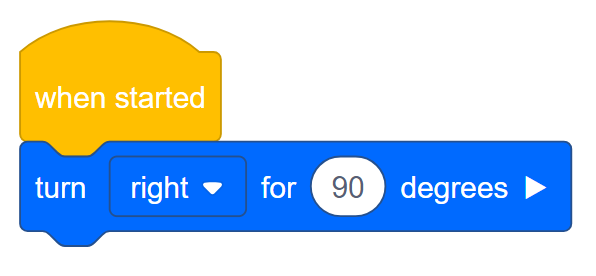
Добавьте блок [Поворот на] к блоку {When started} в области программирования.

-
Нажмите на значок Slot . Вы можете загрузить свой проект в один из четырех доступных слотов в Robot Brain. Нажмите на цифру 1.

-
Подключите робота к компьютеру или планшету. Значок «Мозг» на панели инструментов станет зеленым после успешного подключения.

-
Нажмите кнопку Download на панели инструментов, чтобы загрузить проект Turn в Robot Brain.
![]() Инструментарий учителя
Помощь с блоками.
Инструментарий учителя
Помощь с блоками.
-
Обратите внимание, что в области программирования по умолчанию уже имеется блок {When started}. Любой проект начинается с этого блока. При запуске проекта связанные блоки будут отслеживаться в той последовательности, в которой они расположены.
Продемонстрируйте нажатие на блок [Поворот на] и перетаскивание его в область программирования, соединяя его с блоком {When started}. Когда он прикрепится, вы услышите щелчок.
-
Если вы используете компьютер, учащийся должен подключить робот-мозг VEX V5 к компьютеру с помощью кабеля USB . Если вы используете планшет, робот-мозг VEX V5 должен быть подключен к планшету с помощью Smart Radio.
-
Если учащиеся используют компьютер, попросите их отключить USB-кабель от Robot Brain. Подключение робота к компьютеру во время выполнения проекта может привести к тому, что робот потянет за соединительный кабель.
![]() Инструментарий учителя
и обсудите
Инструментарий учителя
и обсудите
Это хороший момент, чтобы сделать паузу и дать ученику возможность подумать о запуске своего первого проекта. Будучи студентами:
-
Что делал Speedbot, когда вы запускали проект?
-
Повело ли оно себя так, как вы ожидали, исходя из проекта?
Прежде чем двигаться дальше, убедитесь, что все учащиеся выполнили этот шаг без каких-либо проблем.

-
Убедитесь, что ваш проект загружен в Speedbot's Brain, посмотрев на экран Robot Brain. Имя проекта должно быть указано в слоте 1.
![]() Набор инструментов для учителя
сначала
Набор инструментов для учителя
сначала
Смоделируйте выполнение проекта перед классом, прежде чем предложить его попробовать всем учащимся одновременно. Соберите учеников в одном месте и оставьте достаточно места для перемещения Speedbot, если он размещен на полу. Поскольку Speedbot будет продолжать выполнение проекта до тех пор, пока не будет нажата кнопка «Назад» на Robot Brain, учитель может выбрать кого-нибудь, кто поможет остановить проект Speedbot после его завершения.
Скажите учащимся, что теперь их очередь реализовать свой проект. Убедитесь, что у них есть свободный путь и что ни один спидбот не столкнется друг с другом.
-
Запустите проект на роботе Speedbot, убедившись, что проект выбран, а затем нажмите кнопку «Выполнить».
Шаг 4: Поверните налево

![]() Инструментарий учителя
Завершение шага 4.
Инструментарий учителя
Завершение шага 4.
-
Чтобы изменить блок [Поворот на] с вправо на влево, просто щелкните раскрывающееся меню и выберите влево.
-
Если учащиеся используют компьютер, напомните им, что перед запуском проекта нужно отсоединить USB-кабель от Robot Brain.
Поскольку мы не выбираем новый слот, новый проект будет загружен в слот 1 и заменит предыдущий проект.
-
Поскольку в VEXcode V5 есть автосохранение, нет необходимости сохранять проект еще раз.
Шаг 5: Подождите, затем поверните налево.
-
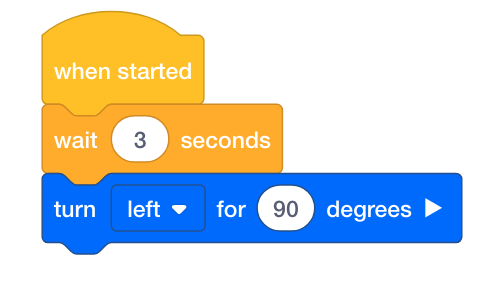
Добавьте блок [Ожидание] перед блоком [Поворот на] . Это заставит робота подождать, прежде чем повернуть налево.
-
Вставьте три секунды в блок [Подождите] . Это говорит роботу подождать три, прежде чем повернуть.
-
Скачать проект.
-
Запустите проект на роботе Speedbot, убедившись, что проект выбран, а затем нажмите кнопку «Выполнить».
![]() Набор инструментов учителя
Завершение шага 5.
Набор инструментов учителя
Завершение шага 5.
-
Блок [Wait] можно разместить в любом месте проекта. Для получения дополнительной информации по блоку [Подождите] откройте Help.
-
Использование блока [Wait] не приведет к завершению проекта.
-
Если учащиеся используют компьютер, напомните им, что перед запуском проекта нужно отсоединить USB-кабель от Robot Brain.
-
Поскольку в VEXcode V5 есть автосохранение, нет необходимости сохранять проект еще раз.
![]() Мотивировать обсуждение
Понимание блоков
Мотивировать обсуждение
Понимание блоков
В: Просмотр текущего положения робота на нуле градусов. Если робот повернул влево на 90 градусов, затем повернул направо на 120 градусов и закончил поворотом влево на 40 градусов, на каком уровне в настоящее время будет находиться робот после завершения поворота?
А: Робот будет находиться под углом 10 градусов. Повернув налево на 90 градусов, робот повернул направо на 120 градусов. Если рассматривать поворот налево как движение в положительном направлении, а поворот направо как вычитание или движение в отрицательном направлении — аналогично координатной плоскости xy, теперь робот будет находиться под углом -30 градусов. Так как 90-120=-30. От -30 градусов робот поворачивает влево на 40 градусов. Таким образом, -30 + 40 = 10. Робот заканчивается на 10 градусах.
Q: При просмотре текущего положения робота под углом 0 градусов поворот робота на 30 градусов вправо приведет к тому, что робот финиширует в том же месте, что и при старте с нуля градусов и повороте робота на 330 градусов влево. Если робот повернул направо на 56 градусов, и на сколько градусов влево ему придется повернуть, чтобы оказаться в том же месте, если предположить, что он начал с нуля градусов?
A: Поскольку полный поворот робота составляет 360 градусов, вы можете прибавлять и вычитать из 360 градусов, чтобы рассчитать, как роботу нужно будет повернуться. 360 – 56 = 304. Таким образом, роботу придется повернуть на 304 градуса влево, чтобы закончить в том же месте, что и поворот на 56 градусов вправо.
Шаг 6. Завершите испытание камеры наблюдения!

 В соревновании по камерам наблюдения робот должен начать с поворота вправо на 90 градусов. Затем робот повернется на 180 градусов влево, а затем на 180 градусов вправо, «сканируя», как камера видеонаблюдения. Затем робот повторит поворот на 180 градусов влево и на 180 градусов вправо еще два раза. Таким образом, робот просканирует 180 градусов всего три раза.
В соревновании по камерам наблюдения робот должен начать с поворота вправо на 90 градусов. Затем робот повернется на 180 градусов влево, а затем на 180 градусов вправо, «сканируя», как камера видеонаблюдения. Затем робот повторит поворот на 180 градусов влево и на 180 градусов вправо еще два раза. Таким образом, робот просканирует 180 градусов всего три раза.
Прежде чем программировать робота, спланируйте его путь и поведение в своей инженерной тетради.
Выполнив задание камеры наблюдения, вы сможете комбинировать движения вперед и назад с дополнительным поведением робота, чтобы решать еще более сложные задачи.
![]() Инструментарий учителя
Инструментарий учителя


![]() Советы учителям
Советы учителям
Подтвердите, что робот успешно выполнил задание, наблюдая за его исходным положением, и подсчитайте, чтобы убедиться, что робот выполнил правильные действия. Робот должен повернуть направо на 90 градусов, затем повторить три раза: поворот налево на 180 градусов и поворот направо на 180 градусов.