
![]() Mokytojo įrankių rinkinys
Veiklos
Mokytojo įrankių rinkinys
Veiklos
-
Šis tyrinėjimas supažindins studentus su pagrindiniais posūkio į dešinę, į kairę ir laukimo programavimo elgsena.
-
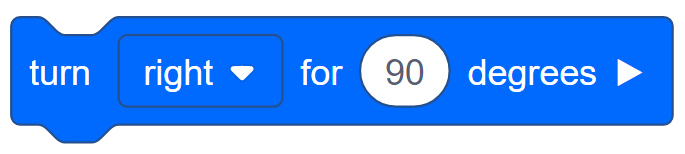
Naudodami pavaros roboto konfigūraciją, mokiniai gali užprogramuoti Speedbot sukimąsi tiesiog pasirinkdami [Turn for] bloką.
Speedbot pasiruošęs suktis!
Šis tyrinėjimas suteiks jums įrankių, kad galėtumėte pradėti kurti puikius projektus, kuriuos galėtumėte sekti savo Speedbot.
-
VEXcode V5 , kuris bus naudojamas šiame tyrime:
-
Norėdami sužinoti daugiau informacijos apie bloką, atidarykite Pagalba ir pasirinkite bloką [Turn for].

-
Įsitikinkite, kad turite reikiamą techninę įrangą, inžinerinį nešiojamąjį kompiuterį ir VEXcode V5 atsisiųstą ir paruoštą.
![]() Mokytojo patarimai
Mokytojo patarimai
Jei mokinys pirmą kartą naudoja VEXcode V5, bet kuriuo šio tyrinėjimo metu jis gali remtis vadovėliais. Mokymai yra įrankių juostoje.

| Kiekis | Reikalingos medžiagos |
|---|---|
| 1 |
„Speedbot“ robotas |
| 1 |
Įkrauta roboto baterija |
| 1 |
VEXkodas V5 |
| 1 |
USB kabelis (jei naudojate kompiuterį) |
| 1 |
Inžinerijos sąsiuvinis |
![]() Mokytojo patarimai
Mokytojo patarimai
-
Sumodeliuokite kiekvieną žingsnį, kad patikrintumėte, ar „Speedbot“ yra paruoštas, kad mokiniai įprastų tai daryti.
1 veiksmas: pasiruošimas tyrinėjimui
Ar prieš pradėdami veiklą turite pasiruošę kiekvieną iš šių dalykų? Patikrinkite kiekvieną iš šių dalykų:
-
Ar išmanieji kabeliai iki galo įkišti į visus variklius?
-
Ar smegenys įjungtos?
-
Ar akumuliatorius įkrautas?
2 veiksmas: pradėkite naują projektą
Prieš pradėdami projektą, pasirinkite „Speedbot“ (2 pavaros varikliai, be giroskopo) – šablono projektą. Šablono projekte yra „Speedbot“ variklio konfigūracija. Jei šablonas nenaudojamas, jūsų robotas netinkamai vykdys projektą.

Norėdami atidaryti šablono projektą, atlikite šiuos veiksmus:
-
Atidarykite meniu Failas.
-
Pasirinkite Atidarykite Pavyzdžiai.
-
Pasirinkite ir atidarykite „Speedbot“ („Drivetrain 2-motors, No Gyro“) šablono projektą.
-
Kadangi mes naudosime bloką [Turn for], pervardykite savo projektą Turn.
-
Išsaugokite savo projektą.
-
Patikrinkite, ar projekto pavadinimas Turn dabar yra lange įrankių juostos centre.

![]() Mokytojo įrankių rinkinys
Projektų
Mokytojo įrankių rinkinys
Projektų

Atkreipkite dėmesį, kad pirmą kartą atidarius VEXcode V5, langas buvo pažymėtas VEXcode Project ir jis nebuvo išsaugotas (nurodytas įrankių juostoje). VEXcode Project yra numatytasis projekto pavadinimas, kai pirmą kartą atidaromas VEXcode V5. Kai projektas bus pervadintas Turn ir išsaugotas, ekranas atnaujinamas į Išsaugotas. Naudojant šį langą įrankių juostoje, nesunku patikrinti, ar mokiniai naudoja tinkamą projektą ir jis išsaugotas. Kai projektas iš pradžių išsaugomas, VEXcode V5 automatiškai išsaugo visus vėlesnius pakeitimus, kaip nurodyta pranešime šalia projekto pavadinimo.
Pasakykite mokiniams, kad jie dabar yra pasirengę pradėti savo pirmąjį projektą. Paaiškinkite mokiniams, kad atlikę kelis paprastus veiksmus, jie galės sukurti ir vykdyti projektą, kuris pakeis Speedbot.
![]() Mokytojo patarimai
Mokytojo patarimai
-
Kadangi tai yra pradžia su programavimu, mokytojas turėtų modeliuoti žingsnius ir paprašyti mokinių atlikti tuos pačius veiksmus. Tada mokytojas turėtų stebėti mokinius, kad įsitikintų, jog jie teisingai atlieka veiksmus.
-
Įsitikinkite, kad mokiniai meniu Failas pasirinko Atidaryti Pavyzdžiai .
-
Įsitikinkite, kad mokiniai pasirinko Speedbot (Drivetrain 2-motors, No Gyro) šablono projektą.
Galite atkreipti mokiniams dėmesį, kad puslapyje pavyzdžiai yra keletas pasirinkimų. Kurdami ir naudodami kitus robotus, jie turės galimybę naudoti skirtingus šablonus.
-
Galite paprašyti mokinių prie projekto pavadinimo pridėti savo inicialus arba grupės pavadinimą. Tai padės atskirti projektus, jei paprašysite mokinių juos pateikti.
3 veiksmas: pasukite į dešinę
-
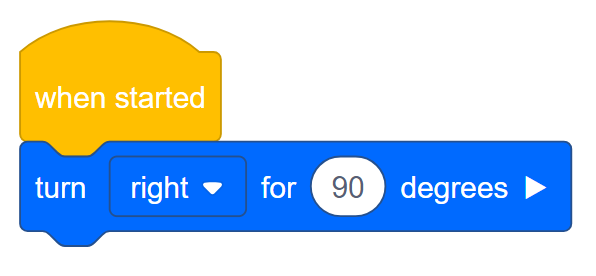
Pridėkite [Turn for] bloką prie {When started} bloko programavimo srityje.

-
Spustelėkite piktogramą Slot . Galite atsisiųsti savo projektą į vieną iš keturių galimų vietų Robot Brain. Spustelėkite skaičių 1.

-
Prijunkite robotą prie kompiuterio ar planšetinio kompiuterio. Sėkmingai užmezgus ryšį, įrankių juostoje esanti smegenų piktograma tampa žalia.

-
Spustelėkite mygtuką Atsisiųsti įrankių juostoje, kad atsisiųstumėte projektą „Turn to the Robot Brain“.
![]() Mokytojo įrankių rinkinys
-
Pagalba su blokais
Mokytojo įrankių rinkinys
-
Pagalba su blokais
-
Atkreipkite dėmesį, kad programavimo srityje pagal numatytuosius nustatymus jau yra {When started} blokas. Kiekvienas projektas prasidės šiuo bloku. Pradėjus projektą, prijungti blokai bus sekami tokia seka, kokia jie dedami.
Parodykite, kad spustelėjote bloką [Turn for] ir vilkite jį į programavimo sritį, prijungdami jį prie {When started} bloko. Pritvirtinus išgirsite spragtelėjimą.
-
Jei naudojatės kompiuteriu, mokinys VEX V5 Robot Brain turi prijungti prie kompiuterio naudojant USB laidą. Jei naudojate planšetinį kompiuterį, VEX V5 Robot Brain turi būti prijungtas prie planšetinio kompiuterio naudojant išmanųjį radiją.
-
Jei mokiniai naudojasi kompiuteriu, paprašykite jų dabar atjungti USB kabelį nuo Robot Brain. Jei vykdydamas projektą robotas prijungtas prie kompiuterio, jis gali traukti jungiamąjį laidą.
![]() Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Tai geras taškas pristabdyti ir paprašyti mokinio pagalvoti apie savo pirmojo projekto vykdymą. Kaip studentai:
-
Ką veikė Speedbot, kai vykdėte projektą?
-
Ar jis elgėsi taip, kaip tikėjotės, remiantis projektu?
Prieš tęsdami, skirkite šiek tiek laiko ir įsitikinkite, kad visi mokiniai atliko šį veiksmą be jokių problemų.

-
Patikrinkite, ar jūsų projektas atsisiųstas į „Speedbot's Brain“, žiūrėdami į „Robot Brain“ ekraną. Projekto pavadinimas turi būti nurodytas 1langelyje.
![]() Mokytojo įrankių rinkinys
modelis
Mokytojo įrankių rinkinys
modelis
Modeliuokite, kad projektas būtų vykdomas prieš klasę, kol visi mokiniai bando iš karto. Surinkite mokinius vienoje srityje ir palikite pakankamai vietos Speedbot judėti, jei jis pastatytas ant grindų. Kadangi „Speedbot“ tęs projektą, kol bus paspaustas „Robot Brain“ grįžimo mygtukas, mokytojas gali norėti pasirinkti ką nors, kas padėtų sustabdyti „Speedbot“ projektą jam pasibaigus.
Pasakykite mokiniams, kad dabar jų eilė vykdyti savo projektą. Įsitikinkite, kad jie turi aiškų kelią ir kad joks „Speedbot“ nesusidurs.
-
Vykdykite projektą naudodami „Speedbot“ robotą, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Vykdyti.
4 veiksmas: pasukite į kairę

-
Pakeiskite [Turn for], kad būtų rodoma kairė , o ne dešinė.
-
Atsisiųskite projektą.
-
Vykdykite projektą naudodami Speedbot robotą, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Vykdyti.
![]() Mokytojo įrankių rinkinys
veiksmo užbaigimas
Mokytojo įrankių rinkinys
veiksmo užbaigimas
-
Norėdami pakeisti bloką [Turn for] iš į dešinę į į kairę, tiesiog spustelėkite išskleidžiamąjį meniu ir pasirinkite kairėn.
-
Jei mokiniai naudojasi kompiuteriu, priminkite jiems, kad prieš vykdydami projektą atjunkite USB kabelį nuo Robot Brain.
Kadangi nesirenkame naujo lizdo, naujas projektas bus atsiųstas į 1 lizdą ir pakeis ankstesnį projektą.
-
Kadangi VEXcode V5 turi automatinį išsaugojimą, projekto iš naujo įrašyti nereikia.
5 veiksmas: Palaukite, tada pasukite į kairę
-
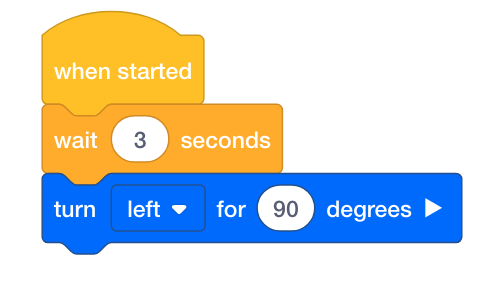
Pridėkite [Wait] bloką prieš [Turn for] bloką. Tai lieps robotui palaukti prieš pasukant į kairę.
-
Įdėkite tris sekundes į [Palauk] bloką. Tai liepia robotui palaukti tris prieš pasukdamas.
-
Atsisiųskite projektą.
-
Vykdykite projektą naudodami Speedbot robotą, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Vykdyti.
![]() Mokytojo įrankių rinkinys
veiksmo užbaigimas
Mokytojo įrankių rinkinys
veiksmo užbaigimas
-
[Palauk] bloką galima įdėti bet kurioje projekto vietoje. Norėdami gauti daugiau informacijos apie [Palauk] bloką, atidarykite Pagalbą.
-
Naudojant [Palauk] bloką projektas nebus baigtas.
-
Jei mokiniai naudojasi kompiuteriu, priminkite jiems, kad prieš vykdydami projektą atjunkite USB kabelį nuo Robot Brain.
-
Kadangi VEXcode V5 turi automatinį išsaugojimą, projekto iš naujo įrašyti nereikia.
![]() Motyvuokite diskusiją
-
Blokų supratimas
Motyvuokite diskusiją
-
Blokų supratimas
Klausimas: Dabartinės roboto padėties peržiūra nuliui laipsnių kampu. Jei robotas pasisuko į kairę 90 laipsnių, po to pasuko į dešinę 120 laipsnių ir baigė pasukdamas į kairę 40 laipsnių, kiek laipsnių šiuo metu būtų robotas, baigęs suktis?
A: Robotas bus 10 laipsnių kampu. Pasukus į kairę 90 laipsnių, robotas pasuko 120 laipsnių į dešinę. Žiūrint, kad posūkis į kairę juda teigiama kryptimi, o posūkis į dešinę – kaip atimimas arba judėjimas neigiama kryptimi – panašiai kaip xy koordinačių plokštuma, dabar robotas yra -30 laipsnių. Kadangi 90-120 = -30. Nuo -30 laipsnių robotas pasisuka į kairę 40 laipsnių kampu. Taigi -30 + 40 = 10. Robotas baigiasi 10 laipsnių.
Kl.: Žiūrint į dabartinę roboto padėtį nuliui laipsnių kampu, pasukus robotą 30 laipsnių į dešinę, robotas baigsis toje pačioje vietoje, kaip ir pradėdamas nuo nulio laipsnių ir pasukdamas robotą 330 laipsnių į kairę. Jei robotas pasisuko į dešinę 56 laipsniais ir kiek laipsnių į kairę robotas turės pasisukti, kad baigtųsi toje pačioje vietoje, darant prielaidą, kad jis prasideda nuo nulio laipsnių?
A: Kadangi visiškai apsukamas robotas yra 360 laipsnių, galite pridėti ir atimti iš 360 laipsnių, kad apskaičiuotumėte, kaip robotas turės apsisukti. 360–56 = 304. Taigi, robotas turės pasisukti 304 laipsniais į kairę, kad baigtųsi toje pačioje vietoje, kaip ir 56 laipsnių kampu į dešinę.
6 veiksmas: atlikite apsaugos kameros iššūkį!

 Apsaugos kameros iššūkyje robotas turi pradėti pasisukti į dešinę 90 laipsnių kampu. Tada robotas pasisuks į kairę 180 laipsnių, tada į dešinę 180 laipsnių „nuskaitydamas“ kaip apsaugos kamera. Tada robotas dar du kartus pasisuks 180 laipsnių į kairę ir 180 laipsnių į dešinę. Taigi robotas iš viso tris kartus nuskaitys 180 laipsnių kampu.
Apsaugos kameros iššūkyje robotas turi pradėti pasisukti į dešinę 90 laipsnių kampu. Tada robotas pasisuks į kairę 180 laipsnių, tada į dešinę 180 laipsnių „nuskaitydamas“ kaip apsaugos kamera. Tada robotas dar du kartus pasisuks 180 laipsnių į kairę ir 180 laipsnių į dešinę. Taigi robotas iš viso tris kartus nuskaitys 180 laipsnių kampu.
Prieš programuodami robotą, savo inžinerijos bloknote suplanuokite roboto kelią ir elgesį.
Įveikę apsaugos kameros iššūkį, galėsite derinti judesius pirmyn ir atgal su papildomais roboto elgsena, kad įveiktumėte dar sudėtingesnius iššūkius.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys


![]() Mokytojo patarimai
Mokytojo patarimai
Patikrinkite, ar robotas sėkmingai įveikė iššūkį, stebėdamas roboto pradinę padėtį, ir suskaičiuokite, kad įsitikintumėte, jog robotas atliko teisingus veiksmus. Robotas turi pasukti į dešinę 90 laipsnių kampu, tada pakartoti tris kartus: pasukti į kairę 180 laipsnių ir į dešinę 180 laipsnių kampu.