
![]() Casella degli strumenti per l'insegnante
-
Schema attività
Casella degli strumenti per l'insegnante
-
Schema attività
-
Questa esplorazione introdurrà gli studenti ai comportamenti base di programmazione della svolta a destra, a sinistra e dell'attesa.
-
Utilizzando la configurazione del robot di trasmissione, gli studenti possono programmare lo Speedbot per girare semplicemente selezionando il blocco [Gira per] .
Speedbot è pronto a girare!
Questa esplorazione ti fornirà gli strumenti per poter iniziare a creare alcuni progetti interessanti che il tuo Speedbot potrà seguire.
-
VEXcode V5 che verrà utilizzato in questa esplorazione:
-
Per scoprire ulteriori informazioni sul blocco, apri la Guida e quindi seleziona il blocco [Gira per].

-
Assicurati di avere l'hardware richiesto, il tuo notebook di ingegneria e VEXcode V5 scaricato e pronto.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Se è la prima volta che lo studente utilizza VEXcode V5, può fare riferimento ai tutorial in qualsiasi momento durante questa esplorazione. I Tutorial si trovano nella barra degli strumenti.

| Quantità | Materiale necessario |
|---|---|
| 1 |
Robot robot veloce |
| 1 |
Batteria del robot carica |
| 1 |
Codice VEX V5 |
| 1 |
Cavo USB (se si utilizza un computer) |
| 1 |
Quaderno di ingegneria |
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
Modella ciascuno dei passaggi per verificare che lo Speedbot sia pronto in modo che gli studenti prendano l'abitudine di farlo.
Passaggio 1: preparazione per l'esplorazione
Prima di iniziare l'attività, hai ciascuno di questi elementi pronti? Controlla ciascuno dei seguenti elementi:
-
I cavi intelligenti sono completamente inseriti in tutti i motori?
-
Il cervello è acceso?
-
La batteria è carica?
Passaggio 2: avvia un nuovo progetto
Prima di iniziare il progetto, seleziona il progetto Speedbot (Drivetrain 2-motors, No Gyro) - Template. Il progetto modello contiene la configurazione del motore dello Speedbot. Se il modello non viene utilizzato, il tuo robot non eseguirà correttamente il progetto.

Completa i seguenti passaggi per aprire il progetto modello:
-
Apri il menu File.
-
Seleziona Apri esempi.
-
Seleziona e apri il modello Speedbot (Drivetrain 2-motors, No Gyro) progetto.
-
Poiché utilizzeremo il blocco [Turn for], rinomina il tuo progetto Turn.
-
Salva il tuo progetto.
-
Controlla che il nome del progetto Turn ora si trova nella finestra al centro della barra degli strumenti.

![]() Casella degli strumenti dell'insegnante
-
Salvataggio di progetti
Casella degli strumenti dell'insegnante
-
Salvataggio di progetti

Sottolinea che quando hanno aperto VEXcode V5 per la prima volta, la finestra era etichettata Progetto VEXcode e non è stato salvato (indicato sulla barra degli strumenti). VEXcode Project è il nome del progetto predefinito quando VEXcode V5 viene aperto per la prima volta. Una volta rinominato il progetto Trasforma e salvato, la visualizzazione viene aggiornata a Salvato. Utilizzando questa finestra nella barra degli strumenti, è facile verificare che gli studenti stiano utilizzando il progetto corretto e che questo sia salvato. Una volta salvato inizialmente un progetto, VEXcode V5 salva automaticamente tutte le modifiche successive, come indicato dal messaggio accanto al nome del progetto.
Spiega agli studenti che ora sono pronti per iniziare il loro primo progetto. Spiega agli studenti che seguendo alcuni semplici passaggi saranno in grado di creare ed eseguire un progetto che trasformerà lo Speedbot.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
Poiché si tratta di un'attività iniziale con la programmazione, l'insegnante dovrebbe modellare i passaggi e quindi chiedere agli studenti di completare le stesse azioni. L'insegnante dovrebbe quindi monitorare gli studenti per assicurarsi che stiano seguendo i passaggi correttamente.
-
Assicurati che gli studenti abbiano selezionato Apri Esempi dal menu File.
-
Assicurati che gli studenti abbiano selezionato il modello Speedbot (Drivetrain 2-motors, No Gyro) progetto.
Puoi far notare agli studenti che ci sono diverse selezioni tra cui scegliere Esempi pagina. Man mano che costruiscono e utilizzano altri robot, avranno la possibilità di utilizzare modelli diversi.
-
Puoi chiedere agli studenti di aggiungere le loro iniziali o il nome del loro gruppo al nome del progetto. Ciò aiuterà a differenziare i progetti se chiedi agli studenti di presentarli.
Passaggio 3: gira a destra
-
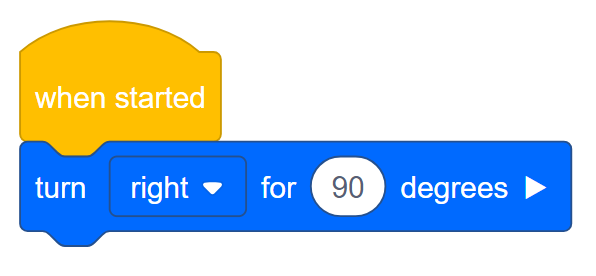
Aggiungi il blocco [Turn for] al blocco {When started} nell'area di programmazione.

-
Fai clic sullo slot icona. Puoi scaricare il tuo progetto in uno dei quattro slot disponibili nel cervello del robot. Fai clic sul numero 1.

-
Collega il robot al tuo computer o tablet. L'icona Cervello nella barra degli strumenti diventa verde una volta stabilita una connessione riuscita.

-
Fai clic su Scarica pulsante sulla barra degli strumenti per scaricare il progetto Turn nel Robot Brain.
![]() Casella degli strumenti per insegnanti
-
Guida con i blocchi
Casella degli strumenti per insegnanti
-
Guida con i blocchi
-
Tieni presente che nell'area di programmazione è già presente un blocco {When started} per impostazione predefinita. Ogni progetto inizierà con questo blocco. All'avvio del progetto i blocchi collegati verranno seguiti nell'ordine in cui sono posizionati.
Dimostra cliccando sul blocco [Turn for] e trascinandolo nell'area di programmazione, collegandolo al blocco {When started} . Si sentirà un clic quando viene collegato.
-
Se utilizzi un computer, lo studente deve avere VEX V5 Robot Brain collegato al computer tramite un cavo USB. Se utilizzi un tablet, il cervello robot VEX V5 deve essere collegato al tablet utilizzando la Smart Radio.
-
Se gli studenti utilizzano un computer, chiedi loro ora di scollegare il cavo USB dal cervello del robot. Se il robot è collegato a un computer durante l'esecuzione di un progetto, il robot potrebbe tirare il cavo di connessione.
![]() Casella degli strumenti per l'insegnante
-
Interrompi e discuti
Casella degli strumenti per l'insegnante
-
Interrompi e discuti
Questo è un buon punto per fare una pausa e far riflettere lo studente sulla gestione del suo primo progetto. Come studenti:
-
Cosa ha fatto Speedbot quando hai eseguito il progetto?
-
Si è comportato come ti aspetteresti, in base al progetto?
Prenditi un momento per assicurarti che tutti gli studenti abbiano completato questo passaggio senza problemi prima di proseguire.

-
Assicurati che il tuo progetto sia stato scaricato nel cervello dello Speedbot guardando lo schermo del cervello del robot. Il nome del progetto deve essere elencato in slot 1.
![]() Casella degli strumenti per insegnanti
-
Primo modello
Casella degli strumenti per insegnanti
-
Primo modello
Modella l'esecuzione del progetto davanti alla classe prima di far provare a tutti gli studenti contemporaneamente. Riunisci gli studenti in un'area e lascia spazio sufficiente affinché lo Speedbot possa muoversi se è posizionato sul pavimento. Poiché lo Speedbot continuerà a eseguire il progetto finché non verrà premuto il pulsante Indietro sul cervello del robot, l'insegnante potrebbe voler scegliere qualcuno che lo assista nell'interruzione del progetto dello Speedbot una volta terminato.
Spiega agli studenti che ora è il loro turno di portare avanti il loro progetto. Assicurati che abbiano un percorso libero e che nessuno Speedbot si incontri.
-
Esegui il progetto sul robot Speedbot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui.
Passaggio 4: girare a sinistra

![]() Strumenti dell'insegnante
-
Completamento del passaggio 4
Strumenti dell'insegnante
-
Completamento del passaggio 4
-
Per modificare il blocco [Gira per] dadestra a sinistra, fai semplicemente clic sul menu a discesa e seleziona sinistra.
-
Se gli studenti utilizzano un computer, ricorda loro di scollegare il cavo USB da Robot Brain prima di eseguire il progetto.
Poiché non stiamo selezionando un nuovo slot, il nuovo progetto verrà scaricato nello slot 1 e sostituirà il progetto precedente.
-
Poiché VEXcode V5 dispone del salvataggio automatico, non è necessario salvare nuovamente il progetto.
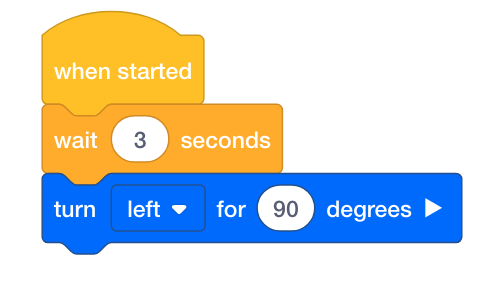
Passaggio 5: attendi, quindi gira a sinistra
-
Aggiungi un blocco [Aspetta] prima del blocco [Gira per] . Questo dirà al robot di attendere prima di girare a sinistra.
-
Inserisci tre secondi nel blocco [Wait] . Questo dice al robot di attendere tre prima di girare.
-
Scarica il progetto.
-
Esegui il progetto sul robot Speedbot assicurandoti che progetto è selezionato e quindi premere il pulsante Esegui.
![]() Strumenti dell'insegnante
-
Completamento del passaggio 5
Strumenti dell'insegnante
-
Completamento del passaggio 5
-
Un blocco [Wait] può essere posizionato ovunque nel progetto. Per ulteriori informazioni sul blocco [Wait] , apri il blocco Aiuto.
-
L'utilizzo di un blocco [Wait] non terminerà il progetto.
-
Se gli studenti utilizzano un computer, ricorda loro di scollegare il cavo USB da Robot Brain prima di eseguire il progetto.
-
Poiché VEXcode V5 dispone del salvataggio automatico, non è necessario salvare nuovamente il progetto.
![]() Motivare la discussione
-
Comprendere i blocchi
Motivare la discussione
-
Comprendere i blocchi
D: Visualizzazione della posizione corrente del robot a zero gradi, Se il robot girasse a sinistra di 90 gradi, poi a destra di 120 gradi e finisse girando a sinistra di 40 gradi, a quanti gradi si troverebbe attualmente il robot dopo aver finito di girare?
A: Il robot sarà a 10 gradi. Dopo aver girato a sinistra di 90 gradi, il robot ha girato a destra di 120 gradi. Considerando la svolta a sinistra come un movimento in una direzione positiva e la svolta a destra come una sottrazione o un movimento in una direzione negativa - simile a un piano di coordinate xy, questo ora posiziona il robot a -30 gradi. Poiché 90-120 = -30. Da -30 gradi, il robot gira a sinistra di 40 gradi. Quindi, -30 + 40 = 10. Il robot termina a 10 gradi.
D: Visualizzazione della posizione corrente del robot a zero gradi, ruotando il robot di 30 gradi a destra, il robot finirà nello stesso punto in cui si partiva da zero gradi e si girava il robot di 330 gradi a sinistra. Se il robot girasse a destra di 56 gradi e poi, di quanti gradi a sinistra dovrà girare il robot per finire nello stesso punto, supponendo che inizi da zero gradi?
A: Poiché la rotazione completa del robot è di 360 gradi, puoi aggiungere e sottrarre 360 gradi per calcolare in che modo il robot dovrà girare. 360 - 56 = 304. Pertanto, il robot dovrà girare di 304 gradi a sinistra per finire nello stesso punto in cui ha girato di 56 gradi a destra.
Passaggio 6: completa la sfida della telecamera di sicurezza!

 Nella Security Camera Challenge, il robot deve iniziare girando a destra di 90 gradi. Il robot girerà quindi a sinistra di 180 gradi e poi a destra di 180 gradi “scansionando” proprio come una telecamera di sicurezza. Il robot ripeterà quindi la rotazione di 180 gradi a sinistra e di 180 gradi a destra altre due volte. Pertanto, il robot effettuerà la scansione di 180 gradi tre volte in totale.
Nella Security Camera Challenge, il robot deve iniziare girando a destra di 90 gradi. Il robot girerà quindi a sinistra di 180 gradi e poi a destra di 180 gradi “scansionando” proprio come una telecamera di sicurezza. Il robot ripeterà quindi la rotazione di 180 gradi a sinistra e di 180 gradi a destra altre due volte. Pertanto, il robot effettuerà la scansione di 180 gradi tre volte in totale.
Prima di programmare il robot, pianifica il percorso e i comportamenti del robot nel tuo taccuino di ingegneria.
Dopo aver completato la sfida delle telecamere di sicurezza, potrai combinare i movimenti in avanti e all'indietro con comportamenti aggiuntivi del robot per completare sfide ancora più avanzate.
![]() Strumenti per insegnanti
-
Soluzioni
Strumenti per insegnanti
-
Soluzioni
- Visualizza la soluzione campione di seguito.
- Una rubrica di programmazione per valutare gli studenti può essere trovata qui (Google / .docx / .pdf).

Per una soluzione più avanzata, uno studente può anche essere introdotto ai loop utilizzando il blocco [Repeat] . Per ulteriori informazioni sul blocco [Repeat] , visualizza il blocco Aiuto.

![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
Verifica che il robot abbia completato con successo la sfida osservando la sua posizione iniziale e conta per assicurarti che il robot abbia eseguito le azioni corrette. Il robot dovrebbe girare a destra di 90 gradi, quindi ripetere tre volte: una svolta a sinistra di 180 gradi e una svolta a destra di 180 gradi.