
![]() กล่องเครื่องมือของครู
-
โครงร่างกิจกรรม
กล่องเครื่องมือของครู
-
โครงร่างกิจกรรม
-
การสำรวจนี้จะแนะนำให้นักเรียนรู้จักพฤติกรรมการเขียนโปรแกรมการเลี้ยวขวา ซ้าย และการรอขั้นพื้นฐาน
-
การใช้การกำหนดค่าหุ่นยนต์ระบบขับเคลื่อนทำให้นักเรียนสามารถตั้งโปรแกรมให้ Speedbot เลี้ยวได้โดยเลือกบล็อก [เลี้ยวสำหรับ]
Speedbot พร้อมเปิดแล้ว!
การสำรวจนี้จะให้เครื่องมือแก่คุณในการเริ่มสร้างโปรเจ็กต์เจ๋งๆ ให้ Speedbot ของคุณทำตาม
-
VEXcode V5 ที่จะใช้ในการสำรวจนี้:

-
ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น ดาวน์โหลดโน้ตบุ๊กวิศวกรรม และ VEXcode V5 และพร้อมใช้งานแล้ว
![]() เคล็ดลับของครู
เคล็ดลับของครู
หากนี่เป็นครั้งแรกของนักเรียนที่ใช้ VEXcode V5 พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาระหว่างการสำรวจนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ

| ปริมาณ | วัสดุที่จำเป็น |
|---|---|
| 1 |
หุ่นยนต์สปีดบอท |
| 1 |
แบตเตอรี่หุ่นยนต์ที่ชาร์จแล้ว |
| 1 |
VEXโค้ด V5 |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรมศาสตร์ |
![]() เคล็ดลับของครู
เคล็ดลับของครู
-
สร้างแบบจำลองแต่ละขั้นตอนในการตรวจสอบว่า Speedbot พร้อมใช้งานหรือไม่ เพื่อให้นักเรียนคุ้นเคยกับการทำเช่นนั้น
ขั้นตอนที่ 1: การเตรียมการสำหรับการสำรวจ
ก่อนเริ่มกิจกรรม คุณได้เตรียมสิ่งเหล่านี้ให้พร้อมแล้วหรือยัง? ตรวจสอบแต่ละรายการต่อไปนี้:
-
สายเคเบิลอัจฉริยะ เสียบไว้เต็ม เข้าไปในมอเตอร์ทั้งหมดหรือไม่?
-
สมอง เปิดอยู่หรือไม่
-
แบตเตอรี่ ชาร์จแล้วหรือไม่
ขั้นตอนที่ 2: เริ่มโครงการใหม่
ก่อนที่คุณจะเริ่มโปรเจ็กต์ ให้เลือกโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) โปรเจ็กต์เทมเพลตประกอบด้วยการกำหนดค่ามอเตอร์ของ Speedbot หากไม่ได้ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถดำเนินโครงการได้อย่างถูกต้อง

ทำตามขั้นตอนต่อไปนี้เพื่อเปิดโครงการเทมเพลต:
-
เปิดเมนูไฟล์
-
เลือก เปิดตัวอย่าง
-
เลือกและเปิดเทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) โครงการ
-
เนื่องจากเราจะใช้บล็อก [Turn for] ให้เปลี่ยนชื่อโปรเจ็กต์ของคุณ Turn
-
บันทึก โครงการของคุณ
-
ตรวจสอบเพื่อให้แน่ใจว่าชื่อโปรเจ็กต์เลี้ยว อยู่ในหน้าต่างตรงกลางของแถบเครื่องมือแล้ว

![]() กล่องเครื่องมือของครู
-
การบันทึกโปรเจ็กต์
กล่องเครื่องมือของครู
-
การบันทึกโปรเจ็กต์

ชี้ให้เห็นว่าเมื่อพวกเขาเปิด VEXcode V5 เป็นครั้งแรก หน้าต่างจะมีป้ายกำกับว่า VEXcode Project และไม่ได้รับการบันทึก (ระบุไว้บนแถบเครื่องมือ) โครงการ VEXcode เป็นชื่อโครงการเริ่มต้นเมื่อเปิด VEXcode V5 ครั้งแรก เมื่อเปลี่ยนชื่อโปรเจ็กต์เป็น Turn และบันทึกแล้ว จอแสดงผลจะอัปเดตเป็น Saved การใช้หน้าต่างนี้ในแถบเครื่องมือทำให้ง่ายต่อการตรวจสอบว่านักเรียนใช้โปรเจ็กต์ที่ถูกต้องและได้รับการบันทึกไว้แล้ว เมื่อโปรเจ็กต์ได้รับการบันทึกในขั้นต้น VEXcode V5 จะบันทึกการเปลี่ยนแปลงใดๆ ที่ตามมาโดยอัตโนมัติ ตามที่ระบุไว้ในข้อความถัดจากชื่อโปรเจ็กต์
บอกนักเรียนว่าพวกเขาพร้อมที่จะเริ่มโครงงานแรกแล้ว อธิบายให้นักเรียนฟังว่าเพียงทำตามขั้นตอนง่ายๆ ไม่กี่ขั้นตอน นักเรียนจะสามารถสร้างและดำเนินโครงการที่จะเปลี่ยน Speedbot ได้
![]() เคล็ดลับของครู
เคล็ดลับของครู
-
เนื่องจากนี่เป็นกิจกรรมเริ่มต้นของการเขียนโปรแกรม ครูควรจำลองขั้นตอนต่างๆ แล้วขอให้นักเรียนทำแบบเดียวกันให้เสร็จสิ้น จากนั้นครูควรติดตามนักเรียนเพื่อให้แน่ใจว่าพวกเขาทำตามขั้นตอนอย่างถูกต้อง
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือก Open ตัวอย่าง จากเมนูไฟล์
-
ตรวจสอบให้แน่ใจว่าผู้เรียนได้เลือกเทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) โครงการ.
คุณสามารถชี้ให้นักเรียนเห็นว่ามีตัวเลือกมากมายให้เลือกใน ตัวอย่าง หน้า ขณะที่พวกเขาสร้างและใช้หุ่นยนต์ตัวอื่น พวกเขาจะมีโอกาสใช้เทมเพลตที่แตกต่างกัน
-
คุณสามารถขอให้นักเรียนเพิ่มชื่อย่อหรือชื่อกลุ่มลงในชื่อโปรเจ็กต์ได้ ซึ่งจะช่วยแยกแยะโปรเจ็กต์ต่างๆ หากคุณขอให้นักเรียนส่ง
ขั้นตอนที่ 3: เลี้ยวขวา
-
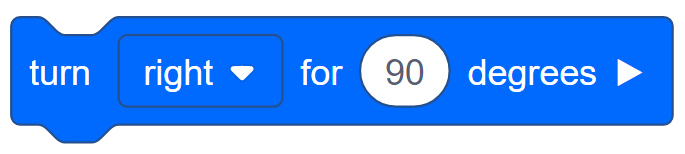
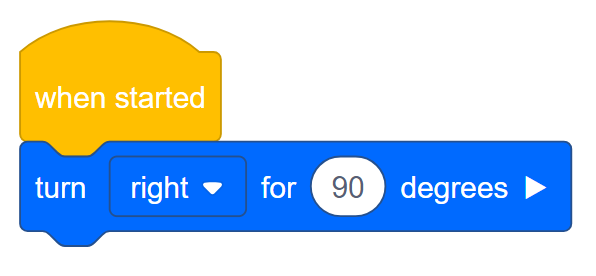
เพิ่มบล็อก [Turn for] ให้กับบล็อก {When started} ในพื้นที่การเขียนโปรแกรม

-
คลิกที่ สล็อต ไอคอน คุณสามารถดาวน์โหลดโปรเจ็กต์ของคุณลงในหนึ่งในสี่ช่อง ที่มีอยู่ ในสมองหุ่นยนต์ คลิกที่หมายเลข 1

-
เชื่อมต่อหุ่นยนต์เข้ากับคอมพิวเตอร์หรือแท็บเล็ตของคุณ ไอคอน Brain ในแถบเครื่องมือจะเปลี่ยนเป็นสีเขียวเมื่อทำการเชื่อมต่อสำเร็จ

-
คลิก ดาวน์โหลด บนแถบเครื่องมือเพื่อดาวน์โหลดโครงการ Turn ไปยัง Robot Brain
![]() กล่องเครื่องมือของครู
-
ความช่วยเหลือเกี่ยวกับการบล็อก
กล่องเครื่องมือของครู
-
ความช่วยเหลือเกี่ยวกับการบล็อก
-
ชี้ให้เห็นว่าในพื้นที่การเขียนโปรแกรม มีบล็อก {When started} อยู่แล้วตามค่าเริ่มต้น ทุกโครงการจะเริ่มต้นด้วยบล็อกนี้ เมื่อโครงการเริ่มต้นขึ้น บล็อกที่เชื่อมต่อจะถูกปฏิบัติตามตามลำดับที่วางไว้
สาธิตการคลิกบล็อก [Turn for] แล้วลากไปยังพื้นที่การเขียนโปรแกรม โดยเชื่อมต่อกับบล็อก {When started} คุณจะได้ยินเสียงคลิกเมื่อมันแนบ
-
หากคุณกำลังใช้คอมพิวเตอร์ นักเรียนควรมี VEX V5 Robot Brain เชื่อมต่อกับคอมพิวเตอร์โดยใช้สาย USB หากคุณใช้แท็บเล็ต VEX V5 Robot Brain ควรเชื่อมต่อกับแท็บเล็ตโดยใช้ Smart Radio
-
หากนักเรียนใช้คอมพิวเตอร์ ขอให้พวกเขาถอดสาย USB ออกจาก Robot Brain ตอนนี้ การมีหุ่นยนต์เชื่อมต่อกับคอมพิวเตอร์ในขณะที่ดำเนินโครงการอาจทำให้หุ่นยนต์ดึงสายเชื่อมต่อ
![]() กล่องเครื่องมือของครู
-
หยุดและอภิปราย
กล่องเครื่องมือของครู
-
หยุดและอภิปราย
นี่เป็นจุดดีที่จะหยุดชั่วคราวและให้นักเรียนไตร่ตรองถึงการดำเนินโครงการแรกของตน ในฐานะนักเรียน:
-
Speedbot ทำอะไรเมื่อคุณดำเนินโครงการ?
-
มันทำงานตามที่คุณคาดหวังตามโครงการหรือไม่?
ใช้เวลาสักครู่เพื่อให้แน่ใจว่านักเรียนทุกคนได้ทำตามขั้นตอนนี้โดยไม่มีปัญหาใดๆ ก่อนที่จะดำเนินการต่อ

-
ตรวจสอบเพื่อให้แน่ใจว่าโปรเจ็กต์ของคุณดาวน์โหลดไปยัง Speedbot's Brain แล้วโดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ควรแสดงอยู่ใน slot 1
![]() กล่องเครื่องมือของครู
-
รุ่นแรก
กล่องเครื่องมือของครู
-
รุ่นแรก
แบบจำลองดำเนินโครงงานหน้าชั้นเรียนก่อนที่จะให้นักเรียนทุกคนลองทำพร้อมกัน รวบรวมนักเรียนไว้ในบริเวณเดียวและปล่อยให้มีที่เพียงพอให้สปีดบอทเคลื่อนที่ได้หากวางอยู่บนพื้น เนื่องจาก Speedbot จะดำเนินการโปรเจ็กต์ต่อไปจนกว่าจะกดปุ่มย้อนกลับบน Robot Brain ครูอาจต้องการเลือกใครสักคนเพื่อช่วยหยุดโปรเจ็กต์ของ Speedbot เมื่อเสร็จสิ้น
บอกนักเรียนว่าตอนนี้ถึงคราวที่พวกเขาต้องทำโครงงานแล้ว ตรวจสอบให้แน่ใจว่าพวกเขามีเส้นทางที่ชัดเจน และไม่มีสปีดบอทมาชนกัน

![]() กล่องเครื่องมือของครู
-
เสร็จสิ้นขั้นตอนที่ 4
กล่องเครื่องมือของครู
-
เสร็จสิ้นขั้นตอนที่ 4
-
หากต้องการเปลี่ยนบล็อก [เลี้ยวสำหรับ] จาก ขวา เป็น ซ้าย เพียงคลิกที่เมนูแบบเลื่อนลงและเลือก ซ้าย
-
หากนักเรียนใช้คอมพิวเตอร์ เตือนให้ถอดสาย USB ออกจาก Robot Brain ก่อนดำเนินโครงการ
เนื่องจากเราไม่ได้เลือกสล็อตใหม่ โปรเจ็กต์ใหม่จะดาวน์โหลดไปที่สล็อต 1 และแทนที่โปรเจ็กต์ก่อนหน้า
-
เนื่องจาก VEXcode V5 มีการบันทึกอัตโนมัติ จึงไม่จำเป็นต้องบันทึกโปรเจ็กต์อีกครั้ง
![]() กล่องเครื่องมือของครู
-
เสร็จสิ้นขั้นตอนที่ 5
กล่องเครื่องมือของครู
-
เสร็จสิ้นขั้นตอนที่ 5
-
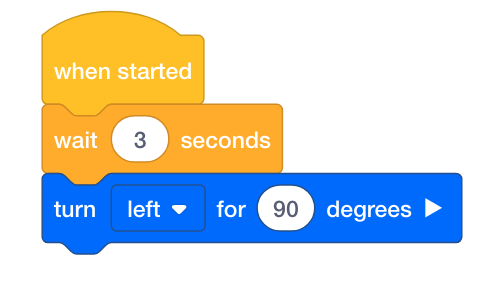
คุณสามารถวางบล็อก [Wait] ไว้ที่ใดก็ได้ในโปรเจ็กต์ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับบล็อก [รอ] ให้เปิดบล็อก ช่วยเหลือ
-
การใช้บล็อก [รอ] จะไม่ทำให้โปรเจ็กต์สิ้นสุดลง
-
หากนักเรียนใช้คอมพิวเตอร์ เตือนให้ถอดสาย USB ออกจาก Robot Brain ก่อนดำเนินโครงการ
-
เนื่องจาก VEXcode V5 มีการบันทึกอัตโนมัติ จึงไม่จำเป็นต้องบันทึกโปรเจ็กต์อีกครั้ง
![]() กระตุ้นการสนทนา
-
ทำความเข้าใจกับบล็อก
กระตุ้นการสนทนา
-
ทำความเข้าใจกับบล็อก
Q: การดูตำแหน่งปัจจุบันของหุ่นยนต์ที่ศูนย์องศา ถ้าหุ่นยนต์เลี้ยวซ้าย 90 องศา แล้วเลี้ยวขวา 120 องศา แล้วเลี้ยวซ้าย 40 องศา หุ่นยนต์จะอยู่ที่กี่องศาหลังจากหมุนเสร็จแล้ว?
A: หุ่นยนต์จะอยู่ที่ 10 องศา หลังจากเลี้ยวซ้าย 90 องศา หุ่นยนต์ก็เลี้ยวขวา 120 องศา การมองการเลี้ยวซ้ายเป็นการเคลื่อนไปในทิศทางบวก และการเลี้ยวขวาขณะกำลังลบหรือเคลื่อนที่ไปในทิศทางลบ - คล้ายกับระนาบพิกัด x-y ตอนนี้ทำให้หุ่นยนต์อยู่ที่ -30 องศา ตั้งแต่ 90-120 = -30 ตั้งแต่ -30 องศา หุ่นยนต์จะเลี้ยวซ้าย 40 องศา ดังนั้น -30 + 40 = 10 หุ่นยนต์สิ้นสุดที่ 10 องศา
Q: การดูตำแหน่งปัจจุบันของหุ่นยนต์ที่ศูนย์องศา การหมุนหุ่นยนต์ไปทางขวา 30 องศา จะทำให้หุ่นยนต์จบที่จุดเดิมโดยเริ่มจากศูนย์องศา และหมุนหุ่นยนต์ไปทางซ้าย 330 องศา ถ้าหุ่นยนต์หมุนไปทางขวา 56 องศา และหุ่นยนต์จะต้องหมุนไปทางซ้ายกี่องศาเพื่อสิ้นสุดที่จุดเดิมโดยสมมุติว่าเริ่มจากศูนย์องศา?
A: เนื่องจากการหมุนหุ่นยนต์จนสุดคือ 360 องศา คุณจึงสามารถบวกและลบจาก 360 องศาเพื่อคำนวณว่าหุ่นยนต์จะต้องหมุนอย่างไร 360 - 56 = 304. ดังนั้นหุ่นยนต์จะต้องหมุนไปทางซ้าย 304 องศาเพื่อสิ้นสุดที่จุดเดียวกับหมุนไปทางขวา 56 องศา
ขั้นตอนที่ 6: ทำภารกิจท้าทายกล้องรักษาความปลอดภัยให้สำเร็จ!

 ในการแข่งขัน Security Camera Challenge หุ่นยนต์จะต้องเริ่มต้นด้วยการหมุนไปทางขวา 90 องศา จากนั้นหุ่นยนต์จะหมุนไปทางซ้าย 180 องศา จากนั้นหมุนไปทางขวา 180 องศา “สแกน” เช่นเดียวกับกล้องวงจรปิด จากนั้นหุ่นยนต์จะหมุน 180 องศาไปทางซ้ายและ 180 องศาไปทางขวาอีกสองครั้ง ดังนั้นหุ่นยนต์จะสแกนทั้งหมด 180 องศาสามครั้ง
ในการแข่งขัน Security Camera Challenge หุ่นยนต์จะต้องเริ่มต้นด้วยการหมุนไปทางขวา 90 องศา จากนั้นหุ่นยนต์จะหมุนไปทางซ้าย 180 องศา จากนั้นหมุนไปทางขวา 180 องศา “สแกน” เช่นเดียวกับกล้องวงจรปิด จากนั้นหุ่นยนต์จะหมุน 180 องศาไปทางซ้ายและ 180 องศาไปทางขวาอีกสองครั้ง ดังนั้นหุ่นยนต์จะสแกนทั้งหมด 180 องศาสามครั้ง
ก่อนที่จะตั้งโปรแกรมหุ่นยนต์ ให้วางแผนเส้นทางและพฤติกรรมของหุ่นยนต์ในสมุดบันทึกทางวิศวกรรมของคุณ
หลังจากเสร็จสิ้นการท้าทายกล้องรักษาความปลอดภัย คุณจะสามารถรวมการเคลื่อนไหวไปข้างหน้าและข้างหลังเข้ากับพฤติกรรมของหุ่นยนต์เพิ่มเติมเพื่อทำการท้าทายขั้นสูงยิ่งขึ้นไปอีก


![]() เคล็ดลับของครู
เคล็ดลับของครู
ตรวจสอบว่าหุ่นยนต์สำเร็จการท้าทายโดยดูตำแหน่งเริ่มต้นของหุ่นยนต์ และนับเพื่อให้แน่ใจว่าหุ่นยนต์ได้ดำเนินการที่ถูกต้อง หุ่นยนต์ควรเลี้ยวขวา 90 องศา จากนั้นทำซ้ำสามครั้ง: เลี้ยวซ้าย 180 องศา และเลี้ยวขวา 180 องศา