
![]() Opettajan työkalupakki
-
Tehtävän hahmotelma
Opettajan työkalupakki
-
Tehtävän hahmotelma
-
Tämä tutkimus esittelee oppilaat oikealle, vasemmalle kääntymisen ja odottamisen ohjelmoinnin peruskäyttäytymiseen.
-
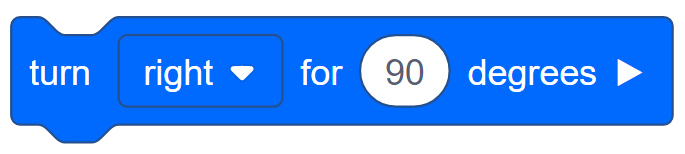
Voimansiirtorobottikokoonpanon avulla opiskelijat voivat ohjelmoida Speedbotin kääntymään valitsemalla [Turn for] -lohkon.
Speedbot on valmis kääntymään!
Tämä tutkimus antaa sinulle työkalut, joiden avulla voit alkaa luoda hienoja projekteja, joita Speedbot voi seurata.
-
VEXcode V5 , jota käytetään tässä tutkimuksessa:
-
Saat lisätietoja lohkosta avaamalla Ohje ja valitsemalla sitten [Turn for] -lohkon.

-
Varmista, että sinulla on tarvittava laitteisto, suunnittelumuistikirja ja VEXcode V5 ladattu ja valmiina.
![]() Opettajan vinkkejä
Opettajan vinkkejä
Jos tämä on ensimmäinen kerta, kun opiskelija käyttää VEXcode V5:tä, hän voi viitata opetusohjelmiin milloin tahansa tämän tutkimisen aikana. Opetusohjelmat sijaitsevat työkalupalkissa.

| Määrä | Tarvittavat materiaalit |
|---|---|
| 1 |
Speedbot robotti |
| 1 |
Ladattu robotin akku |
| 1 |
VEXcode V5 |
| 1 |
USB-kaapeli (jos käytät tietokonetta) |
| 1 |
Tekninen muistikirja |
![]() Opettajan vinkkejä
Opettajan vinkkejä
-
Mallina jokainen vaihe, jolla tarkistetaan, että Speedbot on valmis, jotta oppilaat tottuvat siihen.
Vaihe 1: Tutkimiseen valmistautuminen
Ennen kuin aloitat toiminnan, onko sinulla kaikki nämä asiat valmiina? Tarkista jokainen seuraavista:
-
Ovatko älykaapelit täysin kytketty kaikkiin moottoreihin?
-
Onko Brain päällä?
-
Onko akku ladattu?
Vaihe 2: Aloita uusi projekti
Ennen kuin aloitat projektin, valitse Speedbot (Drivetrain 2-motors, No Gyro) - Malliprojekti. Malliprojekti sisältää Speedbotin moottorikokoonpanon. Jos mallia ei käytetä, robottisi ei suorita projektia oikein.

Avaa malliprojekti suorittamalla seuraavat vaiheet:
-
Avaa Tiedosto-valikko.
-
Valitse Avaa Esimerkit.
-
Valitse ja avaa Speedbot (Drivetrain 2-motors, No Gyro) malli -projekti.
-
Koska käytämme [Turn for] -lohkoa, nimeä projektisi uudelleen Turn.
-
Tallenna projektisi.
-
Tarkista, että projektin nimi Turn on nyt työkalupalkin keskellä olevassa ikkunassa.

![]() Opettajan työkalupakki
-
Projektien tallentaminen
Opettajan työkalupakki
-
Projektien tallentaminen

Huomioi, että kun he ensimmäisen kerran avasivat VEXcode V5:n, ikkunassa oli merkintä VEXcode Project ja sitä ei tallennettu (ilmaistu työkalurivillä). VEXcode Project on projektin oletusnimi, kun VEXcode V5 avataan ensimmäisen kerran. Kun projekti on nimetty uudelleen Turn ja tallennettu, näyttö päivittyy Tallennettu-tilaan. Tämän työkalupalkin ikkunan avulla on helppo tarkistaa, että opiskelijat käyttävät oikeaa projektia ja se tallennetaan. Kun projekti on alun perin tallennettu, VEXcode V5 tallentaa automaattisesti kaikki myöhemmät muutokset, kuten projektin nimen vieressä oleva viesti osoittaa.
Kerro oppilaille, että he ovat nyt valmiita aloittamaan ensimmäisen projektinsa. Selitä oppilaille, että muutamaa yksinkertaista vaihetta noudattamalla he voivat luoda ja suorittaa projektin, joka kääntää Speedbotin.
![]() Opettajan vinkkejä
Opettajan vinkkejä
-
Koska tämä on ohjelmoinnin aloitustoiminto, opettajan tulee mallintaa vaiheet ja pyytää sitten oppilaita suorittamaan samat toiminnot. Opettajan tulee sitten valvoa oppilaita varmistaakseen, että he noudattavat ohjeita oikein.
-
Varmista, että opiskelijat ovat valinneet Tiedosto-valikosta Avaa Esimerkit .
-
Varmista, että opiskelijat ovat valinneet Speedbot (Drivetrain 2-motors, No Gyro) -mallin -projektin.
Voit huomauttaa opiskelijoille, että Esimerkit -sivulla on useita valintoja, joista valita. Kun he rakentavat ja käyttävät muita robotteja, heillä on mahdollisuus käyttää erilaisia malleja.
-
Voit pyytää oppilaita lisäämään nimikirjaimensa tai ryhmänsä nimen projektin nimeen. Tämä auttaa erottamaan projektit, jos pyydät opiskelijoita lähettämään ne.
Vaihe 3: Käänny oikealle
-
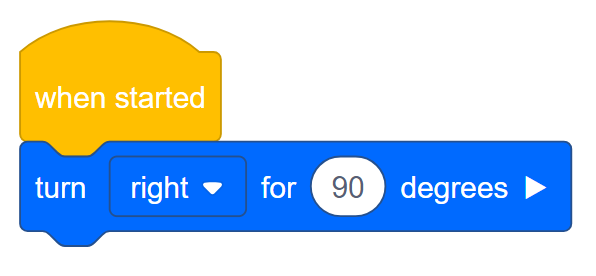
Lisää [Turn for] -lause ohjelmointialueen {When started} -lohkoon.

-
Napsauta Slot -kuvaketta. Voit ladata projektisi johonkin neljästä Robot Brainin käytettävissä olevasta -paikasta . Napsauta numeroa 1.

-
Liitä robotti tietokoneeseen tai tablettiin. Työkalurivin Brain-kuvake muuttuu vihreäksi, kun yhteys on muodostettu.

-
Napsauta työkalupalkin Lataa -painiketta ladataksesi Turn-projektin Robot Brainille.
![]() Opettajan työkalupakki
-
Ohje lohkojen kanssa
Opettajan työkalupakki
-
Ohje lohkojen kanssa
-
Huomaa, että ohjelmointialueella on jo oletusarvoisesti {When started} lohko. Jokainen projekti alkaa tällä lohkolla. Kun projekti käynnistetään, yhdistettyjä lohkoja seurataan siinä järjestyksessä, johon ne on sijoitettu.
Osoita napsauttamalla [Turn for] -lohkoa ja vetämällä se ohjelmointialueelle yhdistämällä se {When started} lohkoon. Kuulet napsahduksen, kun se kiinnittyy.
-
Jos käytät tietokonetta, opiskelijalla tulee olla VEX V5 Robot Brain kytkettynä tietokoneeseen USB-kaapelilla. Jos käytät tablettia, VEX V5 Robot Brain tulee liittää tablettiin Smart Radion avulla.
-
Jos oppilaat käyttävät tietokonetta, pyydä heitä nyt irrottamaan USB-kaapeli Robot Brainista. Jos robotti on kytketty tietokoneeseen projektin aikana, robotti voi vetää liitäntäkaapelista.
![]() Opettajan työkalupakki
-
Pysähdy ja keskustele
Opettajan työkalupakki
-
Pysähdy ja keskustele
Tämä on hyvä hetki pysähtyä ja pyytää opiskelijaa pohtimaan ensimmäistä projektiaan. Opiskelijina:
-
Mitä Speedbot teki projektin aikana?
-
Käyttäytyikö se niin kuin odotit sen projektin perusteella?
Käytä hetki varmistaaksesi, että kaikki opiskelijat ovat suorittaneet tämän vaiheen ilman ongelmia, ennen kuin jatkat.

-
Tarkista Robot Brainin näytöltä, että projektisi on ladattu Speedbot's Brainiin. Projektin nimi tulee olla kohdassa 1.
![]() Opettajan työkalupakki
-
Malli ensin
Opettajan työkalupakki
-
Malli ensin
Mallina projektin suorittamisesta luokan edessä, ennen kuin kaikki oppilaat yrittävät kerralla. Kokoa oppilaat yhdelle alueelle ja jätä tarpeeksi tilaa Speedbotille liikkua, jos se sijoitetaan lattialle. Koska Speedbot jatkaa projektin suorittamista, kunnes Robot Brainin Takaisin-painiketta painetaan, opettaja saattaa haluta valita jonkun auttamaan Speedbotin projektin pysäyttämisessä, kun se on valmis.
Kerro opiskelijoille, että nyt on heidän vuoronsa toteuttaa projektinsa. Varmista, että niillä on selkeä polku ja ettei mikään Speedbot törmää toisiinsa.
-
Suorita projekti Speedbot-robotilla varmistamalla, että projekti on valittu, ja paina sitten Suorita-painiketta.
Vaihe 4: Käänny vasemmalle

-
Muuta [Turn for] näyttämään vasen oikeasijaan.
-
Lataa projekti.
-
Suorita projekti Speedbot-robotilla varmistamalla, että projekti on valittu, ja paina sitten Suorita-painiketta.
![]() Opettajan työkalupakki
-
Vaiheen 4 suorittaminen
Opettajan työkalupakki
-
Vaiheen 4 suorittaminen
-
Jos haluat muuttaa [Turn for] -lohkon arvosta oikea arvoon vasen, napsauta pudotusvalikkoa ja valitse vasen.
-
Jos oppilaat käyttävät tietokonetta, muistuta heitä irrottamaan USB-kaapeli Robot Brainista ennen projektin suorittamista.
Koska emme valitse uutta paikkaa, uusi projekti latautuu paikkaan 1 ja korvaa edellisen projektin.
-
Koska VEXcode V5:ssä on automaattinen tallennus, projektia ei tarvitse tallentaa uudelleen.
Vaihe 5: Odota ja käänny sitten vasemmalle
-
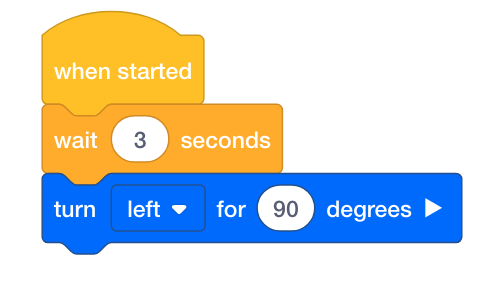
Lisää [Odota] lohko ennen [Turn for] lohkoa. Tämä kehottaa robottia odottamaan ennen kääntymistä vasemmalle.
-
Lisää kolme sekuntia [Odota] -lohkoon. Tämä käskee robottia odottamaan kolme ennen kääntymistä.
-
Lataa projekti.
-
Suorita projekti Speedbot-robotilla varmistamalla, että projekti on valittu, ja paina sitten Suorita-painiketta.
![]() Opettajan työkalupakki
-
Vaiheen 5 suorittaminen
Opettajan työkalupakki
-
Vaiheen 5 suorittaminen
-
[Odota] -lohko voidaan sijoittaa mihin tahansa projektiin. Jos haluat lisätietoja [Odota] -lohkosta, avaa Ohje.
-
[Odota] lohkon käyttäminen ei lopeta projektia.
-
Jos oppilaat käyttävät tietokonetta, muistuta heitä irrottamaan USB-kaapeli Robot Brainista ennen projektin suorittamista.
-
Koska VEXcode V5:ssä on automaattinen tallennus, projektia ei tarvitse tallentaa uudelleen.
![]() Motivoi keskustelua
-
Lohkojen ymmärtäminen
Motivoi keskustelua
-
Lohkojen ymmärtäminen
K: Robotin nykyisen sijainnin tarkastelu nolla asteessa, Jos robotti kääntyi vasemmalle 90 astetta, sitten oikealle 120 astetta ja lopuksi kääntyi vasemmalle 40 astetta, kuinka monessa asteessa robotti olisi tällä hetkellä kääntymisen jälkeen?
A: Robotti on 10 asteen kulmassa. Kääntyessään vasemmalle 90 astetta, robotti kääntyi oikealle 120 astetta. Vasemmalle kääntymisen katsominen liikkuvana positiiviseen suuntaan ja oikealle kääntymisenä vähentämisenä tai liikkumisena negatiiviseen suuntaan - kuten xy-koordinaattitasossa, tämä asettaa robotin nyt -30 asteeseen. Koska 90-120 = -30. -30 astetta alkaen robotti kääntyy vasemmalle 40 astetta. Näin ollen -30 + 40 = 10. Robotti loppuu 10 asteen kulmassa.
K: Robotin nykyisen sijainnin tarkastelu nolla asteessa, robotin kääntäminen 30 astetta oikealle saa robotin loppumaan samaan kohtaan kuin aloitetaan nollasta ja käännetään robottia 330 astetta vasemmalle. Jos robotti kääntyi oikealle 56 astetta ja kuinka monta astetta vasemmalle robotin tulee kääntyä päästäkseen samaan paikkaan olettaen, että se alkaa nollasta?
A: Koska robotin kääntäminen kokonaan ympäri on 360 astetta, voit lisätä ja vähentää 360 astetta laskeaksesi kuinka robotin tulee kääntyä. 360 - 56 = 304. Näin ollen robotin on käännyttävä 304 astetta vasemmalle, jotta se päättyy samaan paikkaan kuin kääntyminen 56 astetta oikealle.
Vaihe 6: Suorita turvakamerahaaste!

 Turvakamerahaasteessa robotin on aloitettava kääntymällä oikealle 90 astetta. Robotti kääntyy sitten vasemmalle 180 astetta ja oikealle 180 astetta "skannaamalla" aivan kuten valvontakamera. Tämän jälkeen robotti toistaa kääntymisen 180 astetta vasemmalle ja 180 astetta oikealle vielä kaksi kertaa. Siten robotti skannaa 180 astetta yhteensä kolme kertaa.
Turvakamerahaasteessa robotin on aloitettava kääntymällä oikealle 90 astetta. Robotti kääntyy sitten vasemmalle 180 astetta ja oikealle 180 astetta "skannaamalla" aivan kuten valvontakamera. Tämän jälkeen robotti toistaa kääntymisen 180 astetta vasemmalle ja 180 astetta oikealle vielä kaksi kertaa. Siten robotti skannaa 180 astetta yhteensä kolme kertaa.
Ennen kuin ohjelmoit robotin, suunnittele robotin polku ja käyttäytyminen suunnittelumuistikirjassasi.
Turvakamerahaasteen suorittamisen jälkeen pystyt yhdistämään eteen- ja taaksepäin suuntautuvat liikkeet ylimääräisiin robottikäyttäytymiseen, jotta voit suorittaa entistä edistyneempiä haasteita.
![]() Opettajan työkalupakki
-
Ratkaisut
Opettajan työkalupakki
-
Ratkaisut


![]() Opettajan vinkkejä
Opettajan vinkkejä
Vahvista, että robotti suoritti haasteen onnistuneesti katsomalla robotin aloitusasentoa, ja laske varmistaaksesi, että robotti on suorittanut oikeat toiminnot. Robotin tulee kääntyä oikealle 90 astetta ja toistaa sitten kolme kertaa: käänny vasemmalle 180 astetta ja käänny oikealle 180 astetta.