
![]() 教師工具箱
-
活動大綱
教師工具箱
-
活動大綱
-
這次探索將向學生介紹基本的右轉、左轉和等待程式設計行為。
-
使用動力傳動系統機器人配置,學生只需選擇 [Turn for] 塊即可對 Speedbot 進行編程以使其轉動。
Speedbot 已準備好轉彎!
這次探索將為您提供一些工具,讓您能夠開始創建一些很酷的項目供您的 Speedbot 遵循。
-
本次探索將使用的 VEXcode V5 :
-
要了解有關該區塊的更多信息,請打開 幫助 ,然後選擇 [Turn for] 區塊。

-
確保您已下載並準備好所需的硬體、工程筆記本和 VEXcode V5。
![]() 老師提示
老師提示
如果這是學生第一次使用 VEXcode V5,他們可以在探索過程中隨時參考教學。 教學位於工具列中。

| 數量 | 所需材料 |
|---|---|
| 1 |
Speedbot機器人 |
| 1 |
充滿電的機器人電池 |
| 1 |
VEXcode V5 |
| 1 |
USB 連接線(如果使用電腦) |
| 1 |
工程筆記本 |
![]() 老師提示
老師提示
-
對檢查 Speedbot 是否準備就緒的每個步驟進行建模,以便學生養成這樣做的習慣。
第 1 步:為探索做準備
在開始活動之前,您是否已準備好這些物品? 檢查以下各項:
第 2 步:開始一個新項目
在開始專案之前,選擇 Speedbot(傳動系統 2 電機,無陀螺儀)- 模板專案。 模板項目包含 Speedbot 的馬達配置。 如果不使用模板,您的機器人將無法正確運行專案。

完成以下步驟開啟範本項目:
-
開啟檔案選單。
-
選擇 打開範例。
-
選擇並開啟 Speedbot(傳動系統 2 電機,無陀螺儀)模板 項目。
-
由於我們將使用 [Turn for] 區塊,因此將您的項目重新命名為 Turn。
-
保存 您的項目。
-
檢查並確保項目名稱 Turn 現在位於工具列中央的視窗中。

![]() 教師工具箱
-
保存項目
教師工具箱
-
保存項目

指出當他們第一次打開 VEXcode V5 時,視窗標記為 VEXcode Project 並且未儲存(在工具列上指示)。 VEXcode Project 是首次開啟 VEXcode V5 時的預設專案名稱。 將項目重新命名為“Turn”並儲存後,顯示內容將更新為“Saved”。 使用工具列中的此窗口,可以輕鬆檢查學生是否使用了正確的項目並保存了項目。 最初儲存專案後,VEXcode V5 會自動儲存任何後續更改,如專案名稱旁的訊息所示。
告訴學生他們現在已經準備好開始他們的第一個專案。 向學生解釋,透過執行幾個簡單的步驟,他們將能夠創建並運行一個可以轉動 Speedbot 的專案。
![]() 老師提示
老師提示
-
由於這是編程的初級活動,教師應該模擬這些步驟,然後要求學生完成相同的動作。 然後,教師應監督學生,以確保他們正確遵循步驟。
-
確保學生已從“文件”選單中選擇“開啟 範例 。
-
確保學生已選擇 Speedbot(傳動系統 2 電機,無陀螺儀)模板 項目。
您可以向學生指出 範例 頁面上有多個選項可供選擇。 當他們建造和使用其他機器人時,他們將有機會使用不同的模板。
-
您可以要求學生將他們的姓名縮寫或小組名稱新增至專案名稱。 如果您要求學生提交項目,這將有助於區分項目。



![]() 教師工具箱
-
幫助區塊
教師工具箱
-
幫助區塊
-
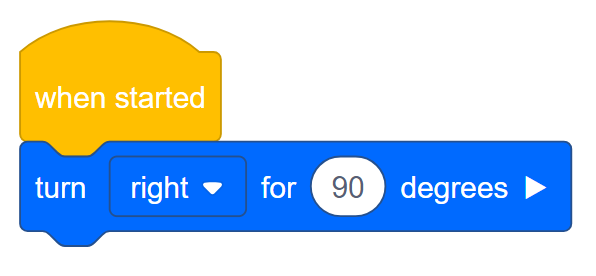
指出在程式區中,預設已經有一個 {When started} 塊位於該處。 每個項目都將從這個區塊開始。 當專案啟動時,連接的區塊將按照它們放置的順序進行。
示範點擊[Turn for]區塊並將其拖曳至程式區域,將其連接到 {When started} 區塊。 連接時您會聽到咔噠聲。
-
如果您使用計算機,學生應使用 USB 電纜將 VEX V5 Robot Brain 連接到計算機。 如果您使用平板電腦,則應使用智慧型無線電將 VEX V5 Robot Brain 連接到平板電腦。
-
如果學生使用計算機,請立即要求他們斷開 USB 電纜與 Robot Brain 的連接。 在運行專案時將機器人連接到電腦可能會導致機器人拉動連接電纜。
![]() 教師工具箱
-
停下來討論
教師工具箱
-
停下來討論
這是暫停並讓學生反思運行他們的第一個專案的好時機。 作為學生:
-
當你運行這個專案時,Speedbot 做了什麼?
-
根據項目,它的行為是否符合您的預期?
在繼續之前,請花點時間確保所有學生都已完成此步驟,沒有任何問題。

-
透過查看機器人大腦的螢幕來檢查以確保您的專案已下載到 Speedbot 的大腦。 項目名稱應列在 slot 1。
![]() 教師工具箱
-
模型優先
教師工具箱
-
模型優先
在讓所有學生立即嘗試之前,在全班面前示範運行該計畫。 將學生聚集在一個區域,並為 Speedbot 放置在地板上時留出足夠的移動空間。 由於 Speedbot 將繼續運行該項目,直到按下機器人大腦上的後退按鈕,因此教師可能希望選擇某人在 Speedbot 的項目完成時協助停止該項目。
告訴學生現在輪到他們來運行他們的專案了。 確保它們有暢通的路徑,並且速度機器人不會互相碰撞。

![]() 教師工具箱
-
完成步驟 4
教師工具箱
-
完成步驟 4
-
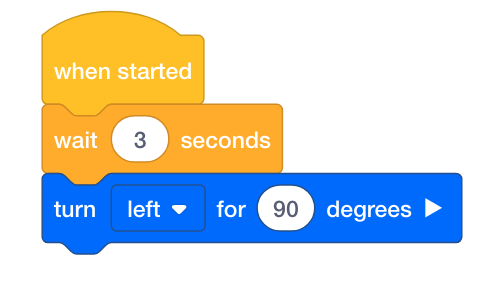
要將 [Turn for] 區塊從 right 更改為 left,只需點擊下拉式選單並選擇 left。
-
如果學生使用計算機,請提醒他們在運行專案之前斷開 Robot Brain 的 USB 電纜。
因為我們沒有選擇新插槽,所以新項目將下載到插槽 1 並替換先前的項目。
-
由於VEXcode V5具有自動儲存功能,因此無需再次儲存專案。
![]() 教師工具箱
-
完成步驟 5
教師工具箱
-
完成步驟 5
-
[Wait] 塊可以放置在項目中的任何位置。 有關 [Wait] 塊的更多信息,請打開 幫助。
-
使用 [Wait] 塊不會結束項目。
-
如果學生使用計算機,請提醒他們在運行專案之前斷開 Robot Brain 的 USB 電纜。
-
由於VEXcode V5具有自動儲存功能,因此無需再次儲存專案。
![]() 激發討論
-
理解模組
激發討論
-
理解模組
Q: 查看機器人目前零度位置,如果機器人左轉 90 度,再右轉 120 度,最後左轉 40 度,那麼機器人完成轉彎後目前位置是多少度?
A: 機器人將處於 10 度。 左轉90度後,機器人右轉120度。 將左轉視為沿正方向移動,將右轉視為減法或沿負方向移動 - 類似於 xy 座標平面,現在這會將機器人置於 -30 度。 因為 90-120 = -30。 從 -30 度開始,機器人左轉 40 度。 因此,-30 + 40 = 10。 機器人以 10 度結束。
Q: 查看機器人在 0 度的當前位置,將機器人向右轉動 30 度,機器人將完成與從 0 度開始並向機器人轉 330 度相同的位置。 如果機器人右轉 56 度,假設從 0 度開始,機器人需要向左轉多少度才能在同一位置結束?
A: 由於機器人完全轉動是 360 度,因此您可以對 360 度進行加減來計算機器人需要如何轉動。 360 - 56 = 304。 因此,機器人必須向左轉 304 度,才能在向右轉動 56 度的相同位置結束。
第 6 步:完成安全攝影機挑戰!

 在安全攝影機挑戰賽中,機器人必須先向右旋轉 90 度。 然後機器人會向左轉 180 度,然後向右轉動 180 度,就像安全攝影機一樣「掃描」。 然後,機器人將再重複向左轉 180 度和向右轉動 180 度兩次。 因此,機器人將總共掃描 3 次 180 度。
在安全攝影機挑戰賽中,機器人必須先向右旋轉 90 度。 然後機器人會向左轉 180 度,然後向右轉動 180 度,就像安全攝影機一樣「掃描」。 然後,機器人將再重複向左轉 180 度和向右轉動 180 度兩次。 因此,機器人將總共掃描 3 次 180 度。
在對機器人進行程式設計之前,請在工程筆記本中規劃機器人的路徑和行為。
完成安全攝影機挑戰後,您將能夠將向前和向後移動與其他機器人行為相結合,以完成更高級的挑戰。


![]() 老師提示
老師提示
透過觀察機器人的起始位置來驗證機器人是否成功完成了挑戰,並計數以確保機器人執行了正確的動作。 機器人應右轉 90 度,然後重複 3 次:左轉 180 度,右轉 180 度。