
![]() 教師ツールボックス
-
アクティビティ概要
教師ツールボックス
-
アクティビティ概要
-
この探索では、右折、左折、待機などの基本的なプログラミング動作を学生に紹介します。
-
ドライブトレイン ロボット構成を使用すると、生徒は [Turn for] ブロックを選択するだけで Speedbot が回転するようにプログラムできます。
スピードボットは方向転換する準備ができました!
この探索により、Speedbot が従うクールなプロジェクトの作成を開始できるツールが提供されます。
-
この調査で使用される VEXcode V5 :
-
ブロックの詳細情報を確認するには、 ヘルプ を開いて、[Turn for] ブロックを選択します。

-
必要なハードウェア、エンジニアリング ノートブック、VEXcode V5 がダウンロードされ、準備ができていることを確認してください。
![]() 教師のヒント
教師のヒント
学生が初めて VEXcode V5 を使用する場合は、学習中にいつでもチュートリアルを参照できます。 チュートリアルはツールバーにあります。

| 量 | 必要な材料 |
|---|---|
| 1 |
スピードボットロボット |
| 1 |
充電されたロボットバッテリー |
| 1 |
VEXコードV5 |
| 1 |
USBケーブル(コンピュータを使用する場合) |
| 1 |
エンジニアリングノートブック |
![]() 教師のヒント
教師のヒント
-
スピードボットの準備ができているかどうかを確認するための各手順をモデルとして示し、生徒がその手順を実行する習慣を身に付けられるようにします。
ステップ1: 探索の準備
アクティビティを始める前に、これらのアイテムはすべて準備されていますか? 次の各項目を確認してください。
-
スマートケーブル すべてのモーターに完全に挿入されていますか?
-
バッテリーは充電されて ?
ステップ2:新しいプロジェクトを開始する
プロジェクトを開始する前に、Speedbot (ドライブトレイン 2 モーター、ジャイロなし) - テンプレート プロジェクトを選択します。 テンプレート プロジェクトには、Speedbot のモーター構成が含まれています。 テンプレートを使用しないと、ロボットはプロジェクトを正しく実行しません。

テンプレート プロジェクトを開くには、次の手順を実行します。
-
ファイルメニューを開きます。
-
例を開くを選択します。
-
Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを選択して開きます。
-
[Turn for]ブロックを使用するので、プロジェクトの名前を Turnに変更します
-
プロジェクト保存し 。
-
プロジェクト名 Turn がツールバーの中央のウィンドウに表示されていることを確認します。

![]() 教師ツールボックス
-
プロジェクトの保存
教師ツールボックス
-
プロジェクトの保存

初めて VEXcode V5 を開いたときに、ウィンドウに VEXcode Project というラベルが付いていて、保存されていなかった (ツールバーに表示) ことを指摘します。 VEXcode プロジェクトは、VEXcode V5 を初めて開いたときのデフォルトのプロジェクト名です。 プロジェクトの名前を Turn に変更して保存すると、表示が「Saved」に更新されます。 ツールバーのこのウィンドウを使用すると、生徒が正しいプロジェクトを使用していて、それが保存されていることを簡単に確認できます。 プロジェクトが最初に保存されると、VEXcode V5 はプロジェクト名の横のメッセージに示されているように、その後の変更をすべて自動保存します。
生徒たちに、最初のプロジェクトを始める準備ができたことを伝えます。 いくつかの簡単な手順に従うだけで、スピードボットを動かすプロジェクトを作成して実行できることを生徒に説明します。
![]() 教師のヒント
教師のヒント
-
これはプログラミングの初歩的なアクティビティなので、教師が手順を示し、生徒に同じアクションを実行するように指示する必要があります。 次に、教師は生徒が手順を正しく実行しているかどうかを確認するために生徒を監視する必要があります。
-
生徒が「ファイル」メニューから「開く 例 を選択したことを確認します。
-
生徒が Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを選択したことを確認します。
例 ページには選択できる項目がいくつかあることを生徒に指摘できます。 他のロボットを組み立てて使用すると、さまざまなテンプレートを使用する機会が得られます。
-
生徒にプロジェクト名に自分のイニシャルやグループ名を追加するよう依頼できます。 これは、学生にプロジェクトを提出するよう依頼する場合に、プロジェクトを区別するのに役立ちます。
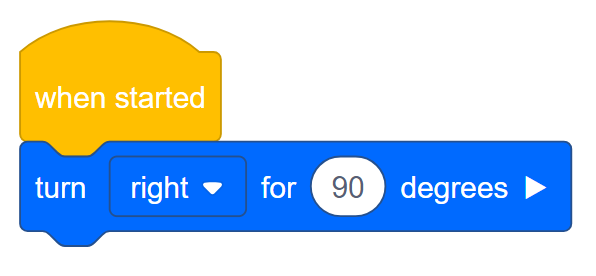
ステップ3: 右折
-
プログラミングエリアの {When started} ブロックに[Turn for]ブロックを追加します。


-
ロボットをコンピューターまたはタブレットに接続します。 接続が成功すると、ツールバーの Brain アイコンが緑色に変わります。

-
ツールバーの ダウンロード ボタンをクリックして、Turn プロジェクトを Robot Brain にダウンロードします。
![]() 教師用ツールボックス
-
ブロックのヘルプ
教師用ツールボックス
-
ブロックのヘルプ
-
プログラミング領域には、デフォルトですでに {When started} ブロックが配置されていることを指摘します。 すべてのプロジェクトはこのブロックから始まります。 プロジェクトが開始されると、接続されたブロックは配置された順序で追跡されます。
[Turn for] ブロックをクリックしてプログラミング領域にドラッグし、 {When started} ブロックに接続する方法を説明します。 取り付けるとカチッという音が聞こえます。
-
コンピュータを使用する場合、生徒は USB ケーブルを使用して VEX V5 Robot Brain をコンピュータに接続する必要があります。 タブレットを使用している場合は、スマートラジオを使用して VEX V5 Robot Brain をタブレットに接続する必要があります。
-
生徒がコンピュータを使用している場合は、ロボット ブレインから USB ケーブルを取り外すように指示します。 プロジェクトの実行中にロボットをコンピューターに接続すると、ロボットが接続ケーブルを引っ張る可能性があります。
![]() 教師ツールボックス
-
立ち止まって話し合う
教師ツールボックス
-
立ち止まって話し合う
ここで立ち止まって、生徒に最初のプロジェクトの実行について振り返ってもらうとよいでしょう。 学生として:
-
プロジェクトを実行したとき、Speedbot は何を行いましたか?
-
プロジェクトに基づいて期待どおりに動作しましたか?
次に進む前に、少し時間を取って、すべての学生が問題なくこのステップを完了したことを確認してください。

-
ロボット ブレインの画面を見て、プロジェクトが Speedbot のブレインにダウンロードされたことを確認します。 プロジェクト名は スロット 1にリストされる必要があります。
![]() 教師用ツールボックス
-
モデルファースト
教師用ツールボックス
-
モデルファースト
生徒全員に一度に挑戦してもらう前に、クラスの前でプロジェクトの実行をモデル化します。 生徒を 1 つのエリアに集め、スピードボットを床に置く場合にスピードボットが動けるだけの十分なスペースを残します。 スピードボットは、ロボット ブレインの戻るボタンが押されるまでプロジェクトの実行を継続するため、教師は、スピードボットのプロジェクトが終了したときに停止するのを手伝ってくれる人を選ぶとよいでしょう。
今度は生徒たちがプロジェクトを実行する番だと伝えます。 明確な経路があり、スピードボット同士が衝突しないことを確認してください。
-
プロジェクトが選択されていることを確認してから「実行」ボタンを押し、Speedbot ロボットでプロジェクトを実行します。
ステップ4: 左折する

-
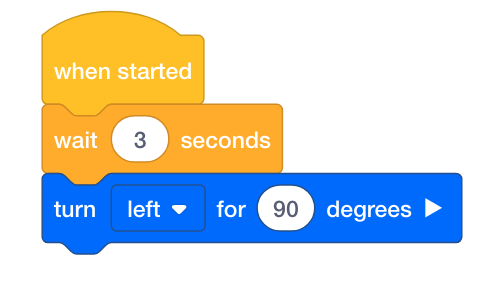
[回転]を 右の代わりに 左 と表示するように変更します。
-
プロジェクトをダウンロード します。
![]() 教師ツールボックス
-
ステップ 4 の完了
教師ツールボックス
-
ステップ 4 の完了
-
[Turn for] ブロックを right から leftに変更するには、ドロップダウン メニューをクリックして leftを選択します。
-
生徒がコンピュータを使用している場合は、プロジェクトを実行する前に Robot Brain から USB ケーブルを取り外すように生徒に伝えてください。
新しいスロットを選択しないため、新しいプロジェクトはスロット 1 にダウンロードされ、以前のプロジェクトが置き換えられます。
-
VEXcode V5 には自動保存機能があるため、プロジェクトを再度保存する必要はありません。
ステップ5: 待ってから左に曲がる
-
[ターン] ブロックの前に [待機] ブロックを追加します。 これにより、ロボットは左に曲がる前に待機するように指示されます。
-
[Wait] ブロックに 3 秒を挿入します。 これはロボットに、方向転換する前に 3 秒待つように指示します。
-
プロジェクトをダウンロード します。
![]() 教師用ツールボックス
-
ステップ 5 の完了
教師用ツールボックス
-
ステップ 5 の完了
-
[Wait] ブロックはプロジェクト内のどこにでも配置できます。 [Wait] ブロックの詳細については、 ヘルプを開いてください。
-
[Wait] ブロックを使用してもプロジェクトは終了しません。
-
生徒がコンピュータを使用している場合は、プロジェクトを実行する前に Robot Brain から USB ケーブルを取り外すように生徒に伝えてください。
-
VEXcode V5 には自動保存機能があるため、プロジェクトを再度保存する必要はありません。
![]() ディスカッションを促す
-
ブロックを理解する
ディスカッションを促す
-
ブロックを理解する
質問: ロボットの現在の位置を 0 度として、ロボットが左に 90 度回転し、次に右に 120 度回転し、最後に左に 40
度回転した場合、回転を終えた後のロボットの現在の位置は何度になりますか?
回答: ロボットの位置は 10 度になります。
ロボットは左に90度回転した後、右に120度回転しました。 左に曲がることを正の方向への移動と見なし、右に曲がることを減算または負の方向への移動と見なすと、xy
座標平面と同様に、ロボットは -30 度の位置になります。 90-120 = -30 なので。 -30 度から、ロボットは左に 40 度回転します。 したがって、-30 +
40 = 10 です。 ロボットは10度で終了します。
質問: ロボットの現在の位置を 0 度として、ロボットを右に 30 度回転させると、ロボットは 0 度から開始して左に 330
度回転させた場合と同じ場所で終了します。 ロボットが右に 56 度回転した場合、0
度から開始すると仮定して、同じ場所に到達するまでにロボットを左に何度回転させる必要があるでしょうか?
A: ロボットを完全に回転させるには
360 度かかるため、360 度を加算または減算して、ロボットがどの程度回転する必要があるかを計算できます。 360 - 56 = 304 です。 したがって、ロボットは、右に
56 度回転したのと同じ場所に到達するには、左に 304 度回転する必要があります。
ステップ 6: セキュリティ カメラ チャレンジを完了します。

 セキュリティ
カメラ チャレンジでは、ロボットはまず右に 90 度回転する必要があります。 その後、ロボットは防犯カメラのように左に 180 度回転し、次に右に 180
度回転して「スキャン」します。 その後、ロボットは左に 180 度、右に 180 度回転する動作をさらに 2 回繰り返します。 したがって、ロボットは合計 3 回 180
度をスキャンします。
セキュリティ
カメラ チャレンジでは、ロボットはまず右に 90 度回転する必要があります。 その後、ロボットは防犯カメラのように左に 180 度回転し、次に右に 180
度回転して「スキャン」します。 その後、ロボットは左に 180 度、右に 180 度回転する動作をさらに 2 回繰り返します。 したがって、ロボットは合計 3 回 180
度をスキャンします。
ロボットをプログラミングする前に、エンジニアリング ノートブックでロボットのパスと動作を計画します。
セキュリティ カメラ チャレンジを完了すると、前進と後退の動きと追加のロボット動作を組み合わせて、さらに高度なチャレンジを完了できるようになります。


![]() 教師のヒント
教師のヒント
ロボットの開始位置を観察してロボットがチャレンジを正常に完了したことを確認し、ロボットが正しいアクションを実行したことを確認するためにカウントします。 ロボットは右に 90 度回転し、次に左に 180 度回転、右に 180 度回転を 3 回繰り返します。