
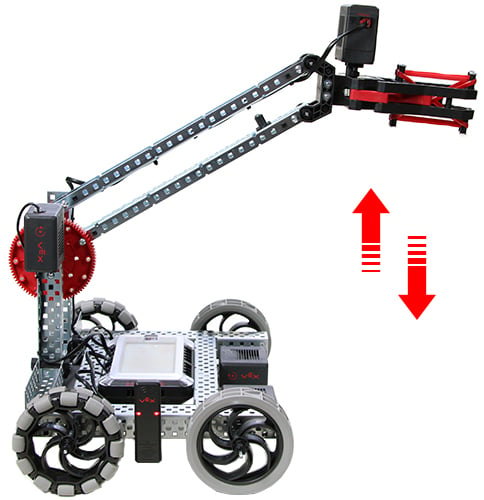
روبوت V5 Clawbot جاهز للوصول!
سيمنحك هذا الاستكشاف الأدوات اللازمة لتتمكن من البدء في إنشاء بعض المشاريع الرائعة التي تستخدم ذراع V5 Clawbot.
- تتضمن VEXcode V5 التي سيتم استخدامها في هذا الاستكشاف ما يلي:

- لمعرفة المزيد من المعلومات حول الكتلة، افتح "المساعدة" ثم حدد الكتلة [دوران لـ] .

- تأكد من أن لديك الأجهزة المطلوبة ودفتر الهندسة الخاص بك وبرنامج VEXcode V5 الذي تم تنزيله وأنك جاهز.
![]() نصائح للمعلم
نصائح للمعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode V5، فيمكنه الرجوع إلى البرامج التعليمية في أي وقت أثناء هذا الاستكشاف. توجد البرامج التعليمية في شريط الأدوات

| كمية | المواد المطلوبة |
|---|---|
| 1 |
مجموعة أدوات بدء تشغيل VEX V5 Classroom (مع البرامج الثابتة المحدثة) |
| 1 |
كود VEX الإصدار 5 |
| 1 |
دفتر الهندسة |
| 1 |
مشروع نموذجي لـ Clawbot (نظام نقل الحركة ثنائي المحرك، بدون جيروسكوب) |
![]() نصائح للمعلم
نصائح للمعلم
قم بعمل نموذج لكل خطوة من خطوات استكشاف الأخطاء وإصلاحها للطلاب.
الخطوة 2: بدء مشروع جديد
قبل أن تبدأ مشروعك، حدد قالب المشروع الصحيح. يحتوي مشروع نموذج القالب Clawbot (Drivetrain 2-motor, No Gyro) على تكوين محركات Clawbot. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.

أكمل الخطوات التالية:
- افتح قائمة الملف.
- إختر مفتوح أمثلة.

- قم باختيار مشروع المثال القالب Clawbot (Drivetrain 2-motor, No Gyro) وافتحه.
- نظرًا لأننا سنقوم بالبرمجة للتحكم في الذراع، قم بإعادة تسمية مشروعك ArmControl.
- احفظ مشروعك.
- تأكد من أن اسم المشروع ArmControl موجود الآن في النافذة الموجودة في منتصف شريط الأدوات.

![]() نصائح للمعلم
نصائح للمعلم
-
نظرًا لأن هذا نشاط تمهيدي في البرمجة، فيجب على المعلم أن يقوم بعمل نموذج للخطوات، ثم يطلب من الطلاب إكمال نفس الإجراءات. يجب على المعلم بعد ذلك مراقبة الطلاب للتأكد من أنهم يتبعون الخطوات بشكل صحيح.
-
تأكد من أن الطلاب قد اختاروا فتح الأمثلة من قائمة الملف.
-
تأكد من أن الطلاب قد اختاروا مشروع مثال القالب Clawbot (Drivetrain 2-motor, No Gyro) .
يمكنك الإشارة للطلاب إلى وجود العديد من الاختيارات التي يمكنهم الاختيار من بينها في صفحة أمثلة . مع قيامهم ببناء واستخدام الروبوتات الأخرى، سيكون لديهم فرصة لاستخدام قوالب مختلفة.
-
يمكنك أن تطلب من الطلاب إضافة الأحرف الأولى من أسمائهم أو اسم مجموعتهم إلى اسم المشروع. سيساعدك هذا على التمييز بين المشاريع إذا طلبت من الطلاب تقديمها.
![]() صندوق أدوات المعلم
-
حفظ المشاريع
صندوق أدوات المعلم
-
حفظ المشاريع
أشر إلى أنه عند فتح VEXcode V5 لأول مرة، تم تسمية النافذة مشروع VEXcode ولم يتم حفظها (كما هو موضح على شريط الأدوات). مشروع VEXcode هو اسم المشروع الافتراضي عند فتح VEXcode V5 لأول مرة. بمجرد إعادة تسمية المشروع إلى ArmControl وحفظه، تم تحديث العرض إلى "محفوظ". باستخدام هذه النافذة في شريط الأدوات، من السهل التأكد من أن الطلاب يستخدمون المشروع الصحيح وتم حفظه.
بمجرد حفظ المشروع مبدئيًا، يقوم VEXcode V5 بحفظ أي تغييرات لاحقة تلقائيًا، كما هو موضح بواسطة الرسالة الموجودة بجوار اسم المشروع.
أخبر الطلاب أنهم الآن مستعدون لبدء مشروعهم الأول. اشرح للطلاب أنه بمجرد اتباع بعض الخطوات البسيطة، سيتمكنون من إنشاء وتشغيل مشروع من شأنه رفع وخفض ذراع Clawbot.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
هذه نقطة جيدة للتوقف مؤقتًا وجعل مجموعات الطلاب تراجع الخطوات التي تم إكمالها للتو عند بدء مشروع جديد في VEXcode V5.
الخطوة 3: حرك الذراع لأعلى
سنبدأ الآن ببرمجة الذراع للرفع!
- أضف الكتلة [Spin for] أسفل الكتلة {When started} في منطقة البرمجة.
- شاهد البرنامج التعليمي الخاص بتحريك الذراع في VEXcode V5 إذا كنت ترغب في الحصول على عرض توضيحي.

- انقر على أيقونة فتحة . يمكنك تنزيل مشروعك على إحدى الفتحات المتاحة في Robot Brain. انقر فوق الفتحة 1.

- قم بتوصيل الروبوت بالكمبيوتر أو الجهاز اللوحي الخاص بك. يتحول لون أيقونة الدماغ في شريط الأدوات إلى اللون الأخضر بعد إجراء اتصال ناجح.

- انقر فوق الزر تنزيل على شريط الأدوات لتنزيل مشروع Drive إلى Robot Brain.
![]() صندوق أدوات المعلم
-
مساعدة في الكتل
صندوق أدوات المعلم
-
مساعدة في الكتل
-
أشر إلى أنه في منطقة البرمجة، يوجد بالفعل كتلة {When started} تقع هناك بشكل افتراضي. كل مشروع سيبدأ بهذه الكتلة. عند بدء المشروع، سيتم اتباع الكتل المتصلة بالترتيب الذي تم وضعها فيه.
قم بإظهار كيفية النقر على الكتلة [Spin for] وسحبها إلى منطقة البرمجة، وتوصيلها بالكتلة {When started} . سوف تسمع صوت نقرة عند تثبيته.
-
إذا كنت تستخدم جهاز كمبيوتر، فيجب على الطالب توصيل روبوت VEX V5 بالكمبيوتر باستخدام كابل USB . إذا كنت تستخدم جهازًا لوحيًا، فيجب توصيل روبوت VEX V5 بالجهاز اللوحي باستخدام Smart Radio.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، اطلب منهم الآن فصل كابل USB عن دماغ الروبوت. قد يؤدي توصيل الروبوت بالكمبيوتر أثناء تشغيل مشروع ما إلى قيام الروبوت بسحب كابل الاتصال.

- تأكد من أن مشروع ArmControl تم تنزيله إلى الدماغ في الفتحة التي اخترتها.
![]() صندوق أدوات المعلم
-
خيار النمذجة أولاً
صندوق أدوات المعلم
-
خيار النمذجة أولاً
نموذج تشغيل المشروع أمام الفصل قبل أن يحاول جميع الطلاب القيام به مرة واحدة. اجمع الطلاب في منطقة واحدة واترك مساحة كافية لـ Clawbot لتحريك ذراعه. أظهر كيفية إنهاء المشروع وإرجاع ذراع Clawbot إلى وضع الراحة.
أخبر الطلاب أنه حان دورهم الآن لتشغيل مشاريعهم. تأكد من أن لديهم مساحة كافية لرفع ذراع Clawbot بأمان.
- قمالمشروع على عن طريق التأكد من تحديد المشروع ثم اضغط على زر التشغيل. أهنئك على إنشاء أول مشروع Claw Arm الخاص بك!
الخطوة 4: جرب هذا: برمجة الذراع لأسفل
الآن بعد أن قمت ببرمجة الذراع للتحرك لأعلى، فسوف تقوم الآن ببرمجة الذراع للخفض أو التحرك لأسفل.

![]()
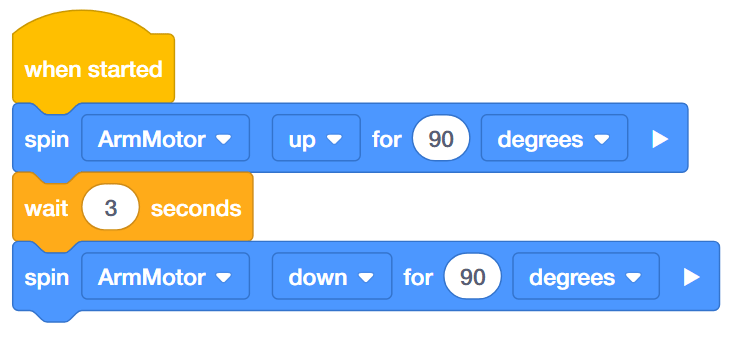
- أضف كتلة [انتظر] وكتلة [دوران لـ] إلى مشروع ArmControl الخاص بك بحيث يرتفع الذراع إلى 90 درجة، وينتظر لمدة 3 ثوانٍ، ثم يعود إلى الأسفل مرة أخرى.
تلميح: ستحتاج إلى تغيير الاتجاه داخل كتلة [دوران لـ] . لمزيد من المعلومات حول كتلة [انتظار]، راجع ميزة تعليمات VEXcode V5. - اختبر المشروع الذي قمت بمراجعته للتأكد من أنه يحرك الذراع لأعلى بمقدار 90 درجة، وينتظر لمدة ثلاث ثوانٍ، ثم يحرك الذراع لأسفل بمقدار 90 درجة من خلال تنزيل و تشغيل مشروع ArmControl الخاص بك.
- لاحظ أن الذراع يحافظ على موضعه أثناء تشغيل كتلة [انتظار]. يستمد المحرك الطاقة من البطارية ليحمل الذراع في مواجهة قوة الجاذبية. يرجع ذلك إلى أن الإعداد الافتراضي لإيقاف المحرك هو الإعداد <Hold> . هناك إعدادان آخران للتوقف - <Brake> و <Coast>. سوف تتعلم عن ذلك في مختبر آخر.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
تم تحريك الذراع إلى الأعلى مسبقًا باستخدام كتلة [Spin for] مع معلمات مضبوطة على "Up" و"90 degrees". يجب على الطلاب الآن إضافة كتلة [انتظر] مضبوطة على "3 ثوانٍ" وكتلة ثانية [دوران لمدة] مضبوطة على "لأسفل". لا يلزم تغيير معلمة 90 درجة حتى يعود الذراع إلى موضعه الأصلي.
أثناء تشغيل كتلة [انتظار] ، سيحتفظ الذراع بموضعه لأن "التثبيت" هو النوع الافتراضي لإيقاف المحرك الذكي V5. من المهم ملاحظة أنه إذا تم ضبط نوع التوقف على الفرامل أو الانزلاق، فإن الذراع ستبدأ في السقوط إلى الأسفل بسبب وزنها وقوة الجاذبية.
الخطوة 5: أكمل تحدي مراقب حركة الطيران
![]() في تحدي مراقب حركة الطيران، يجب على Clawbot تحريك ذراعه لأعلى ولأسفل كل مرة لمدة 90 درجة، والانتظار لمدة 3 ثوانٍ، وتحريك الذراع لأعلى ولأسفل مرتين كل مرة لمدة 45 درجة مرتين، والانتظار لمدة 5 ثوانٍ، ثم تحريك الذراع لأعلى ولأسفل ثلاث مرات لمدة 90 درجة.
في تحدي مراقب حركة الطيران، يجب على Clawbot تحريك ذراعه لأعلى ولأسفل كل مرة لمدة 90 درجة، والانتظار لمدة 3 ثوانٍ، وتحريك الذراع لأعلى ولأسفل مرتين كل مرة لمدة 45 درجة مرتين، والانتظار لمدة 5 ثوانٍ، ثم تحريك الذراع لأعلى ولأسفل ثلاث مرات لمدة 90 درجة.
فيما يلي قائمة بسلوكيات Clawbot:
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
- انتظر 3 ثواني.
- حرك الذراع لأعلى ثم لأسفل بزاوية 45 درجة.
- حرك الذراع لأعلى ثم لأسفل بزاوية 45 درجة.
- انتظر 5 ثواني.
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
- حرك الذراع لأعلى ثم لأسفل بزاوية 90 درجة.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
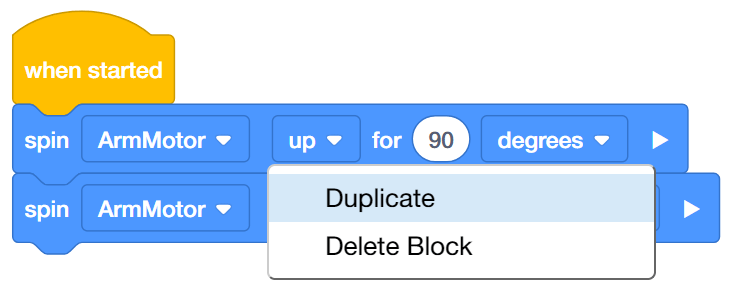
معظم الكتل الموجودة ضمن هذا التحدي هي [دوران لـ] كتلة. بعد إضافة كتلة [دوران لـ] لتحريك الذراع لأعلى وكتلة واحدة لتحريك الذراع لأسفل، يمكنك النقر بزر الماوس الأيمن أو النقر لفترة طويلة على أول [دوران لـ] واختيار تكرار لإضافة كتلتين ثالثة ورابعة [دوران لـ] وهكذا. هناك حاجة إلى اثني عشر [دوران لـ] كتلة في المجموع لهذا التحدي. بعد ذلك، يمكن تغيير المعلمات لتلبية التحدي وإضافة [انتظر] كتلة بين [دوران لـ] كتل.
- مثال لمراجعة تحدي مراقب حركة الطيران الحلول (Google Doc / .docx / .pdf )
- معايير البرمجة (Google Doc / .docx / .pdf )