로봇 팔 프로그래밍 - 블록 기반
![]() 교사 도구 상자
개요
교사 도구 상자
개요
-
이 탐구를 통해 학생들은 V5 클로봇의 팔 모터에 대한 기본 프로그래밍을 배우게 됩니다.
-
팔 모터를 프로그래밍하는 법을 배우면 학생들은 V5 클로봇의 팔 움직임을 올바르게 제어할 수 있습니다. 사용된 블록에 대한 자세한 내용은도움말 정보참조하세요.
V5 클로봇이 도착할 준비가 되었습니다!
이 탐색을 통해 V5 클로봇의 팔을 사용하여 멋진 프로젝트를 만드는 데 필요한 도구를 얻을 수 있습니다.
- 이 탐사에 사용될 VEXcode V5는 다음과 같습니다.

- 블록에 대한 자세한 내용을 알아보려면 도움말을 열고 [돌리기] 블록을 선택하세요.

- 필요한 하드웨어, 엔지니어링 노트북, VEXcode V5를 다운로드하여 준비하세요.
![]() 교사 팁
교사 팁
학생이 VEXcode V5를 처음 사용하는 경우, 탐색하는 동안 언제든지 튜토리얼을 참조할 수 있습니다. 튜토리얼은 도구 모음에 있습니다.

| 수량 | 필요한 재료 |
|---|---|
| 1 |
VEX V5 교실 스타터 키트(최신 펌웨어 포함) |
| 1 |
VEX코드 V5 |
| 1 |
엔지니어링 노트북 |
| 1 |
Clawbot 및 Advanced TrainingBot(드라이브트레인 2모터, 자이로 없음) 예제 프로젝트 |
1단계: 탐사 준비
활동을 시작하기 전에 다음 항목을 모두 준비하셨나요? 다음 각 항목을 확인하세요.
-
모터가 올바른 포트에 연결되어 있습니까?
-
스마트 케이블모든 모터에 완전히되어 있습니까?
-
배터리충전되어 있나요?
![]() 교사 팁
교사 팁
학생들에게 각 문제 해결 단계를 모델로 보여줍니다.
2단계: 새 프로젝트 시작
프로젝트를 시작하기 전에 올바른 템플릿 프로젝트를 선택하세요. Clawbot 및 Advanced TrainingBot(구동 장치 2모터, 자이로 없음) 템플릿 예제 프로젝트에는 Clawbot의 모터 구성이 포함되어 있습니다. 템플릿을 사용하지 않으면 로봇이 프로젝트를 올바르게 실행하지 않습니다.

다음 단계를 완료하세요.
- 파일 메뉴를 엽니다.
- 선택열기예.
- Clawbot 및 Advanced TrainingBot(Drivetrain 2-motor, No Gyro) 템플릿 예제 프로젝트를 선택하여 엽니다.
- 팔을 제어하기 위해 프로그래밍할 것이므로 프로젝트 이름을ArmControl.바꾸세요.
- 프로젝트를저장하세요.
- 도구 모음 중앙 창에 프로젝트 이름 ArmControl이 있는지 확인하세요.

![]() 교사 팁
교사 팁
- 이것은 프로그래밍의 시작 활동이므로 교사는 단계를 모델로 보여준 다음 학생들에게 동일한 동작을 완료하도록 요청해야 합니다. 그런 다음 교사는 학생들이 단계를 올바르게 따르고 있는지 모니터링해야 합니다.
- 학생들이 파일 메뉴에서 예제 열기를 선택했는지 확인하세요.
- 학생들이 Clawbot과 Advanced TrainingBot(Drivetrain 2-motor, No Gyro)템플릿 예제 프로젝트를 선택했는지 확인하세요.
학생들에게 예제페이지에서 선택할 수 있는 항목이 여러 개 있다는을 알려줄 수 있습니다. 학생들이 다른 로봇을 만들고 사용하면서 다양한 템플릿을 사용할 기회를 얻게 됩니다. - 학생들에게 프로젝트 이름에 자신의 이니셜이나 그룹 이름을 추가하도록 요청할 수 있습니다. 학생들에게 프로젝트를 제출하도록 요청할 경우, 프로젝트를 구분하는 데 도움이 됩니다.
![]() 교사 도구 상자
-
프로젝트 저장
교사 도구 상자
-
프로젝트 저장
VEXcode V5를 처음 열었을 때 창에VEXcode Project이라는 라벨이 붙어 있었고 저장되지 않았다는 점(도구 모음에 표시됨)을 지적합니다. VEXcode 프로젝트는 VEXcode V5를 처음 열었을 때 기본 프로젝트 이름입니다. 프로젝트 이름을ArmControl로 바꾸고 저장하자 디스플레이가 저장됨으로 업데이트되었습니다. 도구 모음의 이 창을 사용하면 학생들이 올바른 프로젝트를 사용하고 있는지, 프로젝트가 저장되었는지 쉽게 확인할 수 있습니다.
프로젝트가 처음 저장되면 VEXcode V5는 프로젝트 이름 옆에 있는 메시지에서 알 수 있듯이 이후의 모든 변경 사항을 자동으로 저장합니다.
학생들에게 이제 첫 번째 프로젝트를 시작할 준비가 되었다고 말하세요. 학생들에게 몇 가지 간단한 단계만 따르면 클로봇의 팔을 올리고 내리는 프로젝트를 만들고 실행할 수 있다고 설명하세요.
![]() 교사 도구 상자
-
멈추고 토론하기
교사 도구 상자
-
멈추고 토론하기
여기서 잠시 멈춰서 학생 그룹이 VEXcode V5에서 새 프로젝트를 시작하기 위해 방금 완료한 단계를 검토해 보는 것이 좋습니다.
3단계: 팔을 위로 올리세요
이제 팔을 들어올리는 동작을 프로그래밍해 보겠습니다!
- 프로그래밍 영역의{When started}블록 아래에 [Spin for] 블록을 추가합니다.
- 데모를 보고 싶으시면 VEXcode V5에서 팔 움직이기 튜토리얼을 시청하세요.

- 슬롯아이콘을 클릭하세요. 로봇 브레인의 사용 가능한 슬롯 중 하나에 프로젝트를 다운로드할 수 있습니다. 슬롯 1을 클릭하세요.

- 로봇을 컴퓨터나 태블릿에 연결합니다. 연결이 성공적으로 이루어지면 도구 모음의 Brain 아이콘이 녹색으로 바뀝니다.

- 도구 모음에서다운로드버튼을 클릭하여 Drive 프로젝트를 로봇 브레인에 다운로드합니다.
![]() 교사 도구 상자
-
블록 도움말
교사 도구 상자
-
블록 도움말
-
프로그래밍 영역에는 기본적으로 {When started}블록이 이미 있다는 점을 지적하세요. 모든 프로젝트는 이 블록에서 시작됩니다. 프로젝트가 시작되면 연결된 블록은 배치된 순서대로 따라갑니다.
[회전] 블록을 클릭하고 프로그래밍 영역으로 끌어서{When started}블록에 연결하는 방법을 보여주세요. 부착되면 클릭하는 소리가 들립니다.
-
컴퓨터를 사용하는 경우 학생은 VEX V5 로봇 브레인을USB 케이블사용하여 컴퓨터에 연결해야 합니다. 태블릿을 사용하는 경우, VEX V5 로봇 두뇌를 스마트 라디오를 사용하여 태블릿에 연결해야 합니다.
-
학생들이 컴퓨터를 사용하고 있다면, 지금 로봇 브레인에서 USB 케이블을 분리하라고 요청하세요. 프로젝트를 실행하는 동안 로봇을 컴퓨터에 연결하면 로봇이 연결 케이블을 잡아당길 수 있습니다.

- ArmControl 프로젝트가 선택한 슬롯의 Brain에 다운로드되었는지 확인하세요.
![]() 교사 도구 상자
-
먼저 모델링 옵션
교사 도구 상자
-
먼저 모델링 옵션
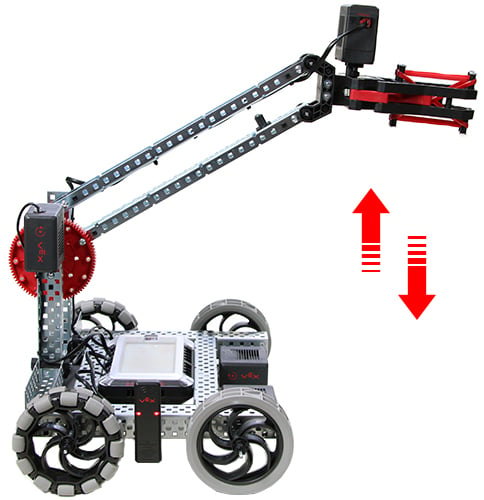
모든 학생이 한꺼번에 시도하기 전에, 먼저 학급 앞에서 프로젝트를 진행하는 모델을 만드세요. 학생들을 한곳에 모으고 클로봇이 팔을 움직일 수 있을 만큼 충분한 공간을 남겨둡니다. 프로젝트를 종료하는 방법과 클로봇의 팔을 원래 위치로 되돌리는 방법을 보여줍니다.
학생들에게 이제 각자 프로젝트를 진행할 차례라고 알려줍니다. 클로봇의 팔을 안전하게 들어 올릴 수 있을 만큼 충분한 공간이 있는지 확인하세요.
- Clawbot에서 프로젝트를하려면 프로젝트가 선택되어 있는지 확인한 다음 실행 버튼을 누릅니다. 첫 번째 Claw Arm 프로젝트를 만든 것을 축하드립니다!
4단계: 다음을 시도해 보세요: 팔을 아래로 프로그래밍하세요
이제 팔을 위로 움직이도록 프로그래밍했으므로, 이제는 팔을 낮추거나 아래로 움직이도록 프로그래밍해야 합니다.

![]()
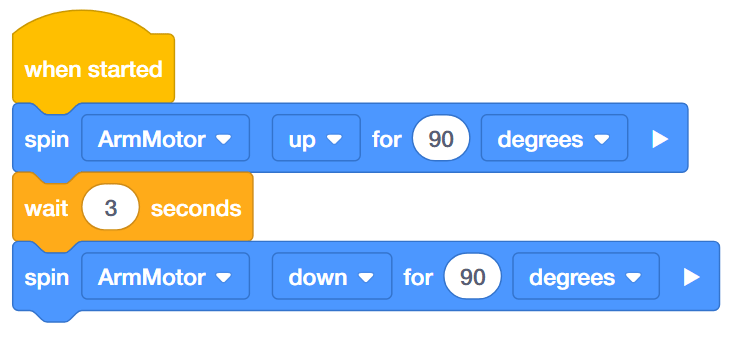
- ArmControl 프로젝트에 [대기] 블록과 두 번째 [회전] 블록을 추가하여 팔이 90도까지 올라가고 3초간 기다린 후 다시 내려오도록 합니다.
힌트:[회전] 블록 내에서 방향을 변경해야 합니다. [대기] 블록에 대한 자세한 내용은 VEXcode V5 도움말 기능을 참조하세요. - 수정된 프로젝트에서 팔을 90도 위로 움직이고, 3초간 기다린 후, ArmControl 프로젝트를에서다운로드하고하여 팔을 90도 아래로 움직이는지 테스트합니다.
- [Wait] 블록이 실행되는 동안 팔이 위치를 유지하는 것을 확인하세요. 모터는 배터리에서 전력을 얻어 중력에 맞서 팔을 들어올립니다. 모터를 멈추는 기본 설정이<Hold>설정이기 때문입니다. 정지를 위한 두 가지 다른 설정은 <Brake>과 <Coast>입니다. 이에 대해서는 다른 연구실에서 배우게 될 겁니다.
![]() 교사 도구 상자
-
솔루션
교사 도구 상자
-
솔루션
이전에는 매개변수를 "위"로 설정하고 "90도"로 [회전] 블록을 사용하여 팔을 위쪽으로 이동했습니다. 이제 학생들은 "3초"로 설정된 [대기] 블록과 "아래로"로 설정된 두 번째 [회전] 블록을 추가해야 합니다. 팔이 원래 위치로 돌아가려면 90도의 매개변수를 변경할 필요가 없습니다.
[대기] 블록이 실행되는 동안 팔은 위치를 유지합니다. 왜냐하면 "대기"는 V5 스마트 모터의 기본 정지 유형이기 때문입니다. 정지 유형을 제동이나 관성으로 설정하면 팔이 무게와 중력으로 인해 아래쪽으로 떨어지기 시작한다는 점에 유의하는 것이 중요합니다.
5단계: 비행 교통 관제사 챌린지 완료
![]() 비행 교통 관제사 챌린지에서 클로봇은 팔을 90도씩 위아래로 움직여야 하고, 3초간 기다린 다음, 팔을 45도씩 두 번씩 위아래로 움직이고, 5초간 기다린 다음, 팔을 90도씩 세 번 위아래로 움직여야 합니다.
비행 교통 관제사 챌린지에서 클로봇은 팔을 90도씩 위아래로 움직여야 하고, 3초간 기다린 다음, 팔을 45도씩 두 번씩 위아래로 움직이고, 5초간 기다린 다음, 팔을 90도씩 세 번 위아래로 움직여야 합니다.
클로봇의 동작 목록은 다음과 같습니다.
- 팔을 위로, 그리고 아래로 90도 각도로 움직입니다.
- 3초간 기다리세요.
- 팔을 위로, 그리고 아래로 45도 움직입니다.
- 팔을 위로, 그리고 아래로 45도 움직입니다.
- 5초간 기다리세요.
- 팔을 위로, 그리고 아래로 90도 각도로 움직입니다.
- 팔을 위로, 그리고 아래로 90도 각도로 움직입니다.
- 팔을 위로, 그리고 아래로 90도 각도로 움직입니다.
![]() 교사 도구 상자
-
솔루션
교사 도구 상자
-
솔루션
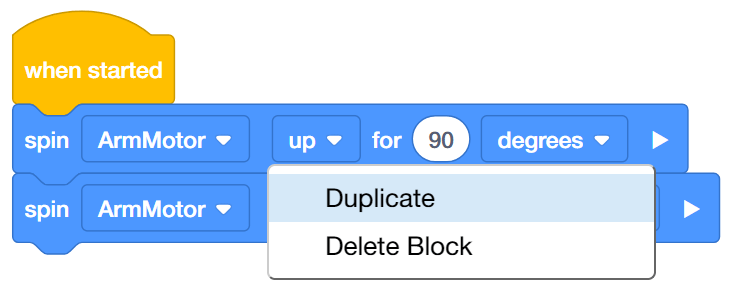
이 챌린지의 대부분의 블록은 [돌려서] 블록입니다. 팔을 위로 움직이는 [회전] 블록과 팔을 아래로 움직이는 [회전] 블록을 추가한 후, 첫 번째 [회전] 블록을 마우스 오른쪽 버튼으로 클릭하거나 길게 클릭하고 복제를 선택하여 세 번째와 네 번째 [회전] 블록을 추가하는 식으로 계속 추가할 수 있습니다. 이 챌린지에는 총 12개의 블록이 필요합니다. 그런 다음 매개변수를 변경하여 과제를 충족할 수 있으며 [대기] 블록을 [회전] 블록 사이에 추가할 수 있습니다.