
![]() โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
-
การสำรวจนี้จะแนะนำให้นักเรียนได้รู้จักกับการเขียนโปรแกรมพื้นฐานของ Arm Motor ของ V5 Clawbot
-
การเรียนรู้การตั้งโปรแกรม Arm Motor ช่วยให้นักเรียนสามารถควบคุมการเคลื่อนไหวแขนของ V5 Clawbot ได้อย่างถูกต้อง สำหรับข้อมูลเพิ่มเติมเกี่ยวกับบล็อคที่ใช้ โปรดไปที่ ข้อมูลวิธีใช้
V5 Clawbot พร้อมที่จะเข้าถึงแล้ว!
การสำรวจนี้จะมอบเครื่องมือที่จะช่วยให้คุณเริ่มสร้างโปรเจ็กต์เจ๋งๆ ที่ใช้แขนของ V5 Clawbot ได้
- VEXcode V5 ที่จะใช้ในการสำรวจนี้ ได้แก่:

- หากต้องการดูข้อมูลเพิ่มเติมเกี่ยวกับบล็อก ให้เปิดวิธีใช้ จากนั้นเลือกบล็อก [หมุนสำหรับ]

- ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น สมุดบันทึกวิศวกรรม และ VEXcode V5 ที่ดาวน์โหลดและพร้อมใช้งานแล้ว
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
หากนี่เป็นครั้งแรกที่นักเรียนใช้ VEXcode V5 พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาในระหว่างการสำรวจครั้งนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ

| ปริมาณ | วัสดุที่ต้องใช้ |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (พร้อมเฟิร์มแวร์ล่าสุด) |
| 1 |
รหัส VEX V5 |
| 1 |
สมุดบันทึกวิศวกรรม |
| 1 |
โครงการตัวอย่าง Clawbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) |
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
จำลองขั้นตอนการแก้ไขปัญหาแต่ละขั้นตอนให้กับนักเรียน
ขั้นตอนที่ 2: เริ่มโครงการใหม่
ก่อนที่คุณจะเริ่มต้นโครงการของคุณ โปรดเลือกโครงการเทมเพลตที่ถูกต้อง ตัวอย่างโปรเจ็กต์เทมเพลต Clawbot (Drivetrain 2 มอเตอร์, ไม่มีไจโร) ประกอบไปด้วยการกำหนดค่ามอเตอร์ของ Clawbot หากไม่ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถรันโครงการได้อย่างถูกต้อง
ดำเนินการตามขั้นตอนต่อไปนี้:
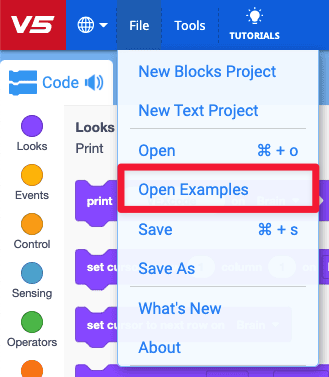
- เปิดเมนูไฟล์
- เลือก เปิด ตัวอย่าง.
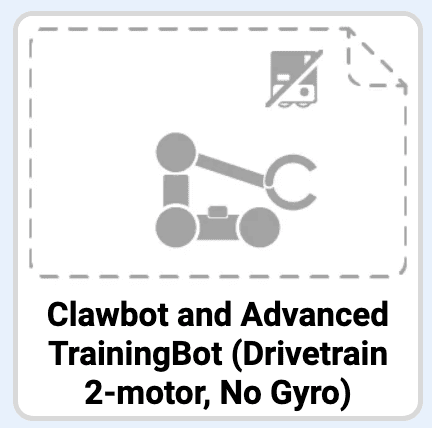
- เลือกและเปิดโครงการตัวอย่างเทมเพลต Clawbot (Drivetrain 2-motor, No Gyro)
- เนื่องจากเราจะเขียนโปรแกรมเพื่อควบคุมแขน ให้เปลี่ยนชื่อโปรเจ็กต์ของคุณเป็น ArmControl.
- บันทึก โครงการของคุณ
- ตรวจสอบให้แน่ใจว่าชื่อโครงการ ArmControl อยู่ในหน้าต่างตรงกลางแถบเครื่องมือแล้ว
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
เนื่องจากนี่เป็นกิจกรรมเริ่มต้นในการเขียนโปรแกรม ครูควรสร้างแบบจำลองขั้นตอน จากนั้นจึงขอให้นักเรียนทำตามขั้นตอนเดียวกัน จากนั้นครูควรติดตามนักเรียนเพื่อให้แน่ใจว่านักเรียนปฏิบัติตามขั้นตอนอย่างถูกต้อง
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือก เปิดตัวอย่าง จากเมนูไฟล์
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโครงการตัวอย่างเทมเพลต Clawbot (Drivetrain 2-motor, No Gyro)
คุณสามารถชี้ให้ผู้เรียนทราบว่ามีตัวเลือกหลายตัวให้เลือกในหน้า ตัวอย่าง เมื่อพวกเขาสร้างและใช้หุ่นยนต์ตัวอื่น พวกเขาจะมีโอกาสใช้เทมเพลตที่แตกต่างกัน
-
คุณสามารถขอให้เด็กนักเรียนเพิ่มอักษรย่อของตนเองหรือชื่อกลุ่มลงในชื่อโครงการได้ สิ่งนี้จะช่วยแยกแยะโครงการต่างๆ ออกจากกัน หากคุณขอให้นักศึกษาส่งโครงการเหล่านั้น
![]() กล่องเครื่องมือสำหรับครู
-
การบันทึกโครงการ
กล่องเครื่องมือสำหรับครู
-
การบันทึกโครงการ
ชี้ให้เห็นว่าเมื่อเปิด VEXcode V5 ครั้งแรก หน้าต่างนั้นมีป้ายกำกับว่า VEXcode Project และไม่ได้รับการบันทึก (ระบุไว้บนแถบเครื่องมือ) โครงการ VEXcode เป็นชื่อโครงการเริ่มต้นเมื่อเปิด VEXcode V5 ครั้งแรก เมื่อเปลี่ยนชื่อโครงการเป็น ArmControl และบันทึกแล้ว การแสดงผลจะได้รับการอัปเดตเป็นบันทึก การใช้หน้าต่างนี้ในแถบเครื่องมือ สามารถตรวจสอบได้อย่างง่ายดายว่านักเรียนกำลังใช้โครงการที่ถูกต้องและบันทึกไว้หรือไม่
เมื่อบันทึกโครงการในครั้งแรกแล้ว VEXcode V5 จะบันทึกการเปลี่ยนแปลงที่เกิดขึ้นตามมาโดยอัตโนมัติ ดังที่ระบุโดยข้อความถัดจากชื่อโครงการ
บอกนักเรียนว่าตอนนี้พวกเขาพร้อมที่จะเริ่มโครงการแรกแล้ว อธิบายแก่เด็กนักเรียนว่าเพียงทำตามขั้นตอนง่ายๆ ไม่กี่ขั้นตอน พวกเขาก็สามารถสร้างและรันโปรเจ็กต์ที่จะยกและลดแขนของ Clawbot ได้
![]() กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
นี่เป็นจุดที่ดีที่จะหยุดชั่วคราวและให้กลุ่มนักศึกษาทบทวนขั้นตอนที่เพิ่งเสร็จสิ้นในการเริ่มโปรเจ็กต์ใหม่ใน VEXcode V5
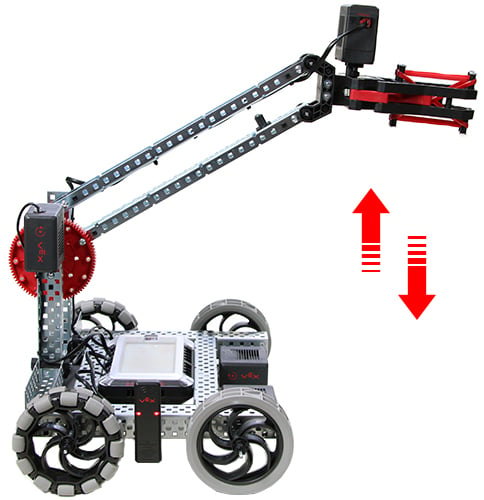
ขั้นตอนที่ 3: ขยับแขนขึ้น
ต่อไปเราจะเริ่มต้นด้วยการตั้งโปรแกรมแขนให้ยกขึ้น!
- เพิ่มบล็อก [หมุนสำหรับ] ด้านล่างบล็อก {When started} ในพื้นที่การเขียนโปรแกรม
- ชมการสอนการเคลื่อนแขนใน VEXcode V5 หากคุณต้องการดูการสาธิต

- คลิกไอคอน ช่อง คุณสามารถดาวน์โหลดโครงการของคุณไปยังหนึ่งในสล็อตที่พร้อมใช้งานใน Robot Brain ได้ คลิกที่ช่องที่ 1

- เชื่อมต่อหุ่นยนต์กับคอมพิวเตอร์หรือแท็บเล็ตของคุณ ไอคอนสมองบนแถบเครื่องมือจะเปลี่ยนเป็นสีเขียวหลังจากเชื่อมต่อสำเร็จ

- คลิกปุ่ม ดาวน์โหลด บนแถบเครื่องมือเพื่อดาวน์โหลดโครงการ Drive ไปยัง Robot Brain
![]() กล่องเครื่องมือสำหรับครู
-
ช่วยเหลือเกี่ยวกับบล็อค
กล่องเครื่องมือสำหรับครู
-
ช่วยเหลือเกี่ยวกับบล็อค
-
ชี้ให้ทราบว่าในพื้นที่การเขียนโปรแกรมมีบล็อก {When started} อยู่แล้วโดยค่าเริ่มต้น ทุกโครงการจะเริ่มต้นด้วยบล็อคนี้ เมื่อเริ่มต้นโครงการ บล็อกที่เชื่อมต่อจะถูกติดตามตามลำดับที่วางไว้
สาธิตการคลิกบนบล็อก [หมุนสำหรับ] และลากไปยังพื้นที่การเขียนโปรแกรม โดยเชื่อมต่อกับบล็อก {When started} คุณจะได้ยินเสียงคลิกเมื่อติดตั้ง
-
หากคุณใช้คอมพิวเตอร์ นักเรียนควรเชื่อมต่อ VEX V5 Robot Brain เข้ากับคอมพิวเตอร์โดยใช้สาย USB หากคุณใช้แท็บเล็ต ควรเชื่อมต่อ VEX V5 Robot Brain เข้ากับแท็บเล็ตโดยใช้ Smart Radio
-
หากนักเรียนกำลังใช้คอมพิวเตอร์ ให้พวกเขาถอดสาย USB ออกจาก Robot Brain ทันที การเชื่อมต่อหุ่นยนต์เข้ากับคอมพิวเตอร์ขณะกำลังรันโครงการอาจทำให้หุ่นยนต์ดึงสายเคเบิลเชื่อมต่อได้

- ตรวจสอบว่าโครงการ ArmControl ได้ดาวน์โหลดไปยังสมองในสล็อตที่คุณเลือกแล้ว
![]() กล่องเครื่องมือสำหรับครู
-
ตัวเลือกในการสร้างแบบจำลองก่อน
กล่องเครื่องมือสำหรับครู
-
ตัวเลือกในการสร้างแบบจำลองก่อน
จำลองการรันโครงการหน้าชั้นเรียนก่อนที่นักเรียนทุกคนจะลองทำพร้อมกัน รวบรวมนักเรียนไว้ในพื้นที่หนึ่งและเว้นพื้นที่ไว้พอให้ Clawbot ขยับแขนได้ สาธิตวิธีการยุติโครงการและให้แขนของ Clawbot กลับสู่ตำแหน่งพัก
บอกนักเรียนว่าตอนนี้ถึงตาพวกเขาที่จะดำเนินโครงการของพวกเขาแล้ว ตรวจสอบให้แน่ใจว่ามีช่องว่างเพียงพอที่จะยกแขนของ Clawbot ได้อย่างปลอดภัย
- รันโครงการ บน Clawbot โดยตรวจสอบให้แน่ใจว่าได้เลือกโครงการแล้ว จากนั้นกดปุ่ม Run ขอแสดงความยินดีกับการสร้างโครงการ Claw Arm แรกของคุณ!
ขั้นตอนที่ 4: ลองสิ่งนี้: ตั้งโปรแกรมให้แขนลง
ตอนนี้คุณได้ตั้งโปรแกรมแขนให้เคลื่อนขึ้นแล้ว คุณจะตั้งโปรแกรมแขนให้เคลื่อนลงหรือเคลื่อนลงก็ได้

![]()
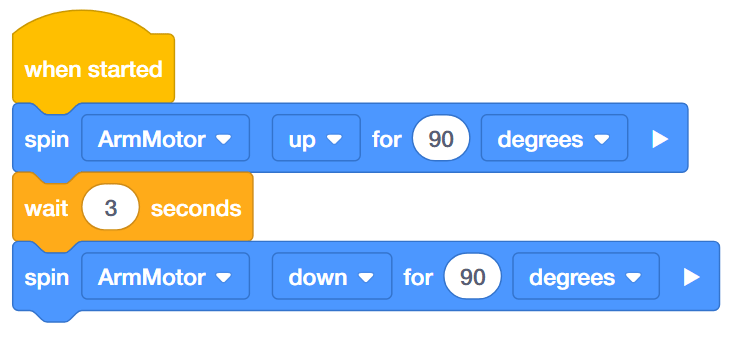
- เพิ่มบล็อก [Wait] และบล็อก [Spin for] ที่สอง ลงในโปรเจ็กต์ ArmControl ของคุณ เพื่อให้แขนยกขึ้นเป็น 90 องศา รอ 3 วินาที แล้วกลับลงมา
คำแนะนำ: คุณจะต้องเปลี่ยนทิศทางภายในบล็อก [Spin for] สำหรับข้อมูลเพิ่มเติมเกี่ยวกับบล็อก [Wait] โปรดดูคุณลักษณะวิธีใช้ VEXcode V5 - ทดสอบว่าโปรเจ็กต์ที่แก้ไขของคุณขยับแขนขึ้น 90 องศา รอสามวินาที แล้วจึงขยับแขนลง 90 องศาโดยดาวน์โหลด และ รัน โปรเจ็กต์ ArmControl ของคุณ
- สังเกตว่าแขนจะยึดตำแหน่งไว้ในขณะที่บล็อก [Wait] กำลังทำงาน มอเตอร์ดึงพลังงานจากแบตเตอรี่เพื่อยึดแขนให้ต้านแรงโน้มถ่วง นั่นเป็นเพราะการตั้งค่าเริ่มต้นสำหรับการหยุดมอเตอร์คือ <Hold> มีการตั้งค่าอื่นอีกสองแบบสำหรับการหยุด - <Brake> และ <Coast> คุณจะได้เรียนรู้เกี่ยวกับสิ่งเหล่านี้ในห้องแล็ปอื่น
![]() กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
ก่อนหน้านี้แขนจะเคลื่อนขึ้นโดยใช้บล็อก [Spin for] โดยมีพารามิเตอร์ที่ตั้งเป็น "ขึ้น" และ "90 องศา" ตอนนี้ นักเรียนควรเพิ่มชุดบล็อก [รอ] เป็น "3 วินาที" และชุดบล็อกที่สอง [หมุนเป็นเวลา] เป็น "ลง" ไม่จำเป็นต้องเปลี่ยนพารามิเตอร์ 90 องศาเพื่อให้แขนกลับสู่ตำแหน่งเดิม
ในขณะที่บล็อก [รอ] กำลังทำงาน แขนจะคงตำแหน่งไว้เนื่องจาก "Hold" คือประเภทการหยุดเริ่มต้นของ V5 Smart Motor สิ่งสำคัญที่ต้องทราบคือ หากตั้งค่าประเภทการหยุดเป็นเบรกหรือไหลตาม น้ำจะค่อยๆ ตกลงมาด้านล่างเนื่องจากน้ำหนักและแรงโน้มถ่วงของโลก
ขั้นตอนที่ 5: ทำภารกิจควบคุมการจราจรทางอากาศให้สำเร็จ
![]() ในการท้าทาย Flight Traffic Controller Challenge Clawbot จะต้องขยับแขนขึ้นและลงครั้งละ 90 องศา รอ 3 วินาที ขยับแขนขึ้นและลงครั้งละ 45 องศา 2 ครั้ง รอ 5 วินาที จากนั้นจึงขยับแขนขึ้นและลงสามครั้งเป็นเวลา 90 องศา
ในการท้าทาย Flight Traffic Controller Challenge Clawbot จะต้องขยับแขนขึ้นและลงครั้งละ 90 องศา รอ 3 วินาที ขยับแขนขึ้นและลงครั้งละ 45 องศา 2 ครั้ง รอ 5 วินาที จากนั้นจึงขยับแขนขึ้นและลงสามครั้งเป็นเวลา 90 องศา
นี่คือรายการพฤติกรรมของ Clawbot:
- เคลื่อนแขนขึ้นแล้วลง 90 องศา
- รอ 3 วินาที
- เคลื่อนแขนขึ้นแล้วลง 45 องศา
- เคลื่อนแขนขึ้นแล้วลง 45 องศา
- รอ 5 วินาที
- เคลื่อนแขนขึ้นแล้วลง 90 องศา
- เคลื่อนแขนขึ้นแล้วลง 90 องศา
- เคลื่อนแขนขึ้นแล้วลง 90 องศา
![]() กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
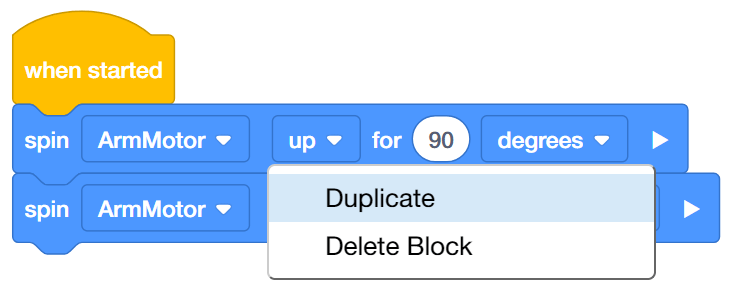
บล็อกส่วนใหญ่ในความท้าทายนี้คือ [หมุนเพื่อ] บล็อก หลังจากเพิ่มบล็อก [หมุนสำหรับ] เพื่อเคลื่อนแขนขึ้นและอีกบล็อกหนึ่งเพื่อเคลื่อนแขนลง คุณสามารถคลิกขวาหรือคลิกยาวบนบล็อก [หมุนสำหรับ] แรกแล้วเลือกทำซ้ำเพื่อเพิ่มบล็อก [หมุนสำหรับ] อันที่สามและที่สี่ และเป็นเช่นนี้ต่อไป โดยรวมแล้ว ต้องใช้ 12 [หมุนเพื่อ] บล็อกสำหรับความท้าทายนี้ จากนั้นสามารถเปลี่ยนพารามิเตอร์เพื่อรับมือกับความท้าทาย และสามารถเพิ่มบล็อก [รอ] ระหว่างบล็อก [หมุนสำหรับ] ได้
- ตัวอย่างการตรวจสอบ ความท้าทายของ Flight Traffic Controller โซลูชัน (Google Doc / .docx / .pdf )
- การให้คะแนนการเขียนโปรแกรม (Google Doc / .docx / .pdf )