
റോബോട്ട് ആം പ്രോഗ്രാമിംഗ് - ബ്ലോക്കുകൾ അടിസ്ഥാനമാക്കിയുള്ളത്
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
-
ഈ പര്യവേഷണം വിദ്യാർത്ഥികളെ V5 ക്ലോബോട്ടിന്റെ ആം മോട്ടോറിന്റെ അടിസ്ഥാന പ്രോഗ്രാമിംഗിലേക്ക് പരിചയപ്പെടുത്തും.
-
ആം മോട്ടോർ പ്രോഗ്രാം ചെയ്യാൻ പഠിക്കുന്നത് വിദ്യാർത്ഥികളെ V5 ക്ലോബോട്ടിന്റെ കൈ ചലനങ്ങൾ ശരിയായി നിയന്ത്രിക്കാൻ പ്രാപ്തരാക്കുന്നു. ഉപയോഗിക്കുന്ന ബ്ലോക്കുകളെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്,സഹായ വിവരങ്ങൾസന്ദർശിക്കുക.
V5 Clawbot എത്താൻ തയ്യാറാണ്!
V5 ക്ലോബോട്ടിന്റെ കൈ ഉപയോഗിച്ച് ചില രസകരമായ പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ തുടങ്ങുന്നതിനുള്ള ഉപകരണങ്ങൾ ഈ പര്യവേക്ഷണം നിങ്ങൾക്ക് നൽകും.
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5-ൽ ഇവ ഉൾപ്പെടുന്നു:

- ബ്ലോക്കിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾ കണ്ടെത്താൻ, സഹായം തുറന്ന് [Spin for] ബ്ലോക്ക് തിരഞ്ഞെടുക്കുക.

- ആവശ്യമായ ഹാർഡ്വെയർ, എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക്, VEXcode V5 എന്നിവ ഡൗൺലോഡ് ചെയ്ത് തയ്യാറായിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥി ആദ്യമായി VEXcode V5 ഉപയോഗിക്കുകയാണെങ്കിൽ, ഈ പര്യവേക്ഷണ വേളയിൽ ഏത് സമയത്തും അവർക്ക് ട്യൂട്ടോറിയലുകൾ റഫർ ചെയ്യാൻ കഴിയും. ട്യൂട്ടോറിയലുകൾ ടൂൾബാറിൽ സ്ഥിതിചെയ്യുന്നു.

| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
VEX V5 ക്ലാസ്റൂം സ്റ്റാർട്ടർ കിറ്റ് (കാലികമായ ഫേംവെയറോടുകൂടി) |
| 1 |
VEXcode V5 |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
| 1 |
ക്ലോബോട്ട്, അഡ്വാൻസ്ഡ് ട്രെയിനിംഗ് ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ഉദാഹരണ പ്രോജക്റ്റ് |
ഘട്ടം 1: പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ്, ഈ ഇനങ്ങൾ ഓരോന്നും നിങ്ങളുടെ കൈവശം തയ്യാറായിട്ടുണ്ടോ? ഇനിപ്പറയുന്നവയിൽ ഓരോന്നും പരിശോധിക്കുക:
-
മോട്ടോറുകൾ ശരിയായ പോർട്ടുകളിൽ പ്ലഗ് ചെയ്തിട്ടുണ്ടോ?
-
എല്ലാ മോട്ടോറുകളിലും സ്മാർട്ട് കേബിളുകൾപൂർണ്ണമായുംചേർത്തിട്ടുണ്ടോ?
-
ബാറ്ററിചാർജ്ജ്ആണോ?
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥികൾക്കായി ഓരോ പ്രശ്നപരിഹാര ഘട്ടങ്ങളും മാതൃകയാക്കുക.
ഘട്ടം 2: ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുക
നിങ്ങളുടെ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിന് മുമ്പ്, ശരിയായ ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക. Clawbot ഉം Advanced TrainingBot ഉം (Drivetrain 2-motor, No Gyro) ടെംപ്ലേറ്റ് ഉദാഹരണ പ്രോജക്റ്റിൽ Clawbot ന്റെ മോട്ടോറുകളുടെ കോൺഫിഗറേഷൻ അടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.

ഇനിപ്പറയുന്ന ഘട്ടങ്ങൾ പൂർത്തിയാക്കുക:
- ഫയൽ മെനു തുറക്കുക.
- തിരഞ്ഞെടുക്കുകതുറക്കുകഉദാഹരണങ്ങൾ.
- Clawbot ഉം Advanced TrainingBot ഉം (Drivetrain 2-motor, No Gyro) ടെംപ്ലേറ്റ് ഉദാഹരണ പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് തുറക്കുക.
- നമ്മൾ ആം നിയന്ത്രിക്കാൻ പ്രോഗ്രാം ചെയ്യുന്നതിനാൽ, നിങ്ങളുടെ പ്രോജക്റ്റ്ആംകൺട്രോൾഎന്ന് പുനർനാമകരണം ചെയ്യുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ്സംരക്ഷിക്കുക.
- ടൂൾബാറിന്റെ മധ്യഭാഗത്തുള്ള വിൻഡോയിൽ ഇപ്പോൾ ArmControl എന്ന പ്രോജക്റ്റ് നാമം ഉണ്ടെന്ന് ഉറപ്പാക്കുക.

![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
- ഇത് പ്രോഗ്രാമിംഗോടുകൂടിയ ഒരു ആരംഭ പ്രവർത്തനമായതിനാൽ, അധ്യാപകൻ ഘട്ടങ്ങൾ മാതൃകയാക്കണം, തുടർന്ന് വിദ്യാർത്ഥികളോട് അതേ പ്രവർത്തനങ്ങൾ പൂർത്തിയാക്കാൻ ആവശ്യപ്പെടണം. തുടർന്ന് അധ്യാപകൻ വിദ്യാർത്ഥികൾ ഘട്ടങ്ങൾ ശരിയായി പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ അവരെ നിരീക്ഷിക്കണം.
- ഫയൽ മെനുവിൽ നിന്ന് വിദ്യാർത്ഥികൾ 'ഓപ്പൺ ഉദാഹരണങ്ങൾ' തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
- വിദ്യാർത്ഥികൾ Clawbot ഉം Advanced TrainingBot ഉം (Drivetrain 2-motor, No Gyro) തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുകടെംപ്ലേറ്റ് ഉദാഹരണ പ്രോജക്റ്റ്.
ഉദാഹരണങ്ങൾപേജിൽ നിന്ന് തിരഞ്ഞെടുക്കാൻ നിരവധി തിരഞ്ഞെടുപ്പുകൾ ഉണ്ടെന്ന് നിങ്ങൾക്ക് വിദ്യാർത്ഥികളെ ചൂണ്ടിക്കാണിക്കാം. അവർ മറ്റ് റോബോട്ടുകൾ നിർമ്മിക്കുകയും ഉപയോഗിക്കുകയും ചെയ്യുമ്പോൾ, അവർക്ക് വ്യത്യസ്ത ടെംപ്ലേറ്റുകൾ ഉപയോഗിക്കാനുള്ള അവസരം ലഭിക്കും. - പ്രോജക്റ്റ് നാമത്തിൽ വിദ്യാർത്ഥികളോട് അവരുടെ ഇനീഷ്യലുകളോ ഗ്രൂപ്പിന്റെ പേരോ ചേർക്കാൻ ആവശ്യപ്പെടാം. വിദ്യാർത്ഥികളോട് പ്രോജക്ടുകൾ സമർപ്പിക്കാൻ ആവശ്യപ്പെടുകയാണെങ്കിൽ, അവ വ്യത്യസ്തമാക്കാൻ ഇത് സഹായിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
ടീച്ചർ ടൂൾബോക്സ്
-
സേവിംഗ് പ്രോജക്റ്റുകൾ
അവർ ആദ്യം VEXcode V5 തുറന്നപ്പോൾ, വിൻഡോVEXcode Projectഎന്ന് ലേബൽ ചെയ്തിരുന്നുവെന്നും അത് സേവ് ചെയ്തിട്ടില്ലെന്നും (ടൂൾബാറിൽ സൂചിപ്പിച്ചിരിക്കുന്നു) ചൂണ്ടിക്കാണിക്കുക. VEXcode V5 ആദ്യമായി തുറക്കുമ്പോൾ, VEXcode Project എന്നത് ഡിഫോൾട്ട് പ്രോജക്റ്റ് നാമമാണ്. പ്രോജക്റ്റ്ArmControlഎന്ന് പുനർനാമകരണം ചെയ്ത് സേവ് ചെയ്തുകഴിഞ്ഞാൽ, ഡിസ്പ്ലേ സേവ്ഡ് ആയി അപ്ഡേറ്റ് ചെയ്തു. ടൂൾബാറിലെ ഈ വിൻഡോ ഉപയോഗിച്ച്, വിദ്യാർത്ഥികൾ ശരിയായ പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നുണ്ടോ എന്നും അത് സേവ് ചെയ്തിട്ടുണ്ടോ എന്നും പരിശോധിക്കാൻ എളുപ്പമാണ്.
ഒരു പ്രോജക്റ്റ് പ്രാരംഭമായി സേവ് ചെയ്തുകഴിഞ്ഞാൽ, പ്രോജക്റ്റ് പേരിന് അടുത്തുള്ള സന്ദേശം സൂചിപ്പിക്കുന്നത് പോലെ, തുടർന്നുള്ള എല്ലാ മാറ്റങ്ങളും VEXcode V5 ഓട്ടോസേവ് ചെയ്യുന്നു.
വിദ്യാർത്ഥികളോട് അവരുടെ ആദ്യ പ്രോജക്റ്റ് ആരംഭിക്കാൻ തയ്യാറാണെന്ന് പറയുക. കുറച്ച് ലളിതമായ ഘട്ടങ്ങൾ പാലിച്ചുകൊണ്ട്, ക്ലോബോട്ടിന്റെ കൈ ഉയർത്താനും താഴ്ത്താനും കഴിയുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കാനും പ്രവർത്തിപ്പിക്കാനും അവർക്ക് കഴിയുമെന്ന് വിദ്യാർത്ഥികളോട് വിശദീകരിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
VEXcode V5-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിനുള്ള ഘട്ടങ്ങൾ വിദ്യാർത്ഥി ഗ്രൂപ്പുകളുമായി അവലോകനം ചെയ്യാൻ ഇത് ഒരു നല്ല പോയിന്റാണ്.
ഘട്ടം 3: കൈ മുകളിലേക്ക് നീക്കുക
ഇനി നമ്മൾ ഉയർത്തേണ്ട കൈ പ്രോഗ്രാം ചെയ്തുകൊണ്ട് ആരംഭിക്കാൻ പോകുന്നു!
- പ്രോഗ്രാമിംഗ് ഏരിയയിൽ{When started}ബ്ലോക്കിന് താഴെയുള്ള [Spin for] ബ്ലോക്ക് ചേർക്കുക.
- നിങ്ങൾക്ക് ഒരു ഡെമോൺസ്ട്രേഷൻ വേണമെങ്കിൽ VEXcode V5-ലെ മൂവിംഗ് ദി ആം ട്യൂട്ടോറിയൽ കാണുക.

- സ്ലോട്ട്ഐക്കണിൽ ക്ലിക്ക് ചെയ്യുക. റോബോട്ട് ബ്രെയിനിലെ ലഭ്യമായ സ്ലോട്ടുകളിലൊന്നിലേക്ക് നിങ്ങളുടെ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാം. സ്ലോട്ട് 1 ൽ ക്ലിക്ക് ചെയ്യുക.

- റോബോട്ട് നിങ്ങളുടെ കമ്പ്യൂട്ടറിലേക്കോ ടാബ്ലെറ്റിലേക്കോ ബന്ധിപ്പിക്കുക. വിജയകരമായ ഒരു കണക്ഷൻ ഉണ്ടാക്കിയ ശേഷം ടൂൾബാറിലെ ബ്രെയിൻ ഐക്കൺ പച്ചയായി മാറുന്നു.

- റോബോട്ട് ബ്രെയിനിലേക്ക് ഡ്രൈവ് പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാൻ ടൂൾബാറിലെഡൗൺലോഡ്ബട്ടൺ ക്ലിക്ക് ചെയ്യുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ബ്ലോക്കുകൾക്കുള്ള സഹായം
ടീച്ചർ ടൂൾബോക്സ്
-
ബ്ലോക്കുകൾക്കുള്ള സഹായം
-
പ്രോഗ്രാമിംഗ് ഏരിയയിൽ, സ്ഥിരസ്ഥിതിയായി ഇതിനകം തന്നെ ഒരു {When started}ബ്ലോക്ക് ഉണ്ടെന്ന് ചൂണ്ടിക്കാണിക്കുക. എല്ലാ പദ്ധതികളും ഈ ബ്ലോക്കിൽ നിന്നാണ് ആരംഭിക്കുന്നത്. പദ്ധതി ആരംഭിക്കുമ്പോൾ, ബന്ധിപ്പിച്ച ബ്ലോക്കുകൾ അവ സ്ഥാപിച്ചിരിക്കുന്ന ക്രമത്തിൽ പിന്തുടരും.
[Spin for] ബ്ലോക്കിൽ ക്ലിക്ക് ചെയ്ത് പ്രോഗ്രാമിംഗ് ഏരിയയിലേക്ക് വലിച്ചിട്ട്, അതിനെ{When started}ബ്ലോക്കിലേക്ക് ബന്ധിപ്പിക്കുന്നത് പ്രദർശിപ്പിക്കുക. അത് അറ്റാച്ച് ചെയ്യുമ്പോൾ ഒരു ക്ലിക്ക് കേൾക്കും.
-
നിങ്ങൾ ഒരു കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, വിദ്യാർത്ഥിയുടെ VEX V5 റോബോട്ട് ബ്രെയിൻUSB കേബിൾഉപയോഗിച്ച് കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കണം. നിങ്ങൾ ഒരു ടാബ്ലെറ്റ് ഉപയോഗിക്കുകയാണെങ്കിൽ, സ്മാർട്ട് റേഡിയോ ഉപയോഗിച്ച് VEX V5 റോബോട്ട് ബ്രെയിൻ ടാബ്ലെറ്റുമായി ബന്ധിപ്പിക്കണം.
-
വിദ്യാർത്ഥികൾ കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരോട് ഇപ്പോൾ ആവശ്യപ്പെടുക. ഒരു പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ റോബോട്ട് ഒരു കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നത് റോബോട്ട് കണക്ഷൻ കേബിളിൽ വലിക്കാൻ ഇടയാക്കും.

- നിങ്ങൾ തിരഞ്ഞെടുത്ത സ്ലോട്ടിലെ തലച്ചോറിലേക്ക് ആംകൺട്രോൾ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടോയെന്ന് പരിശോധിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ആദ്യം മോഡൽ ചെയ്യാനുള്ള ഓപ്ഷൻ
ടീച്ചർ ടൂൾബോക്സ്
-
ആദ്യം മോഡൽ ചെയ്യാനുള്ള ഓപ്ഷൻ
എല്ലാ വിദ്യാർത്ഥികളെയും ഒരുമിച്ച് പരീക്ഷിക്കുന്നതിന് മുമ്പ്, ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് മാതൃകയായി നടപ്പിലാക്കുക. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടി ക്ലോബോട്ടിന് കൈ ചലിപ്പിക്കാൻ മതിയായ ഇടം നൽകുക. പ്രോജക്റ്റ് എങ്ങനെ അവസാനിപ്പിക്കാമെന്നും ക്ലോബോട്ടിന്റെ കൈ പിന്നിലേക്ക് താഴ്ത്തി വിശ്രമിക്കുന്ന സ്ഥാനത്ത് എങ്ങനെ വയ്ക്കാമെന്നും പ്രദർശിപ്പിക്കുക.
വിദ്യാർത്ഥികളോട് ഇപ്പോൾ അവരുടെ പ്രോജക്റ്റുകൾ നടത്താനുള്ള ഊഴമാണെന്ന് പറയുക. ക്ലോബോട്ടിന്റെ കൈ സുരക്ഷിതമായി ഉയർത്താൻ അവർക്ക് മതിയായ ഇടമുണ്ടെന്ന് ഉറപ്പാക്കുക.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തുവെന്ന് ഉറപ്പാക്കി Clawbot-ൽ പ്രോജക്റ്റ്പ്രവർത്തിപ്പിക്കുക, തുടർന്ന് Run ബട്ടൺ അമർത്തുക. നിങ്ങളുടെ ആദ്യത്തെ ക്ലോ ആം പ്രോജക്റ്റ് സൃഷ്ടിച്ചതിന് അഭിനന്ദനങ്ങൾ!
ഘട്ടം 4: ഇത് പരീക്ഷിച്ചുനോക്കൂ: കൈ താഴേക്ക് പ്രോഗ്രാം ചെയ്യുക
ഇപ്പോൾ നിങ്ങൾ ഭുജം മുകളിലേക്ക് നീക്കാൻ പ്രോഗ്രാം ചെയ്തുകഴിഞ്ഞാൽ, ഇനി നിങ്ങൾ ഭുജം താഴ്ത്താനോ താഴേക്കോ നീക്കാൻ പ്രോഗ്രാം ചെയ്യും.

![]()
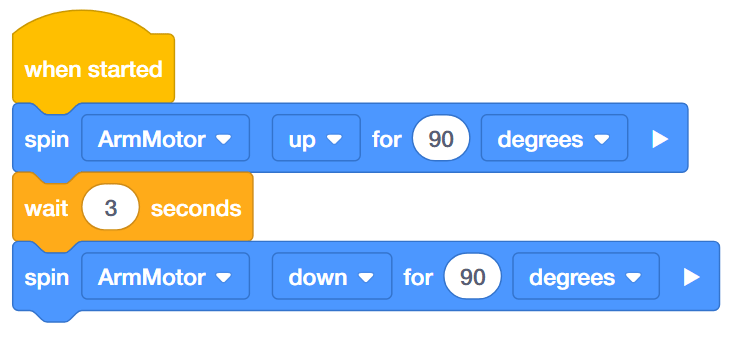
- നിങ്ങളുടെ ആംകൺട്രോൾ പ്രോജക്റ്റിലേക്ക് ഒരു [വെയിറ്റ്] ബ്ലോക്കും ഒരു സെക്കൻഡ് [സ്പിൻ ഫോർ] ബ്ലോക്കും ചേർക്കുക, അതുവഴി കൈ 90 ഡിഗ്രി വരെ ഉയർന്ന്, 3 സെക്കൻഡ് കാത്തിരുന്ന്, പിന്നീട് താഴേക്ക് മടങ്ങും.
സൂചന:[സ്പിൻ ഫോർ] ബ്ലോക്കിനുള്ളിലെ ദിശ നിങ്ങൾ മാറ്റേണ്ടതുണ്ട്. [കാത്തിരിക്കുക] ബ്ലോക്കിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, VEXcode V5 സഹായ സവിശേഷത കാണുക. - നിങ്ങളുടെ പരിഷ്കരിച്ച പ്രോജക്റ്റ് കൈ 90 ഡിഗ്രി മുകളിലേക്ക് നീക്കുന്നുണ്ടോ എന്നും, മൂന്ന് സെക്കൻഡ് കാത്തിരുന്ന്, തുടർന്ന് കൈ 90 ഡിഗ്രി താഴേക്ക് നീക്കുന്നുണ്ടോ എന്നും പരിശോധിക്കുക.ഡൗൺലോഡ് ചെയ്യുക.ഉംപ്രവർത്തിപ്പിക്കുക.നിങ്ങളുടെ ArmControl പ്രോജക്റ്റ്.
- [വെയിറ്റ്] ബ്ലോക്ക് പ്രവർത്തിക്കുമ്പോൾ കൈ അതിന്റെ സ്ഥാനം നിലനിർത്തുന്നത് ശ്രദ്ധിക്കുക. ഗുരുത്വാകർഷണബലത്തിനെതിരെ കൈ ഉയർത്തി നിർത്താൻ മോട്ടോർ ബാറ്ററിയിൽ നിന്ന് വൈദ്യുതി ഉപയോഗിക്കുന്നു. മോട്ടോർ സ്റ്റോപ്പ് ഉണ്ടായിരിക്കുന്നതിനുള്ള ഡിഫോൾട്ട് സെറ്റിംഗ്<Hold>സെറ്റിംഗ് ആയതിനാലാണിത്. നിർത്തുന്നതിന് മറ്റ് രണ്ട് ക്രമീകരണങ്ങളുണ്ട് - <Brake>ഉം <Coast>. നിങ്ങൾ അവയെക്കുറിച്ച് മറ്റൊരു ലാബിൽ പഠിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
"Up" ഉം "90 ഡിഗ്രി" ഉം ആയി പാരാമീറ്ററുകൾ സജ്ജമാക്കിയ ഒരു [Spin for] ബ്ലോക്ക് ഉപയോഗിച്ചാണ് മുമ്പ് ഭുജം മുകളിലേക്ക് നീക്കിയിരുന്നത്. വിദ്യാർത്ഥികൾ ഇപ്പോൾ ഒരു [Wait] ബ്ലോക്ക് "3 സെക്കൻഡ്" ആയും ഒരു സെക്കൻഡ് [Spin for] ബ്ലോക്ക് "Down" ആയും ചേർക്കണം. ഭുജം അതിന്റെ യഥാർത്ഥ സ്ഥാനത്തേക്ക് മടങ്ങുന്നതിന് 90 ഡിഗ്രി എന്ന പാരാമീറ്റർ മാറ്റേണ്ടതില്ല.
[കാത്തിരിക്കുക] ബ്ലോക്ക് പ്രവർത്തിക്കുമ്പോൾ, ഭുജം അതിന്റെ സ്ഥാനം നിലനിർത്തും, കാരണം V5 സ്മാർട്ട് മോട്ടോറിന്റെ സ്ഥിരസ്ഥിതി സ്റ്റോപ്പിംഗ് തരം "ഹോൾഡ്" ആണ്. സ്റ്റോപ്പിംഗ് തരം ബ്രേക്ക് അല്ലെങ്കിൽ കോസ്റ്റ് ആയി സജ്ജീകരിച്ചിട്ടുണ്ടെങ്കിൽ, അതിന്റെ ഭാരവും ഗുരുത്വാകർഷണബലവും കാരണം ഭുജം താഴേക്ക് വീഴാൻ തുടങ്ങുമെന്നത് ശ്രദ്ധിക്കേണ്ടതാണ്.
ഘട്ടം 5: ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ച് പൂർത്തിയാക്കുക

![]() ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ചിൽ, ക്ലോബോട്ട് അതിന്റെ കൈ 90 ഡിഗ്രി മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 3 സെക്കൻഡ് കാത്തിരിക്കണം, 45 ഡിഗ്രിയിൽ രണ്ടുതവണ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 5 സെക്കൻഡ് കാത്തിരിക്കണം, തുടർന്ന് 90 ഡിഗ്രിയിൽ മൂന്ന് തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം.
ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ചിൽ, ക്ലോബോട്ട് അതിന്റെ കൈ 90 ഡിഗ്രി മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 3 സെക്കൻഡ് കാത്തിരിക്കണം, 45 ഡിഗ്രിയിൽ രണ്ടുതവണ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം, 5 സെക്കൻഡ് കാത്തിരിക്കണം, തുടർന്ന് 90 ഡിഗ്രിയിൽ മൂന്ന് തവണ കൈ മുകളിലേക്കും താഴേക്കും ചലിപ്പിക്കണം.
ക്ലോബോട്ടിന്റെ പെരുമാറ്റരീതികളുടെ ഒരു പട്ടിക ഇതാ:
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- 3 സെക്കൻഡ് കാത്തിരിക്കൂ.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 45 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 45 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- 5 സെക്കൻഡ് കാത്തിരിക്കൂ.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
- കൈ മുകളിലേക്കും പിന്നീട് താഴേക്കും 90 ഡിഗ്രി കോണിൽ ചലിപ്പിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
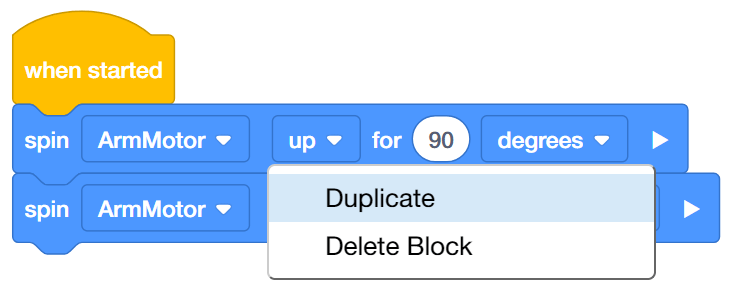
ഈ ചലഞ്ചിലെ മിക്ക ബ്ലോക്കുകളും [സ്പിൻ ഫോർ] ബ്ലോക്കുകളാണ്. കൈ മുകളിലേക്ക് നീക്കാൻ ഒരു [Spin for] ബ്ലോക്കും കൈ താഴേക്ക് നീക്കാൻ ഒരു ബ്ലോക്കും ചേർത്ത ശേഷം, ആദ്യത്തെ [Spin for] ബ്ലോക്കിൽ വലത്- അല്ലെങ്കിൽ ദീർഘ-ക്ലിക്കുചെയ്ത് മൂന്നാമത്തെയും നാലാമത്തെയും [Spin for] ബ്ലോക്കുകൾ ചേർക്കാൻ ഡ്യൂപ്ലിക്കേറ്റ് തിരഞ്ഞെടുക്കുക. ഈ വെല്ലുവിളിക്ക് ആകെ പന്ത്രണ്ട് [സ്പിൻ ഫോർ] ബ്ലോക്കുകൾ ആവശ്യമാണ്. പിന്നെ വെല്ലുവിളി നേരിടുന്നതിനായി പാരാമീറ്ററുകൾ മാറ്റാനും [സ്പിൻ ഫോർ] ബ്ലോക്കുകൾക്കിടയിൽ [കാത്തിരിക്കുക] ബ്ലോക്കുകൾ ചേർക്കാനും കഴിയും.
- അവലോകന ഉദാഹരണം ഫ്ലൈറ്റ് ട്രാഫിക് കൺട്രോളർ ചലഞ്ച് സൊല്യൂഷനുകൾ (ഗൂഗിൾ ഡോക് / .docx / .pdf )
- പ്രോഗ്രാമിംഗ് റൂബ്രിക് (ഗൂഗിൾ ഡോക് / .docx / .pdf )