
Robot Kolunun Programlanması - Blok Tabanlı
![]() Öğretmen Araç Kutusu
-
Etkinlik Taslağı
Öğretmen Araç Kutusu
-
Etkinlik Taslağı
-
Bu keşif öğrencilere V5 Clawbot'un Kol Motorunun temel programlamasını tanıtacaktır.
-
Kol Motorunu programlamayı öğrenmek, öğrencilerin V5 Pençebot'un kol hareketlerini düzgün bir şekilde kontrol etmelerini sağlar. Kullanılan bloklar hakkında daha fazla bilgi içinyardım bilgisiziyaret edin.
V5 Clawbot yola çıkmaya hazır!
Bu keşif size V5 Clawbot'un kolunu kullanarak bazı harika projeler yaratmaya başlamanız için gereken araçları sağlayacak.
- Bu keşifte kullanılacak VEXcode V5 şunları içerir:

- Blok hakkında daha fazla bilgi edinmek için Yardım'ı açın ve ardından [Döndür] bloğunu seçin.

- Gerekli donanıma, mühendislik not defterinize ve VEXcode V5'e sahip olduğunuzdan ve hazır olduğunuzdan emin olun.
![]() Öğretmen İpuçları
Öğretmen İpuçları
Eğer öğrenci VEXcode V5'i ilk kez kullanıyorsa, bu keşif sırasında istediği zaman Eğitimlere başvurabilir. Eğitimler araç çubuğunda bulunur

| Miktar | Gerekli Malzemeler |
|---|---|
| 1 |
VEX V5 Sınıf Başlangıç Seti (güncel yazılımla) |
| 1 |
VEX kodu V5 |
| 1 |
Mühendislik Not Defteri |
| 1 |
Clawbot ve Advanced TrainingBot (2 motorlu aktarma organları, jiroskopik sistem yok) örnek projesi |
Adım 1: Keşfe Hazırlık
Etkinliğe başlamadan önce bu malzemelerin her birini hazır bulunduruyor musunuz? Aşağıdakilerin her birini kontrol edin:
-
Motorlar doğru portlara mı takılı?
-
Akıllı kablolartam olaraktüm motorlara mı takılmış?
-
Pilşarjlı mımi?
![]() Öğretmen İpuçları
Öğretmen İpuçları
Öğrenciler için sorun giderme adımlarının her birini modelleyin.
Adım 2: Yeni Bir Proje Başlatın
Projenize başlamadan önce doğru şablon projeyi seçin. Clawbot ve Advanced TrainingBot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablon örnek projesi Clawbot'un motor konfigürasyonunu içerir. Şablon kullanılmadığı takdirde robotunuz projeyi doğru bir şekilde çalıştıramayacaktır.

Aşağıdaki adımları tamamlayın:
- Dosya menüsünü açın.
- SeçAçÖrnekler.

- Clawbot ve Advanced TrainingBot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablon örnek projesini seçin ve açın.
- Kolu kontrol etmek için programlama yapacağımız için projenizin adınıArmControl.olarak değiştirin.
- Projenizikaydedin.
- ArmControl projesinin adının artık araç çubuğunun ortasındaki pencerede olduğundan emin olun.

![]() Öğretmen İpuçları
Öğretmen İpuçları
- Bu, programlamaya başlangıç düzeyinde bir etkinlik olduğundan, öğretmen adımları modellemeli ve ardından öğrencilerden aynı eylemleri tamamlamalarını istemelidir. Öğretmen daha sonra öğrencilerin adımları doğru bir şekilde takip ettiğinden emin olmak için onları izlemelidir.
- Öğrencilerin Dosya menüsünden Örnekleri Aç seçeneğini seçtiğinden emin olun.
- Öğrencilerin Clawbot ve Advanced TrainingBot (Aktarma Organları 2-motor, Jiroskop Yok)şablon örnek projesini seçtiğinden emin olun.
ÖğrencilereÖrneklersayfasında seçebilecekleri birkaç seçenek olduğunu belirtebilirsiniz. Başka robotlar inşa edip kullandıkça farklı şablonları kullanma şansına sahip olacaklar. - Öğrencilerden proje ismine kendi adlarının baş harflerini veya gruplarının adını eklemelerini isteyebilirsiniz. Öğrencilerden projelerini sunmalarını istemeniz, projelerin farklılaştırılmasına yardımcı olacaktır.
![]() Öğretmen Araç Kutusu
-
Projeleri Kaydetme
Öğretmen Araç Kutusu
-
Projeleri Kaydetme
VEXcode V5'i ilk açtıklarında pencereninVEXcode Projesiolarak etiketlendiğini ve kaydedilmediğini (araç çubuğunda belirtildiği gibi) belirtin. VEXcode V5 ilk açıldığında varsayılan proje adı VEXcode Projesi'dir. ProjeArmContrololarak yeniden adlandırılıp kaydedildiğinde, görüntü Kaydedildi olarak güncellendi. Araç çubuğundaki bu pencereyi kullanarak öğrencilerin doğru projeyi kullanıp kullanmadığını ve kaydedip kaydetmediğini kontrol etmek kolaydır.
Bir proje ilk kaydedildiğinde, VEXcode V5 proje adının yanındaki mesajda belirtildiği gibi sonraki değişiklikleri otomatik olarak kaydeder.
Öğrencilere artık ilk projelerine başlamaya hazır olduklarını söyleyin. Öğrencilere, sadece birkaç basit adımı izleyerek Pençe Robot'un kolunu kaldırıp indirecek bir proje oluşturabileceklerini ve çalıştırabileceklerini açıklayın.
![]() Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğretmen Araç Kutusu
-
Durun ve Tartışın
Bu, öğrenci gruplarının VEXcode V5'te yeni bir projeye başlarken tamamladıkları adımları gözden geçirmeleri için iyi bir noktadır.
Adım 3: Kolu Yukarı Hareket Ettirin
Şimdi kolun yükselmesini programlayarak başlayacağız!
- Programlama alanındaki{When started}bloğunun altına [Spin for] bloğunu ekleyin.
- Eğer bir gösteri izlemek isterseniz VEXcode V5'te Kolu Hareket Ettirme Eğitimini izleyin.

- Slotikonuna tıklayın. Projenizi Robot Beyni'ndeki mevcut slotlardan birine indirebilirsiniz. 1. Yuvaya tıklayın.

- Robotunuzu bilgisayarınıza veya tabletinize bağlayın. Bağlantı başarılı bir şekilde sağlandıktan sonra araç çubuğundaki Beyin simgesi yeşil renge döner.

- Drive projesini Robot Beynine indirmek için araç çubuğundakiİndirbutonuna tıklayın.
![]() Öğretmen Araç Kutusu
-
Bloklarla İlgili Yardım
Öğretmen Araç Kutusu
-
Bloklarla İlgili Yardım
-
Programlama alanında varsayılan olarak {When started}bloğunun zaten bulunduğunu belirtelim. Her proje bu blokla başlayacak. Proje başlatıldığında bağlı bloklar yerleştirildikleri sıraya göre takip edilecektir.
[Spin for] bloğuna tıklayıp programlama alanına sürükleyerek{When started}bloğuna bağlamayı gösterin. Takıldığında bir tık sesi duyacaksınız.
-
Bilgisayar kullanılıyorsa öğrencinin VEX V5 Robot BeyniUSB kablosu kullanılarak bilgisayara bağlı olmalıdır Eğer tablet kullanıyorsanız VEX V5 Robot Beyni Akıllı Radyo kullanılarak tablete bağlanmalıdır.
-
Eğer öğrenciler bilgisayar kullanıyorlarsa, onlardan şimdi Robot Beyni'nden USB kablosunu çıkarmalarını isteyin. Bir projeyi çalıştırırken robotun bilgisayara bağlı olması, robotun bağlantı kablosunu çekmesine neden olabilir.

- ArmControl projesinin seçtiğiniz yuvadaki beyne indirildiğini kontrol edin.
![]() Öğretmen Araç Kutusu
-
Önce Modelleme Seçeneği
Öğretmen Araç Kutusu
-
Önce Modelleme Seçeneği
Tüm öğrencilerin aynı anda denemesini sağlamadan önce projeyi sınıfın önünde modelleyin. Öğrencileri bir alanda toplayın ve Pençe Robot'un kolunu hareket ettirebilmesi için yeterli alan bırakın. Projenin nasıl sonlandırılacağını ve Pençebot'un kolunun dinlenme pozisyonuna nasıl indirileceğini gösterin.
Öğrencilere projelerini çalıştırma sırasının artık onlarda olduğunu söyleyin. Pençebot'un kolunu güvenli bir şekilde kaldırabilmesi için yeterli alana sahip olduklarından emin olun.
- Clawbot'ta projeyiprojenin seçili olduğundan emin olun ve ardından Çalıştır düğmesine basın. İlk Pençe Kol projenizi oluşturduğunuz için tebrikler!
Adım 4: Şunu deneyin: Kolu Aşağı Programlayın
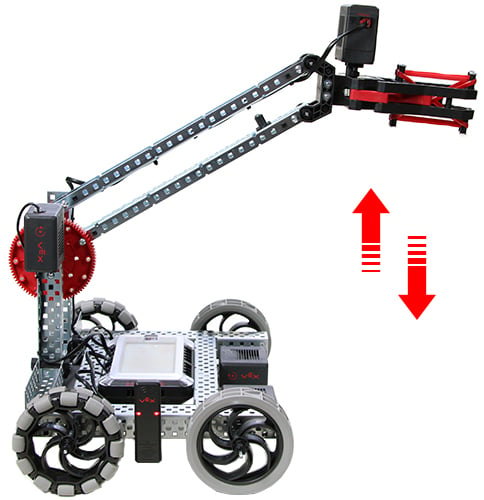
Kolu yukarı hareket ettirecek şekilde programladığınıza göre şimdi de kolu aşağı veya aşağı hareket ettirecek şekilde programlayacaksınız.

![]()
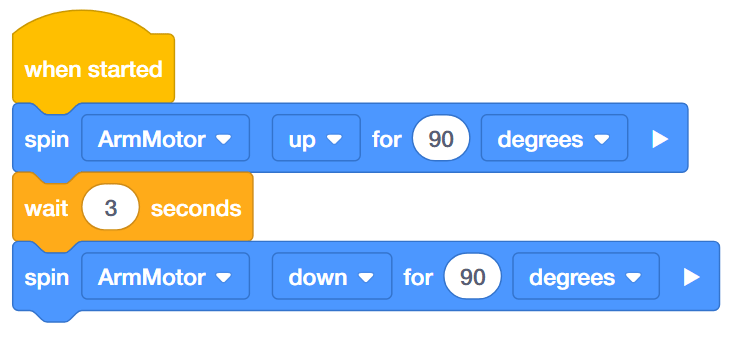
- ArmControl projenize bir [Bekle] bloğu ve ikinci bir [Döndür] bloğu ekleyin; böylece kol 90 dereceye yükselir, 3 saniye bekler ve sonra tekrar aşağı iner.
İpucu:[Döndür] bloğu içindeki yönü değiştirmeniz gerekecektir. [Wait] bloğu hakkında daha fazla bilgi için VEXcode V5 Yardım özelliğine bakın. - Gözden geçirilmiş projenizin kolu 90 derece yukarı hareket ettirdiğini, üç saniye beklediğini ve sonra kolu 90 derece aşağı hareket ettirdiğini,indiripveçalıştırarakArmControl projenizi test edin.
- [Wait] bloğu çalışırken kolun pozisyonunu koruduğuna dikkat edin. Motor, kolu yer çekimine karşı tutmak için aküden güç alır. Çünkü motorun durdurulması için varsayılan ayar<Hold>ayarıdır. Durdurma için iki ayar daha var - <Brake>ve <Coast>. Bunları başka bir laboratuvarda öğreneceksiniz.
![]() Öğretmen Araç Kutusu
-
Çözümü
Öğretmen Araç Kutusu
-
Çözümü
Kol daha önce "Yukarı" ve "90 derece" parametreleri ayarlanmış bir [Spin for] bloğu kullanılarak yukarı doğru hareket ettiriliyordu. Öğrenciler şimdi "3 saniye" olarak ayarlanmış bir [Bekle] bloğu ve "Aşağı" olarak ayarlanmış ikinci bir [Döndür] bloğu eklemeli. Kolun orijinal pozisyonuna dönmesi için 90 derece parametresinin değiştirilmesine gerek yoktur.
[Wait] bloğu çalışırken kol pozisyonunu koruyacaktır çünkü "Hold", V5 Smart Motor'un varsayılan durdurma türüdür. Durma tipi frenleme veya serbest sürüş olarak ayarlandığında, kolun kendi ağırlığı ve yer çekimi kuvveti nedeniyle aşağı doğru düşmeye başlayacağını belirtmek önemlidir.
Adım 5: Uçuş Trafik Kontrolörü Mücadelesini Tamamlayın
![]() Uçuş Trafik Kontrolörü Mücadelesinde, Pençe Robotu kolunu 90 derecelik bir açıyla yukarı aşağı hareket ettirmeli, 3 saniye beklemeli, kolunu iki kez 45 derecelik bir açıyla yukarı aşağı hareket ettirmeli, 5 saniye beklemeli ve ardından kolunu üç kez 90 derecelik bir açıyla yukarı aşağı hareket ettirmeli.
Uçuş Trafik Kontrolörü Mücadelesinde, Pençe Robotu kolunu 90 derecelik bir açıyla yukarı aşağı hareket ettirmeli, 3 saniye beklemeli, kolunu iki kez 45 derecelik bir açıyla yukarı aşağı hareket ettirmeli, 5 saniye beklemeli ve ardından kolunu üç kez 90 derecelik bir açıyla yukarı aşağı hareket ettirmeli.
İşte Pençebot'un davranışlarının listesi:
- Kolunuzu 90 derece yukarı ve aşağı hareket ettirin.
- 3 saniye bekleyin.
- Kolunuzu 45 derece yukarı ve aşağı hareket ettirin.
- Kolunuzu 45 derece yukarı ve aşağı hareket ettirin.
- 5 saniye bekleyin.
- Kolunuzu 90 derece yukarı ve aşağı hareket ettirin.
- Kolunuzu 90 derece yukarı ve aşağı hareket ettirin.
- Kolunuzu 90 derece yukarı ve aşağı hareket ettirin.
![]() Öğretmen Araç Kutusu
-
Çözümü
Öğretmen Araç Kutusu
-
Çözümü
Bu meydan okumadaki blokların çoğu [Döndür] bloklarıdır. Kolu yukarı doğru hareket ettirmek için bir [Spin for] bloğu ve kolu aşağı doğru hareket ettirmek için bir blok ekledikten sonra, ilk [Spin for] bloğuna sağ tıklayabilir veya uzun süre tıklayıp Çoğalt'ı seçerek üçüncü ve dördüncü [Spin for] bloğunu vb. ekleyebilirsiniz. Bu meydan okuma için toplamda on iki [Döndür] bloğuna ihtiyaç vardır. Daha sonra meydan okumayı karşılamak için parametreler değiştirilebilir ve [Döndür] blokları arasına [Bekle] blokları eklenebilir.

- Örnek Uçuş Trafik Kontrolörü Mücadelesi çözümleri incelemesi (Google Dokümanı / .docx / .pdf )
- Programlama Ölçütü (Google Dokümanı / .docx / .pdf )