
Programování robotického ramene - založené na blocích
Clawbot V5 je připraven dosáhnout!
Tento průzkum vám poskytne nástroje, abyste mohli začít vytvářet skvělé projekty, které využívají paži V5 Clawbota.
- VEXcode V5, který bude použit v tomto průzkumu, zahrnuje:

- Chcete-li se dozvědět více informací o bloku, otevřete nápovědu a poté vyberte blok [Otočit pro].

- Ujistěte se, že máte stažený a připravený potřebný hardware, svůj technický notebook a VEXcode V5.
![]() Tipy pro učitele
Tipy pro učitele
Pokud student používá VEXcode V5 poprvé, může si tutoriály kdykoli během tohoto zkoumání přečíst. Výukové programy se nacházejí v panelu nástrojů

| Množství | Potřebné materiály |
|---|---|
| 1 |
Startovací sada VEX V5 pro učebnu (s aktuálním firmwarem) |
| 1 |
VEXkód V5 |
| 1 |
Inženýrský zápisník |
| 1 |
Příklad projektu s Clawbotem a Advanced TrainingBot (pohon 2 motory, bez gyroskopu) |
Krok 1: Příprava na průzkum
Než začnete s aktivitou, máte každou z těchto položek připravenou? Zkontrolujte každou z následujících možností:
-
Jsou motory zapojeny do správných portů?
-
Jsou inteligentní kabelyzcela zasunutydo všech motorů?
![]() Tipy pro učitele
Tipy pro učitele
Předveďte studentům každý krok řešení problémů.
Krok 2: Spusťte nový projekt
Před zahájením projektu vyberte správnou šablonu projektu. Ukázkový projekt šablony Clawbot a Advanced TrainingBot (pohon 2 motory, bez gyroskopu) obsahuje konfiguraci motorů Clawbota. Pokud šablonu nepoužijete, váš robot nespustí projekt správně.

Proveďte následující kroky:
- Otevřete nabídku Soubor.
- VyberteOtevřítPříklady.
- Vyberte a otevřete vzorový projekt šablony Clawbot a Advanced TrainingBot (pohon se 2 motory, bez gyroskopu).
- Protože budeme programovat pro ovládání ramene, přejmenujte svůj projektArmControl.
- Uložtesvůj projekt.
- Zkontrolujte, zda je název projektu ArmControl nyní v okně uprostřed panelu nástrojů.

![]() Tipy pro učitele
Tipy pro učitele
- Protože se jedná o úvodní aktivitu s programováním, měl by učitel nejprve namodelovat jednotlivé kroky a poté požádat studenty, aby provedli stejné akce. Učitel by pak měl sledovat, zda studenti správně dodržují kroky.
- Ujistěte se, že studenti vybrali v nabídce Soubor možnost Otevřít příklady.
- Ujistěte se, že si studenti vybrali šablonu projektu Clawbot a Advanced TrainingBot (pohon se 2 motory, bez gyroskopu)
Můžete studentům upozornit, že na stráncePříkladyje k dispozici několik možností, ze kterých si mohou vybrat. Při stavbě a používání jiných robotů budou mít možnost používat různé šablony. - Můžete studenty požádat, aby k názvu projektu přidali své iniciály nebo název své skupiny. To pomůže rozlišit projekty, pokud požádáte studenty, aby je odevzdali.
![]() Nástroje pro učitele
projektů
Nástroje pro učitele
projektů
Zdůrazněte, že při prvním otevření VEXcode V5 bylo okno označeno jakoVEXcode Projecta nebylo uloženo (uvedeno na panelu nástrojů). Projekt VEXcode je výchozí název projektu při prvním otevření VEXcode V5. Jakmile byl projekt přejmenovánArmControla uložen, zobrazení se aktualizovalo na Uloženo. Pomocí tohoto okna v panelu nástrojů lze snadno zkontrolovat, zda studenti používají správný projekt a zda je uložen.
Jakmile je projekt počáteční uložen, VEXcode V5 automaticky ukládá všechny následné změny, jak je indikováno zprávou vedle názvu projektu.
Řekněte studentům, že jsou nyní připraveni začít se svým prvním projektem. Vysvětlete studentům, že pouhým provedením několika jednoduchých kroků budou schopni vytvořit a spustit projekt, který bude zvedat a spouštět paži Clawbota.
![]() Sada nástrojů pro učitele
Zastavte
a diskutujte
Sada nástrojů pro učitele
Zastavte
a diskutujte
Toto je dobrý bod k zastavení a k tomu, aby si studentské skupiny zopakovaly kroky, které byly právě dokončeny při zahájení nového projektu ve VEXcode V5.
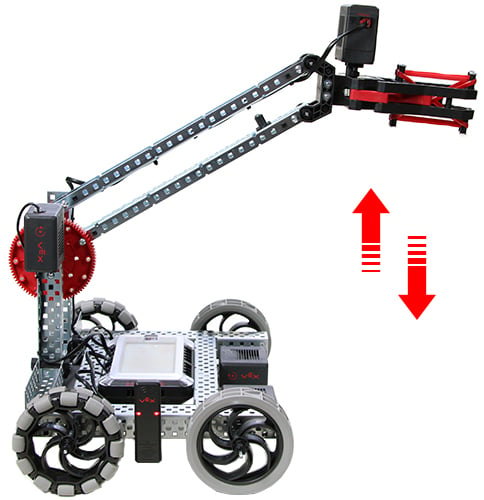
Krok 3: Posuňte paži nahoru
Nyní začneme naprogramováním paže, aby se zvedla!
- V programovací oblasti přidejte blok [Spin for] pod blok{When started}.
- Pokud byste chtěli demonstraci, podívejte se na výukový program Moving the Arm ve VEXcode V5.

- Klikněte na ikonuSlot. Svůj projekt si můžete stáhnout do jednoho z dostupných slotů v Robot Brain. Klikněte na Slot 1.

- Připojte robota k počítači nebo tabletu. Po úspěšném připojení se ikona Mozek na panelu nástrojů změní na zelenou.

- Klikněte na tlačítkoStáhnoutna panelu nástrojů pro stažení projektu Drive do robotického mozku.
![]() Sada nástrojů
učitele
Pomoc s bloky
Sada nástrojů
učitele
Pomoc s bloky
-
Upozorňujeme, že v programovací oblasti je již standardně umístěn blok {When started}. Každý projekt bude začínat tímto blokem. Po spuštění projektu budou propojené bloky sledovány v pořadí, v jakém byly umístěny.
Ukažte kliknutí na blok [Spin for] a jeho přetažení do programovací oblasti, čímž jej propojíte s blokem{When started}. Při připevnění uslyšíte cvaknutí.
-
Pokud používáte počítač, měl by mít student připojeného robota VEX V5 Robot Brain k počítači pomocí kabelu USB. Pokud používáte tablet, měl by být robotický mozek VEX V5 k tabletu připojen pomocí chytrého rádia.
-
Pokud studenti používají počítač, požádejte je, aby nyní odpojili USB kabel od robotického mozku. Pokud je robot během spouštění projektu připojen k počítači, může to způsobit, že bude tahat za připojovací kabel.

- Zkontrolujte, zda se projekt ArmControl stáhl do mozku ve vámi zvoleném slotu.
![]() Sada nástrojů
modelovat jako první
Sada nástrojů
modelovat jako první
Předveďte spuštění projektu před třídou, než ho všichni studenti zkusí najednou. Shromážděte studenty na jednom místě a nechte dostatek prostoru, aby Clawbot mohl pohybovat svou paží. Ukažte, jak ukončit projekt a jak vrátit paži Clawbota do klidové polohy.
Řekněte studentům, že nyní je řada na nich, aby spustili své projekty. Ujistěte se, že mají dostatek prostoru pro bezpečné zvednutí paže Clawbota.
- Spusťteprojekt na Clawbotu tak, že se ujistíte, že je projekt vybrán, a poté stisknete tlačítko Spustit. Gratulujeme k vytvoření vašeho prvního projektu Claw Arm!
Krok 4: Zkuste toto: Naprogramujte rameno dolů
Nyní, když jste naprogramovali rameno, aby se pohybovalo nahoru, budete nyní naprogramovat rameno pro spouštění nebo pohyb dolů.

![]()
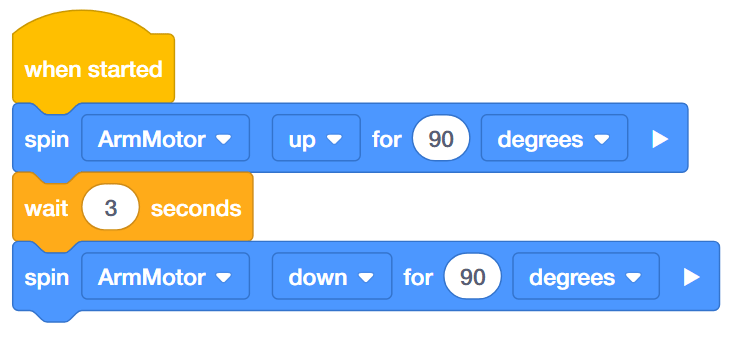
- Přidejte do projektu ArmControl blok [Wait] a druhý blok [Spin for] tak, aby se rameno zvedlo o 90 stupňů, počkalo 3 sekundy a poté se vrátilo zpět dolů.
Nápověda:Budete muset změnit směr v bloku [Spin for]. Další informace o bloku [Wait] naleznete v nápovědě k funkci VEXcode V5. - OtestujtespuštěnímvašehoArmControl.
- Všimněte si, že rameno drží svou pozici, zatímco běží blok [Čekání]. Motor čerpá energii z baterie, aby držel rameno proti gravitační síle. Je to proto, že výchozí nastavení pro zastavení motoru je<Hold>. Pro zastavení existují dvě další nastavení – <Brake>a <Coast>. O těch se dozvíte v jiné laboratoři.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Rameno bylo dříve posunuto nahoru pomocí bloku [Spin for] s parametry nastavenými na „Nahoru“ a na „90 stupňů“. Studenti by nyní měli přidat blok [Čekání] nastavený na „3 sekundy“ a druhý blok [Otočení po dobu] nastavený na „Dolů“. Parametr 90 stupňů není nutné měnit, aby se rameno vrátilo do původní polohy.
Během běhu bloku [Čekání] rameno podrží svou polohu, protože „Podržení“ je výchozí typ zastavení inteligentního motoru V5. Je důležité si uvědomit, že pokud by byl typ zastavení nastaven na brzdění nebo dojezd, rameno by se v důsledku své hmotnosti a gravitační síly začalo snášet dolů.
Krok 5: Dokončete výzvu Flight Traffic Controller Challenge
![]() Ve výzvě Flight Traffic Controller Challenge musí Clawbot pohybovat paží nahoru a dolů, každý o 90 stupňů, počkat 3 sekundy, dvakrát pohnout paží nahoru a dolů o 45 stupňů dvakrát, počkat 5 sekund a poté posunout paži nahoru a dolů. třikrát na 90 stupňů.
Ve výzvě Flight Traffic Controller Challenge musí Clawbot pohybovat paží nahoru a dolů, každý o 90 stupňů, počkat 3 sekundy, dvakrát pohnout paží nahoru a dolů o 45 stupňů dvakrát, počkat 5 sekund a poté posunout paži nahoru a dolů. třikrát na 90 stupňů.
Zde je seznam chování Clawbota:
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
- Počkejte 3 sekundy.
- Pohybujte paží nahoru a poté dolů o 45 stupňů.
- Pohybujte paží nahoru a poté dolů o 45 stupňů.
- Počkejte 5 sekund.
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
- Pohybujte paží nahoru a poté dolů o 90 stupňů.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
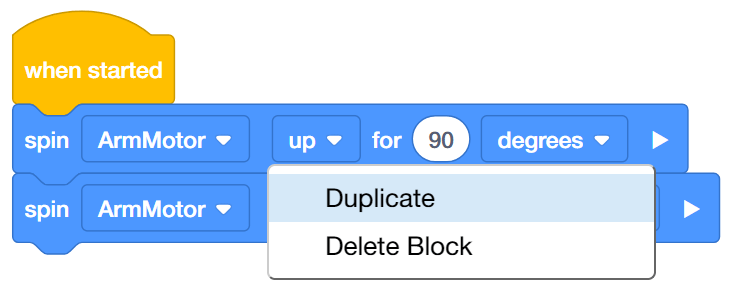
Většina bloků v této výzvě jsou bloky typu [Spin for]. Po přidání bloku [Spin for] pro pohyb paže nahoru a bloku pro pohyb paže dolů můžete kliknout pravým tlačítkem myši nebo dlouze kliknout na první blok [Spin for] a vybrat možnost Duplikovat, čímž přidáte třetí a čtvrtý blok [Spin for] a tak dále. Pro tuto výzvu je celkem potřeba dvanáct bloků [Spin for]. Pak lze parametry změnit tak, aby splňovaly daný požadavek, a mezi bloky [Spin for] lze přidat bloky [Wait].
- Příklad recenze Řešení úkolu pro řídícího letového provozu (Dokumentace Google / .docx / .pdf )
- Programovací rubrika (Google Doc / .docx / .pdf )