
Leçon 2 : Démarrage avec la cellule de travail VEX CTE
Le kit CTE Workcell comprend un cerveau VEX EXP qui sera utilisé dans les futures unités. Le bras à 6 axes est également contrôlé via VEXcode EXP, qui devra être configuré avant de pouvoir commencer à déplacer le bras à 6 axes.
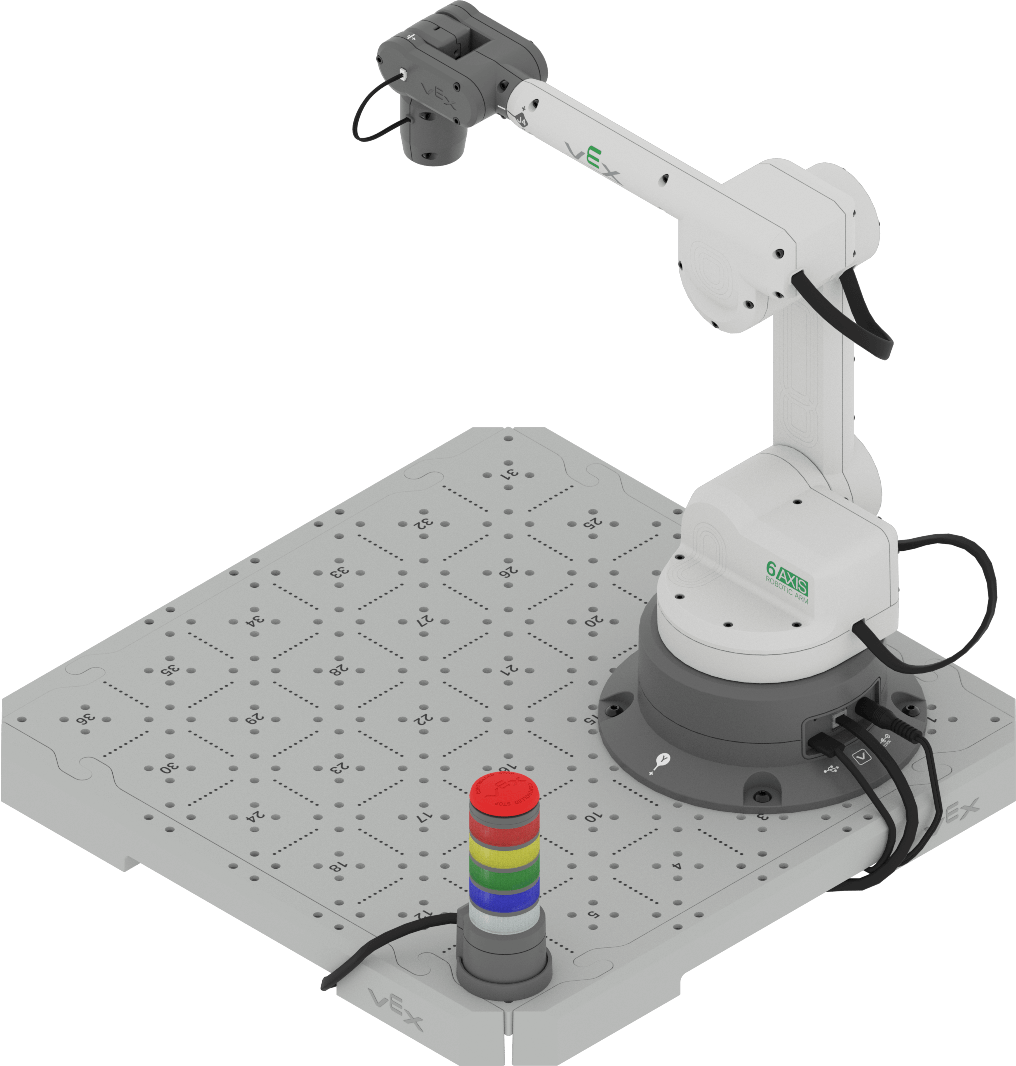
Sur cette page, vous allez attacher le bras à 6 axes et la tour de signalisation à la tuile CTE, brancher tous les câbles nécessaires et configurer VEXcode EXP.
Construire
Regardez cette vidéo pour apprendre à utiliser les instructions de construction 3D.
Cette vidéo montre des exemples d'instructions de construction d'autres plates-formes VEX, cependant les informations sur la façon d'utiliser ces instructions 3D s'appliquent toujours au kit CTE Workcell.
Connexion des câbles du bras robotisé
Pour utiliser le bras 6 axes avec VEXcode EXP, il doit d'abord être connecté à un appareil, ainsi qu'à une source d'alimentation.
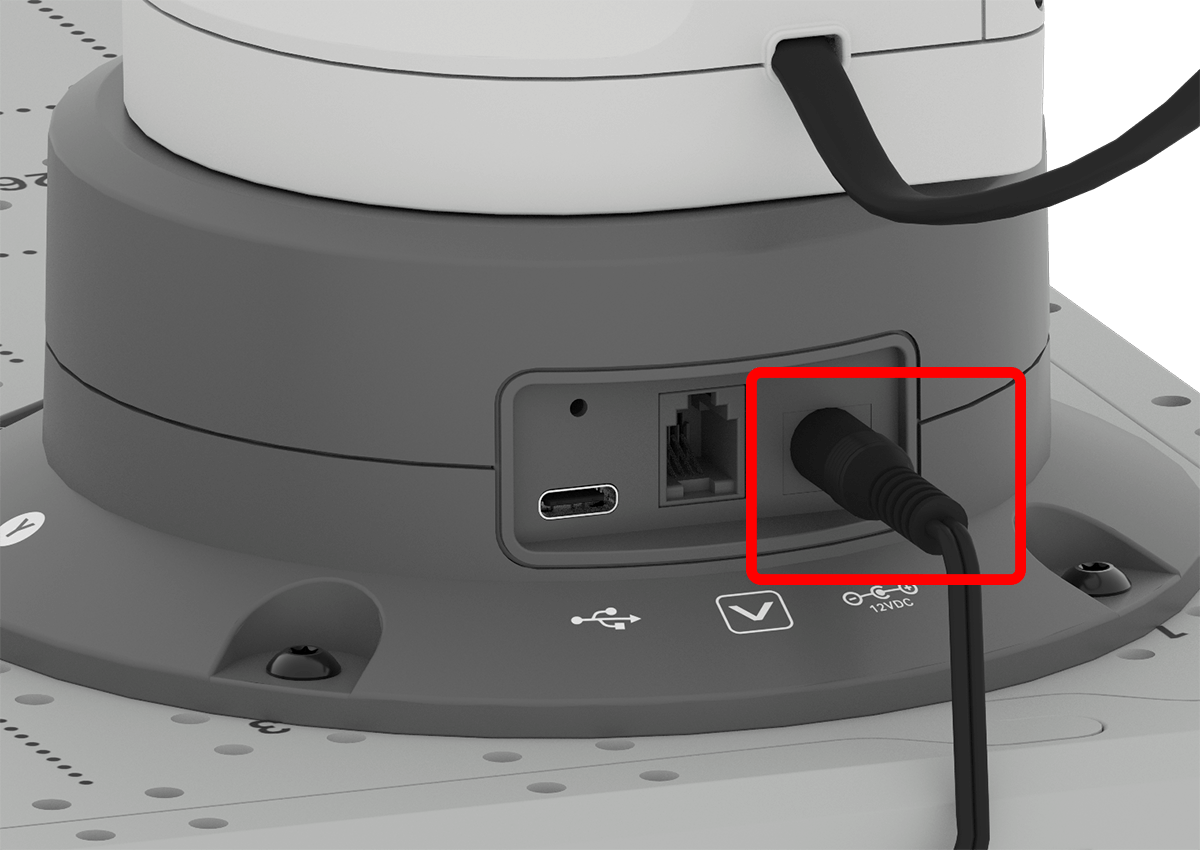
Connectez le câble d’alimentation à la base du bras à 6 axes et l’autre extrémité à une source d’alimentation.
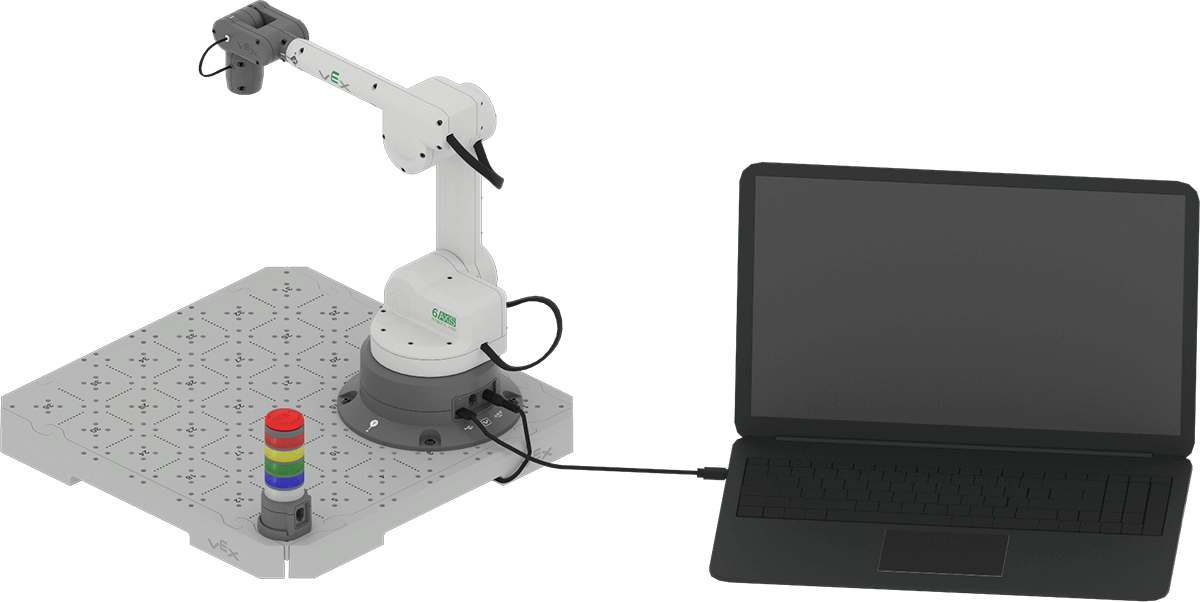
Connectez une extrémité du câble USB à la base du bras 6 axes et l’autre extrémité à un ordinateur.
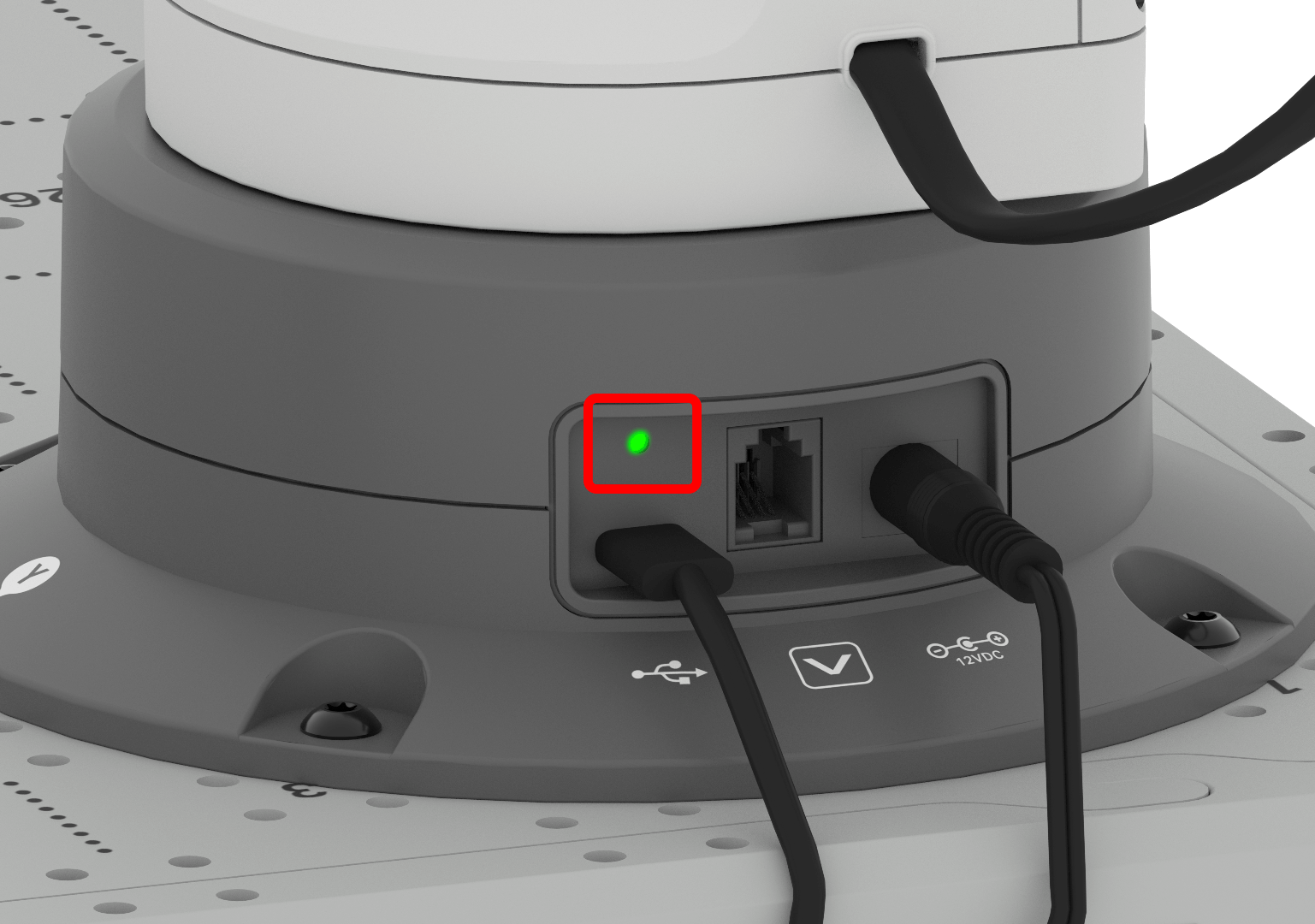
Une fois le bras à 6 axes alimenté et connecté à un ordinateur, le voyant lumineux s'allume en vert.
Premiers pas avec VEXcode EXP
Suivez la section « Mise en route avec VEXcode EXP » ci-dessous correspondant à la version de VEXcode EXP que vous utilisez (basée sur le Web ou sur une application). Vous ne savez pas quelle version vous utilisez ? Demandez à votre instructeur.
Accéder aux projets VEX CTE dans VEXcode EXP basé sur le Web
Suivez les étapes ci-dessous pour accéder à VEXcode EXP basé sur le Web et ouvrir un projet VEX CTE. Pour accéder à la version Web de VEXcode EXP, vous devez utiliser le navigateur Google Chrome ou Microsoft Edge sur un ordinateur Windows, Mac ou Chromebook.
To access VEXcode EXP, navigate to codeexp.vex.com.
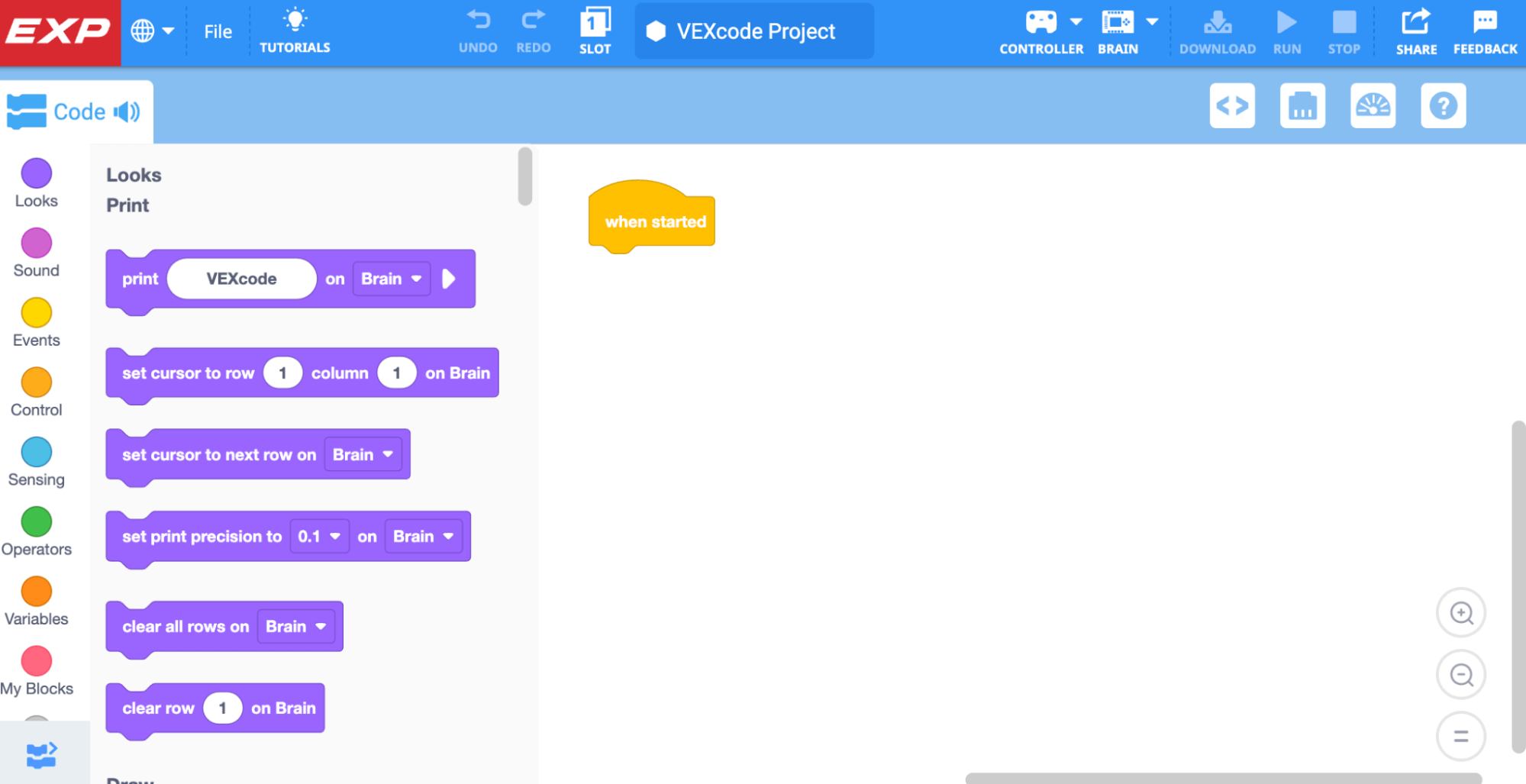
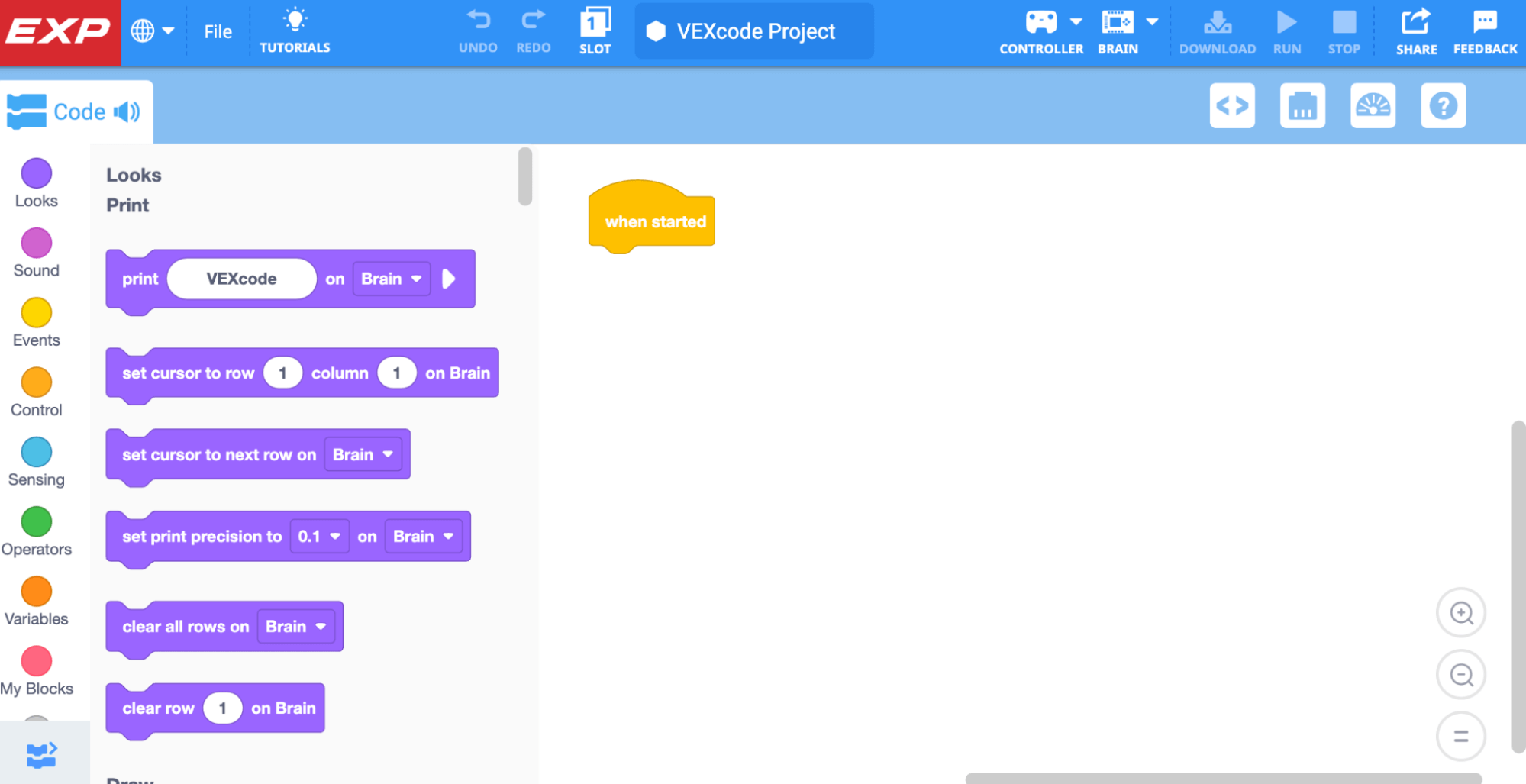
Créez un nouveau projet Arm en suivant les étapes de cette vidéo. Les étapes présentées dans la vidéo sont :
- Ouvrir le menu Fichier
- Sélectionnez « Nouveau projet de blocs »
- Sélectionnez l'icône du bras
Connexion du bras à 6 axes à VEXcode EXP basé sur le Web
Il existe des étapes supplémentaires pour connecter le bras à 6 axes lors de l'utilisation de la version Web de VEXcode EXP. Suivez les étapes ci-dessous.
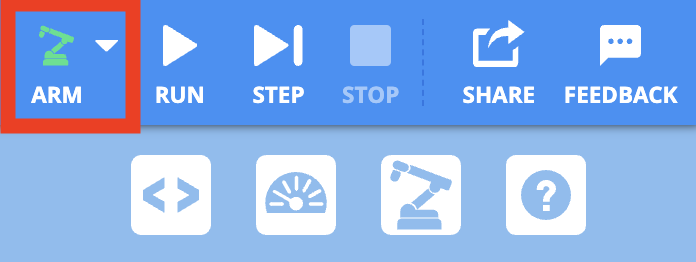
Pour connecter le bras 6 axes, sélectionnez l'icône ARM dans la barre d'outils.
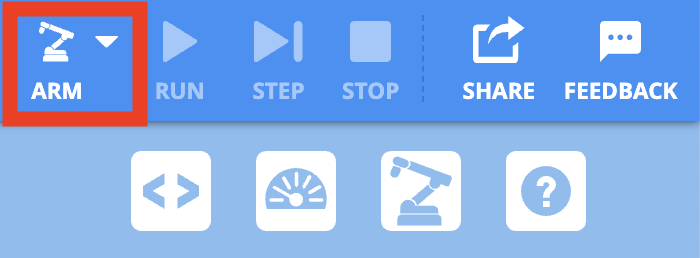
Sélectionnez Connecter le bras.

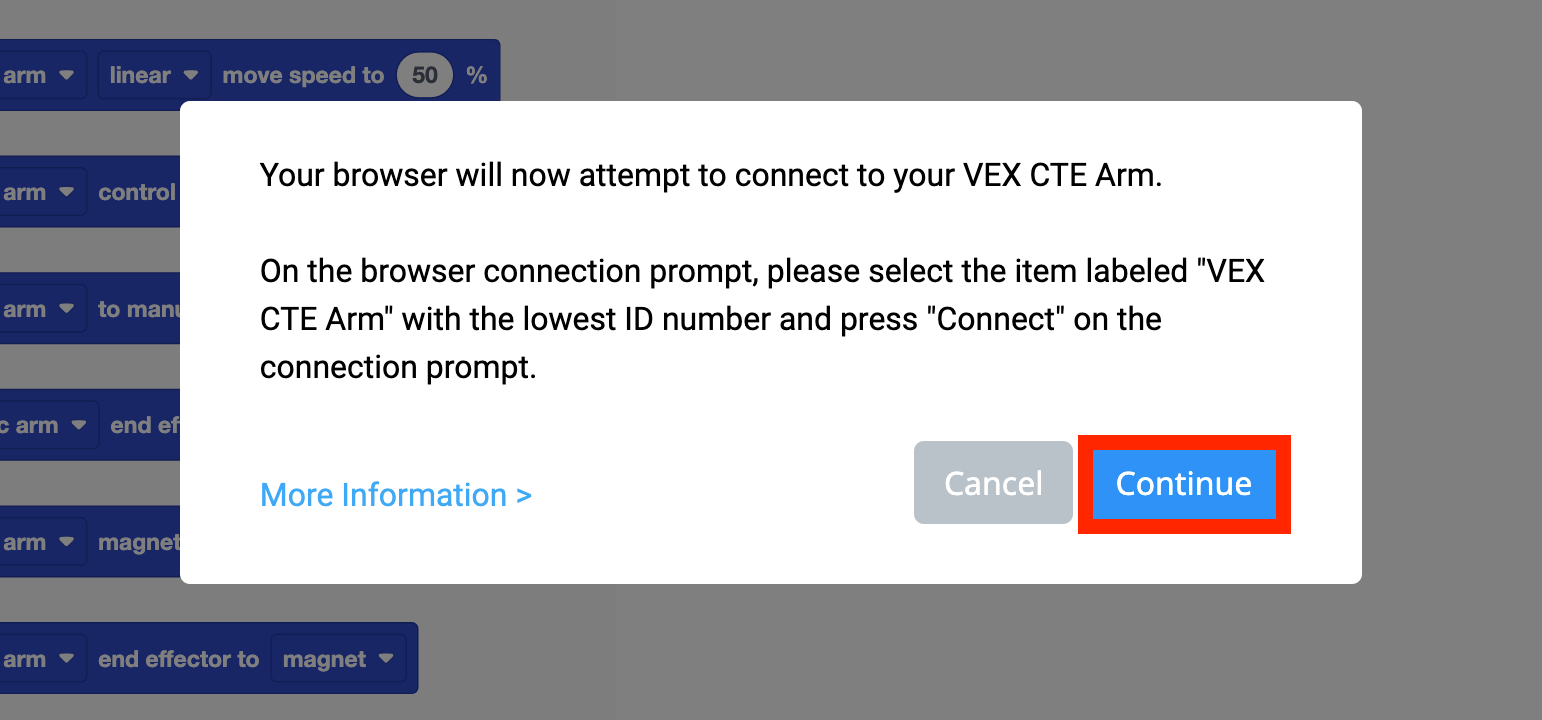
Une zone de texte apparaîtra expliquant quelle option choisir dans la fenêtre de connexion suivante.
Sélectionnez Continuer dans la zone de texte pour ouvrir la fenêtre de connexion.
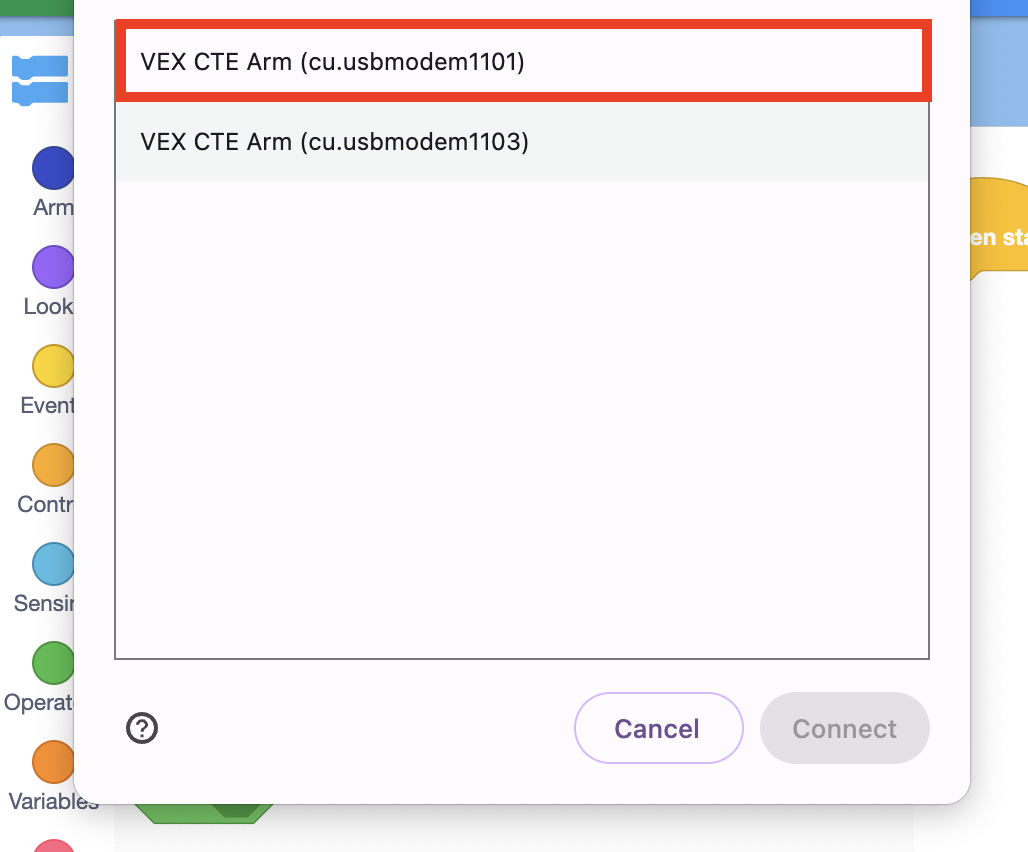
Sélectionnez le bras à 6 axes indiquant Port de communication.
Si le port de communication n’est pas comme option, passez à l’étape suivante.
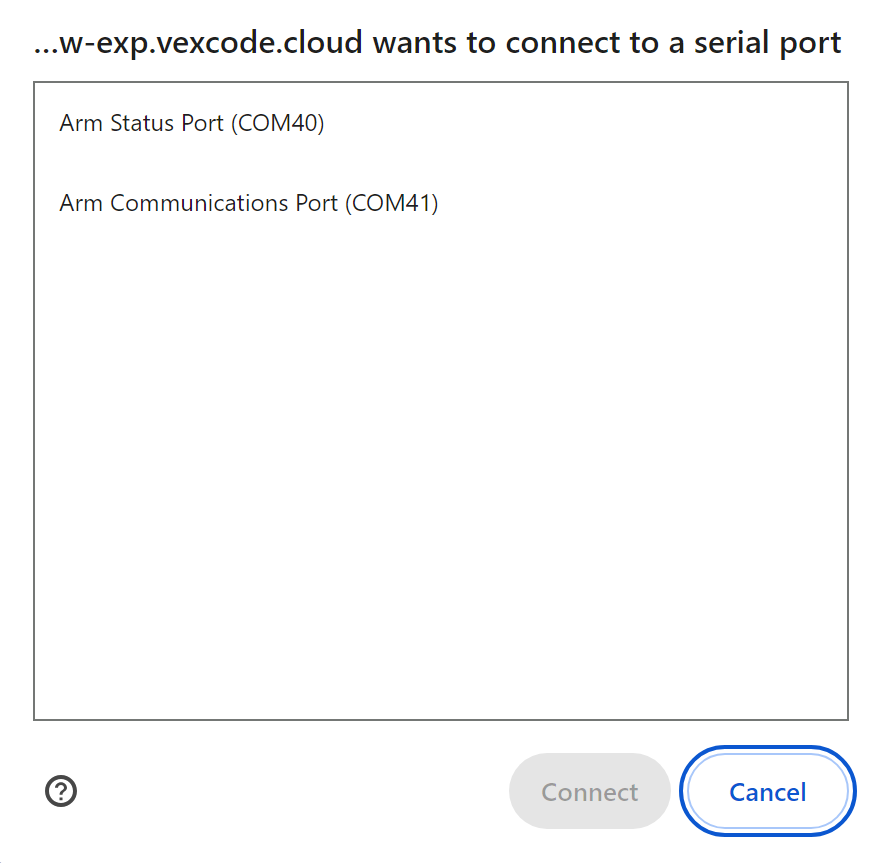
Si le port de communication n'est pas affiché comme option, sélectionnez le bras à 6 axes avec le numéro d'identification le plus bas.
Sélectionnez le bouton Connect , une fois que vous avez choisi un bras 6 axes.
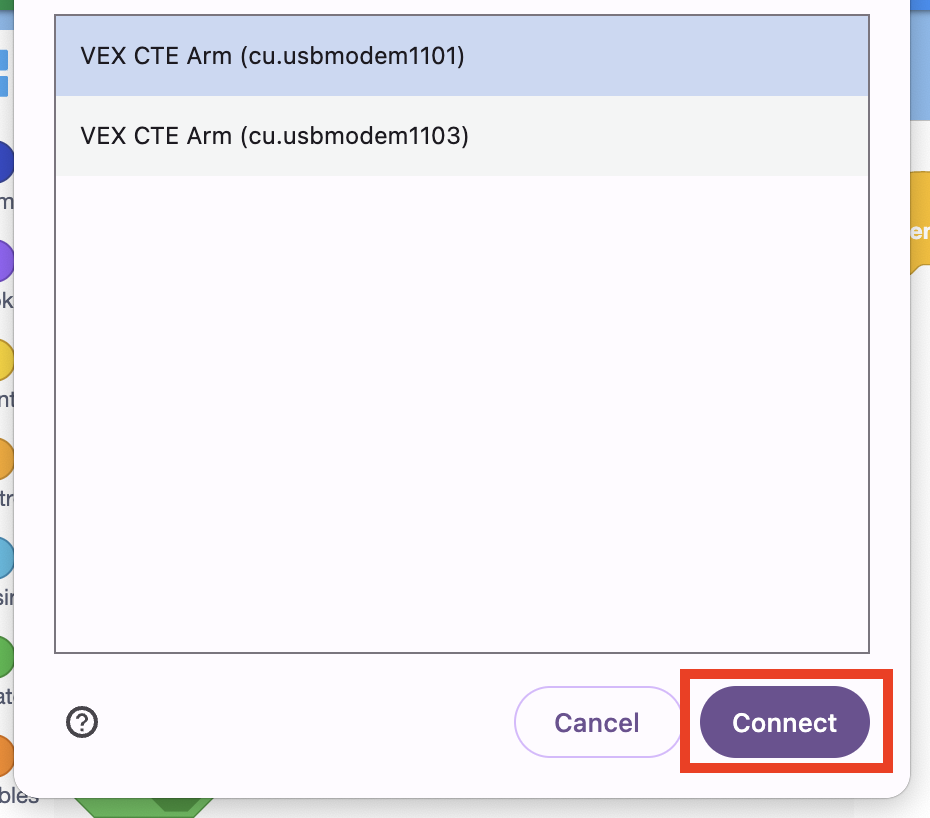
Une fois le bras à 6 axes correctement connecté, l'icône du bras devient verte.
Accès aux projets CTE et connexion du bras à 6 axes dans VEXcode EXP basé sur l'application
Suivez les étapes ci-dessous pour accéder à VEXcode EXP et vous connecter à l'aide de la version basée sur l'application. La version basée sur l'application est disponible en téléchargement sur les appareils Windows et Mac.
Ouvrez VEXcode EXP.
Créez un nouveau projet Arm en suivant les étapes de cette vidéo. Les étapes indiquées sont :
- Ouvrir le menu Fichier
- Sélectionnez « Nouveau projet de blocs »
- Sélectionnez l'icône du bras
L'icône du bras s'affiche en vert une fois que le bras à 6 axes est sous tension et connecté à l'appareil avec VEXcode EXP ouvert.

Vérifiez votre compréhension
Avant de commencer la réflexion de mi-unité et l'ajustement des objectifs, assurez-vous de comprendre les concepts abordés dans cette leçon en répondant aux questions du document ci-dessous dans votre cahier d' .
Vérifiez vos questions de compréhension > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour terminer la réflexion de mi-unité.