
Qu'est-ce qu'un capteur de vision ?
![]() Boîte à outils de l'enseignant
-
Le but de cette page
Boîte à outils de l'enseignant
-
Le but de cette page
Cette page présentera aux étudiants ce qu'est un capteur de vision et certaines de ses capacités. Les élèves analyseront ensuite une image partielle d'un exemple de projet pour voir comment le capteur de vision peut être utilisé avec VEXcode IQ.
Les questions Motivate Discussion au bas de la page peuvent être complétées en tant que discussion en classe ou individuellement dans les cahiers d'ingénierie des étudiants.
Description
Le capteur de vision permet à votre robot de collecter des données visuelles à partir d'un flux en direct. Un flux en direct est une transmission en continu de ce qu'une caméra vidéo capture. Le capteur de vision est comme une caméra intelligente qui peut observer, sélectionner, ajuster et stocker les couleurs et les objets qui apparaissent dans son champ visuel.
 Capteur de
Capteur de Capacités :
- Ce capteur peut être utilisé pour reconnaître les couleurs et les motifs de couleurs.
- Ce capteur peut être utilisé pour suivre un objet.
- Ce capteur peut être utilisé pour collecter des informations sur l'environnement.
Le capteur de vision permet au robot d'utiliser les données d'entrée visuelles de son
environnement. Le projet peut ensuite déterminer comment les données d'entrée visuelles
doivent affecter le comportement du robot. Par exemple, le robot pourrait effectuer des
actions (sortie) telles que faire tourner des moteurs ou afficher des résultats sur l'écran
LCD.
Le capteur de vision peut également capturer un instantané de ce qui se trouve
devant lui et l'analyser en fonction de ce que l'utilisateur demande. Par exemple, un
utilisateur peut recueillir des données à partir de l'instantané telles que : de quelle
couleur est l'objet ? Y a-t-il un objet détecté ? Quelle est la taille de l'objet (largeur
et hauteur) ?
Le robot peut ensuite prendre des décisions en fonction de ces données.
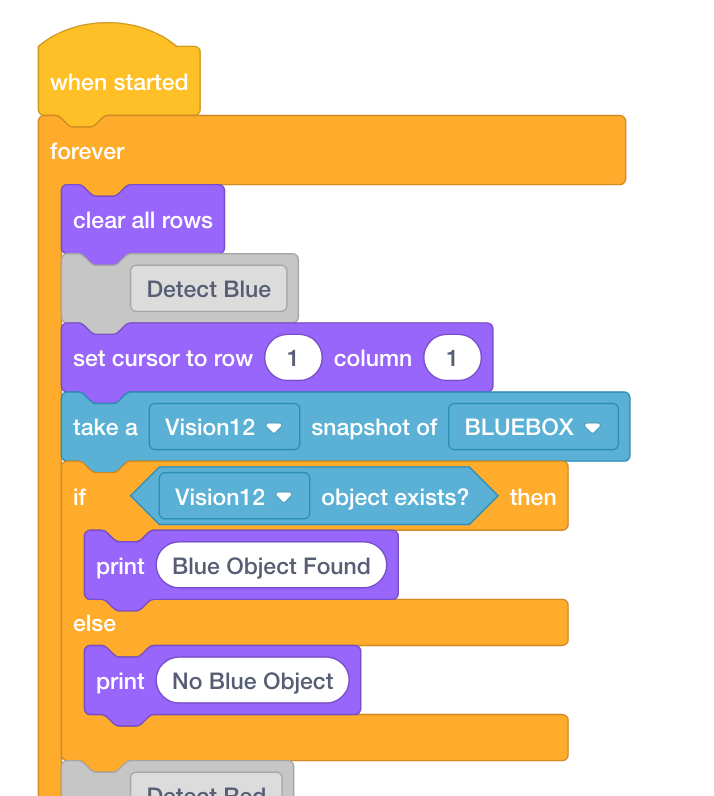
L'exemple de projet partiel ci-dessous montre comment cela se fait. Dans cette première
partie de l'exemple de projet, le robot va imprimer « Blue Object Found » si un objet bleu
est détecté et « No Blue Object » sinon. Il s'agit de la première des trois décisions prises
dans le cadre du projet d'exemple, mais les deuxième et troisième décisions ne sont pas
présentées ici.
![]() Motiver la discussion
Motiver la discussion
Q : Quels types d'emplois humains bénéficieraient de l'aide d'un
robot avec un capteur de vision ?
R : Écoutez les travaux humains qui bénéficieraient de la capacité
de voir dans des environnements et/ou de manipuler des environnements à distance (par
exemple, observer des animaux dans la nature, désarmer des explosifs ou effectuer une
chirurgie assistée par robot).
Q : Nommez un périphérique et décrivez comment il utilise les
entrées, les sorties et les processus.
R : Une réponse possible pourrait être une calculatrice qui prend
les séquences de nombres et d'opérateurs mathématiques qu'une personne entre, traite ces
nombres et opérations pour calculer un résultat, puis affiche ce résultat sur un écran
pour la personne.
Q : Pourquoi pensez-vous qu'une boucle Forever a été
utilisée dans le projet illustré ci-dessus ?
R : Une boucle Forever a été utilisée pour que le
capteur de vision vérifie en permanence les multiples instantanés pris pour voir si un
objet rouge est visible par le capteur.