
![]() 教師用ツールボックス
-
このページの目的
教師用ツールボックス
-
このページの目的
このページでは、ビジョン センサーとは何か、およびその機能の一部を学生に紹介します。 次に、学生はサンプル プロジェクトの部分画像を分析して、VEXcode IQ でビジョン センサーをどのように使用できるかを確認します。
ページの下部にある「モチベーションを高めるディスカッション」の質問は、クラスでのディスカッションとして、または生徒のエンジニアリング ノートに個別に記入することができます。
説明
ビジョン センサーを使用すると、ロボットはライブ フィードから視覚データを収集できます。 ライブ フィードは、ビデオ カメラがキャプチャしている内容のストリーミング送信です。 ビジョンセンサーは、視野内に現れる色やオブジェクトを観察、選択、調整、保存できるスマートカメラのようなものです。

能力:
-
このセンサーは色やカラーパターンの認識に使用できます。
-
このセンサーは物体を追跡するために使用できます。
-
このセンサーは環境に関する情報を収集するために使用できます。
ビジョン センサーを使用すると、ロボットは環境からの視覚入力データを使用できるようになります。 その後、プロジェクトは視覚入力データがロボットの動作にどのような影響を与えるかを決定できます。 たとえば、ロボットはモーターを回転させたり、結果を LCD 画面に表示したりするなどのアクション (出力) を実行できます。
ビジョンセンサーは、目の前にあるもののスナップショットをキャプチャし、ユーザーの質問に応じて分析することもできます。 たとえば、ユーザーはスナップショットからオブジェクトの色などのデータを収集できます。 何か物体が検出されたのでしょうか? オブジェクトの大きさ (幅と高さ) はどれくらいですか?
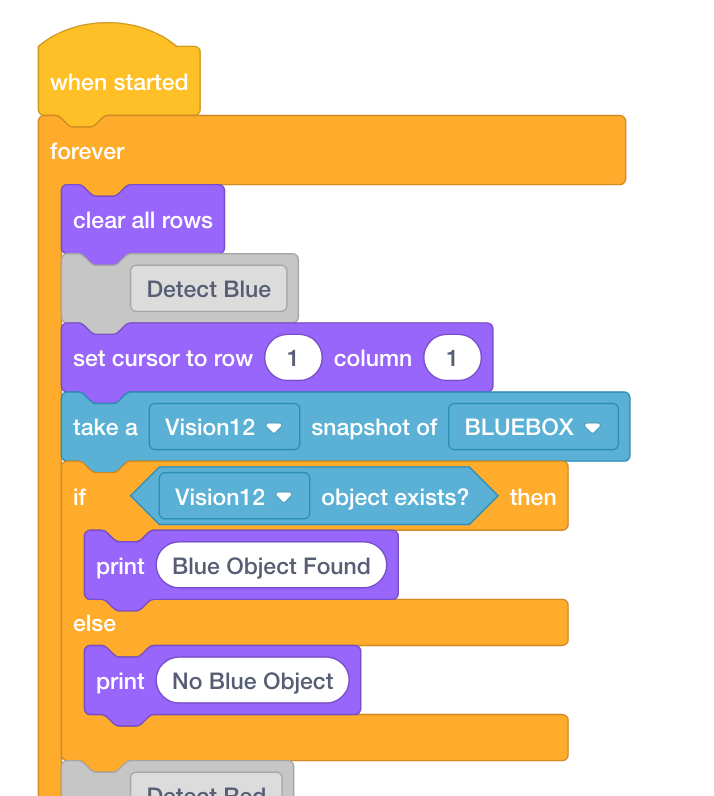
ロボットはこのデータに基づいて意思決定を行うことができます。 以下の部分的なサンプル プロジェクトは、これがどのように行われるかを示しています。 サンプル プロジェクトの最初の部分では、ロボットは、青い物体が検出された場合は「青い物体が見つかりました」を出力し、それ以外の場合は「青い物体はありません」を出力します。 これはサンプル プロジェクト内の 3 つの決定のうちの 1 つ目ですが、2 番目と 3 番目の決定はここには示されていません。
![]() ディスカッションの動機付け
ディスカッションの動機付け
Q: 視覚センサーを備えたロボットの助けを借りれば、人間のどのような仕事にメリットが得られますか?
A: 環境を観察したり、遠隔地から環境を操作したりする能力から恩恵を受ける人間の仕事について聞いてください (例: 野生動物の観察、爆発物の解除、ロボット支援手術の実行など)。
Q: デバイスに名前を付け、そのデバイスが入力、出力、プロセスをどのように使用するかを説明してください。
A: 考えられる答えは、人が入力した一連の数値と算術演算子を受け取り、それらの数値と演算を処理して結果を計算し、その結果を画面に出力する計算機です。
Q: 上記のプロジェクトで 永遠 ループが使用されたのはなぜだと思いますか?
A: A 永久 ループを使用して、ビジョン センサーが取得した複数のスナップショットを継続的にチェックして、赤い物体がセンサーの視野に入ったかどうかを確認します。