
O que é um sensor de visão?
![]() Caixa de Ferramentas do Professor
-
O Propósito desta Página
Caixa de Ferramentas do Professor
-
O Propósito desta Página
Esta página apresentará aos alunos o que é um Sensor de Visão e algumas de suas capacidades. Os alunos analisarão uma imagem parcial de um projeto de exemplo para ver como o Sensor de Visão pode ser usado com o VEXcode IQ.
As perguntas Motivar Discussão na parte inferior da página podem ser preenchidas como uma discussão em classe ou individualmente nos cadernos de engenharia dos alunos.
Descrição
O Sensor de Visão permite que o seu robô colete dados visuais de uma transmissão ao vivo. Uma transmissão ao vivo é uma transmissão contínua do que uma câmera de vídeo está capturando. O Sensor de Visão é como uma câmara inteligente que pode observar, selecionar, ajustar e armazenar cores e objetos que aparecem no seu campo visual.
 Sensor de
Sensor de Capacidades:
- Este sensor pode ser usado para reconhecer cores e padrões de cores.
- Este sensor pode ser usado para seguir um objeto.
- Este sensor pode ser usado para recolher informações sobre o ambiente.
O Sensor de Visão permite que o robô use dados de entrada visual do seu ambiente. O projeto pode então determinar como os dados de entrada visual devem afetar o comportamento do robô. Por exemplo, o robô pode executar ações (saída), como girar motores ou exibir resultados na tela LCD.
O Sensor de Visão também pode capturar um instantâneo do que está à sua frente e analisá-lo de acordo com o que o utilizador está a perguntar. Por exemplo, um utilizador pode recolher dados do instantâneo, como, por exemplo, de que cor é o objeto? Existe algum objeto detectado? Qual é o tamanho do objeto (largura e altura)?
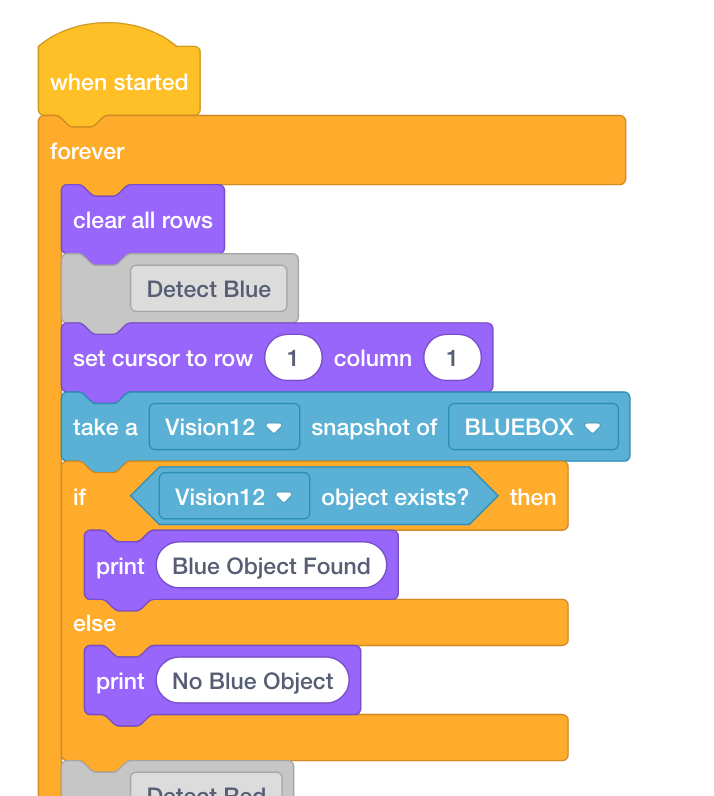
O robô pode então tomar decisões com base nesses dados. O projeto de exemplo parcial abaixo mostra como isso é feito. Nesta primeira parte do projeto de exemplo, o robô imprimirá "Objeto Azul Encontrado" se um objeto azul for detectado e "Nenhum Objeto Azul" caso contrário. Essa é a primeira das três decisões dentro do projeto de exemplo, mas a segunda e a terceira decisões não são mostradas aqui.
![]() Motivar a discussão
Motivar a discussão
P: Que tipos de trabalhos humanos se beneficiariam com a ajuda de um robô com um sensor de visão?
R: Ouça trabalhos humanos que se beneficiariam da capacidade de ver ambientes e/ou manipular ambientes a distâncias remotas (por exemplo, observar animais na natureza, desarmar explosivos ou realizar cirurgias assistidas por robôs).
P: Nomeie um dispositivo e descreva como ele usa entrada, saída e processo.
R: Uma resposta possível poderia ser uma calculadora que pega as sequências de números e operadores matemáticos que uma pessoa insere, processa esses números e operações para calcular um resultado e, em seguida, produz resultados que resultam em uma tela para a pessoa.
P: Por que você acha que um loop para sempre foi usado no projeto mostrado acima?
R: Um loop para sempre foi usado para que o Sensor de Visão verifique continuamente os vários instantâneos tirados para ver se um objeto vermelho aparece no sensor.