
पाठ 1: अनेक अक्षों पर गति करना
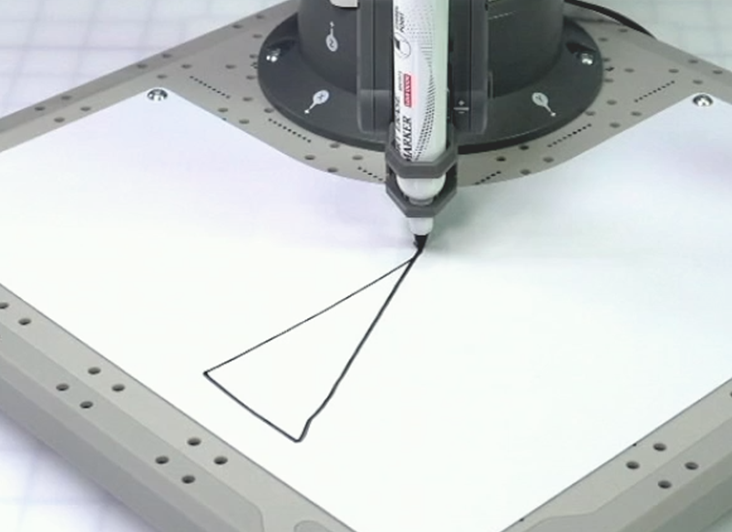
पिछली इकाई में, आपने 6-अक्ष भुजा को x और y-अक्षों के साथ अलग-अलग गति करते हुए एक बाधा के चारों ओर विभिन्न मार्ग-बिंदुओं पर ले जाया था। इस इकाई में, आप एक साथ कई अक्षों पर गति को शामिल करने के लिए उस पर काम करेंगे। पेन का उपयोग करते हुए, आप 6-अक्ष भुजा का पथ देख पाएंगे, क्योंकि यह त्रिभुज की तरह विकर्ण रेखाओं के साथ आकृतियाँ बनाती है।
इस पाठ में आप:
- बहु-अक्षीय गति के बारे में जानें क्योंकि यह 6-अक्षीय भुजा से संबंधित है।
- किसी प्रोजेक्ट को देखें और 6-अक्ष भुजा की गति का पूर्वानुमान लगाएं।
- अपने पूर्वानुमान की तुलना 6-अक्ष भुजा की वास्तविक गति से करें।
एकाधिक अक्षों पर गति करना
जब आपने पिछली इकाई में विभिन्न मार्ग-बिंदुओं पर जाने के लिए 6-अक्ष भुजा को कोडित किया था, तो आप x और y-अक्षों के साथ अलग-अलग चले थे। यह महत्वपूर्ण था ताकि आप वहां मौजूद बाधाओं से बचकर आगे बढ़ सकें। 
हालाँकि, यह ध्यान रखना महत्वपूर्ण है कि यह हमेशा एक बिंदु से दूसरे बिंदु तक जाने का सबसे तेज़ तरीका नहीं होता है। यदि उपरोक्त चित्र में कोई बाधा नहीं होती, तो आप तिरछे चलते हुए सीधे बिंदु 1 से बिंदु 3 तक जा सकते थे।
ऐसा करने के लिए, 6-अक्ष भुजा को एक ही समय में x और y दोनों अक्षों पर गतिमान होना होगा। इस पाठ में आप 6-अक्ष भुजा को एकाधिक अक्षों पर गतिमान करने के लिए डिज़ाइन किए गए प्रोजेक्ट को देखेंगे, जिससे आपको यह समझने में मदद मिलेगी कि 6-अक्ष भुजा 3D अंतरिक्ष में कैसे गति करती है।
इस परियोजना में ब्लॉकों को देखें। इस बारे में सोचें कि आपने 6-अक्ष भुजा की गति के बारे में क्या सीखा है। आपको क्या लगता है कि जब यह परियोजना चलेगी तो 6-एक्सिस आर्म क्या करेगा?
अपनी भविष्यवाणी को अपनी इंजीनियरिंग नोटबुक में दर्ज करें। 6-अक्ष भुजा की गति का शब्दों में वर्णन करें। आप जो सोचते हैं कि 6-अक्ष भुजा पर पेन क्या खींचेगा, उसे खींचिए।
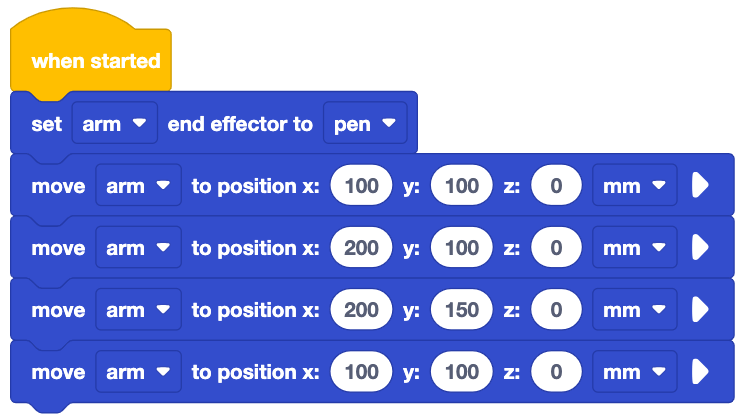
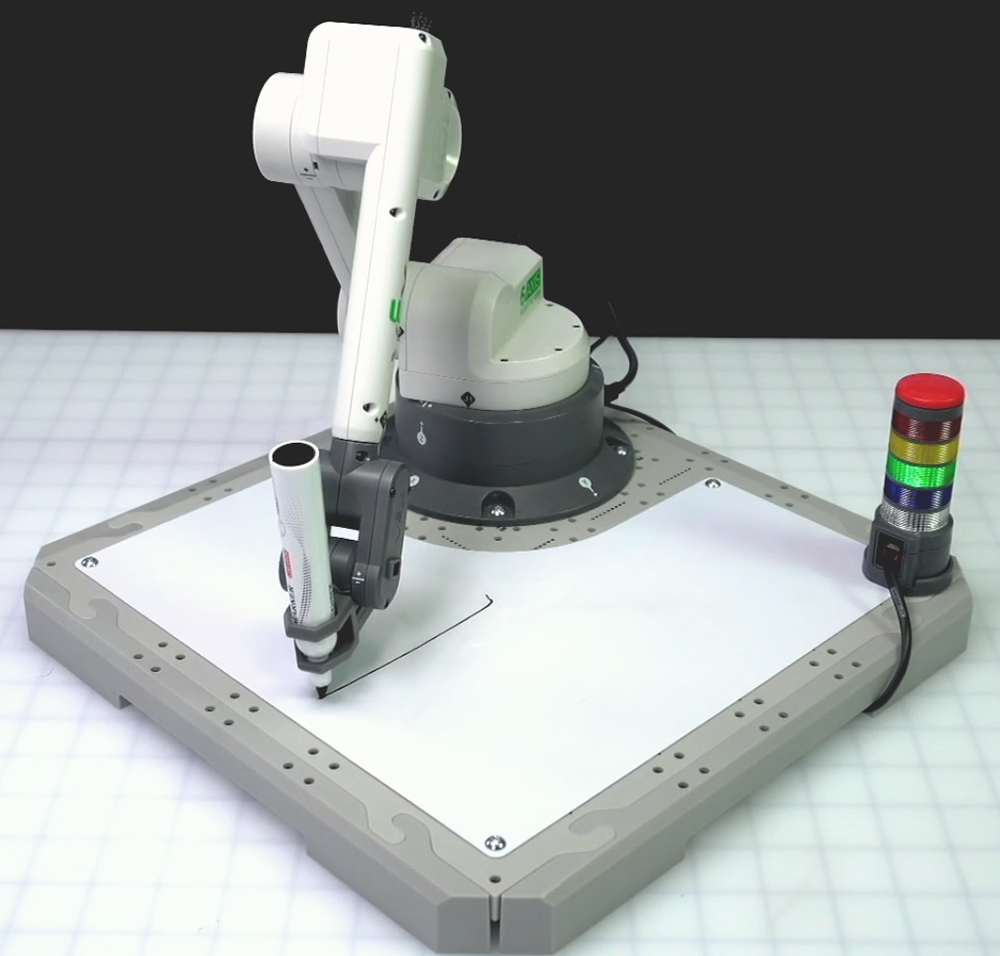
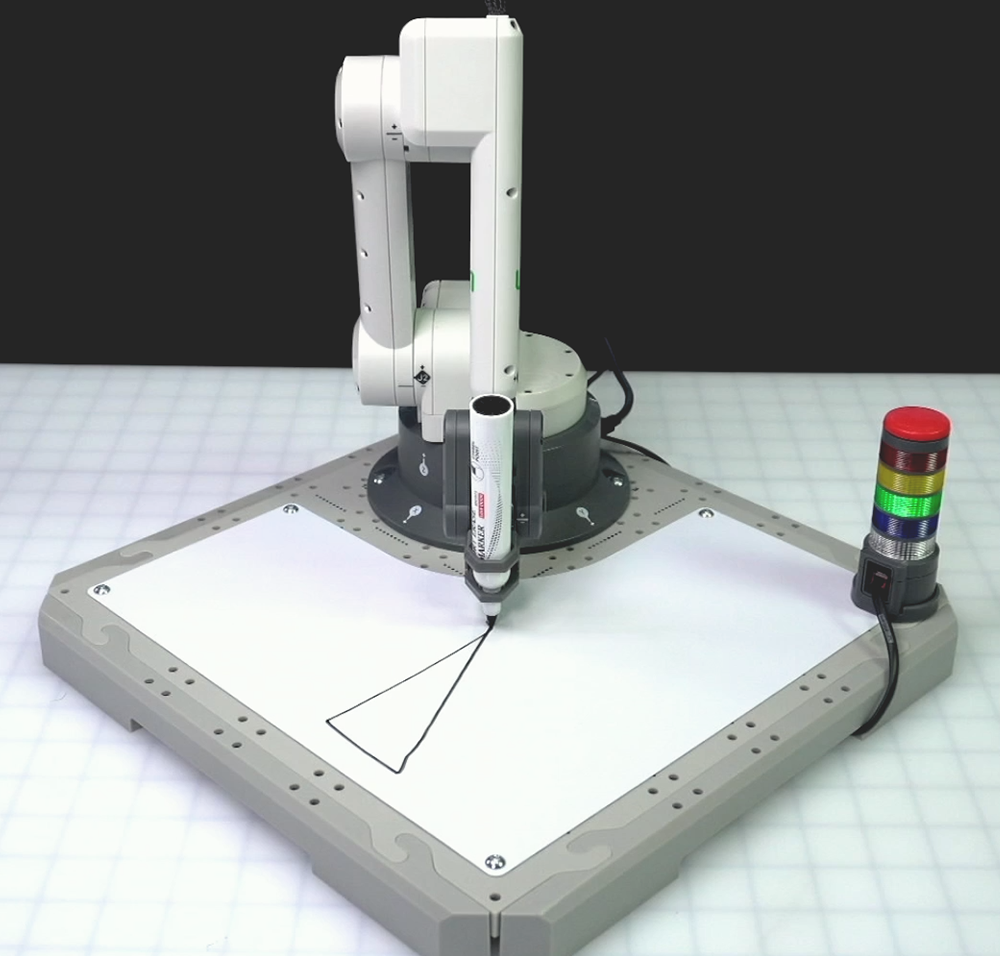
इस परियोजना को क्रियान्वित होते देखने के लिए यह वीडियो देखें। 6-अक्ष भुजा के व्यवहार का निरीक्षण करें। वीडियो में, 6-अक्ष भुजा सुरक्षित स्थिति से निर्देशांक (100, 100, 0) तक जाती है, फिर एक त्रिभुज बनाने के लिए चारों निर्देशांकों में से प्रत्येक पर जाती है।
क्या 6-अक्ष भुजा की वास्तविक गति आपकी भविष्यवाणी से मेल खाती है? क्यों या क्यों नहीं?
क्या पेन आपके इंजीनियरिंग नोटबुक में बनाए गए चित्र के समान या भिन्न चित्र बनाता है? यदि यह अलग है, तो आपको ऐसा क्यों लगता है?
परियोजना में आंदोलनों की पहचान करना
अब आइए आपके द्वारा देखे गए व्यवहारों को इस संबंध में विभाजित करें कि 6-अक्ष भुजा किस प्रकार x और y-अक्षों के साथ गति करती है। पहली दो गतिविधियां वैसी ही हैं जैसे आपने 6-एक्सिस आर्म को बाधाओं के चारों ओर चलाया था, जबकि तीसरी गतिविधि भिन्न है।
त्रिभुज की पहली भुजा खींचने के लिए, 6-अक्ष भुजा x-अक्ष के अनुदिश चलती है।
यदि हम परियोजना में निर्देशांकों को देखें, तो 6-अक्ष भुजा (100, 100, 0) से शुरू होती है और (200, 100, 0) तक जाती है। केवल x-निर्देशांक बदलता है, जो केवल x-अक्ष के अनुदिश गति को दर्शाता है।
त्रिभुज की दूसरी भुजा खींचने के लिए, 6-अक्ष भुजा y-अक्ष के अनुदिश चलती है।
परियोजना में निर्देशांकों को पुनः देखने पर, 6-अक्ष भुजा इस रेखा को (200, 100, 0) से शुरू करती है और (200, 150, 0) तक जाती है। अब केवल y-निर्देशांक बदलता है, जो केवल y-अक्ष के अनुदिश गति को दर्शाता है।

त्रिभुज की तीसरी भुजा खींचने के लिए, 6-अक्ष भुजा एक विकर्ण रेखा में चलती है। यह त्रिभुज के प्रारंभिक निर्देशांक पर वापस लौटने के लिए x और y दोनों अक्षों के साथ आगे बढ़ रहा है।
परियोजना में निर्देशांकों का उपयोग करते हुए, हम देख सकते हैं कि 6-अक्ष भुजा इस अंतिम रेखा से (200, 150, 0) पर शुरू होती है और (100, 100, 0) तक जाती है। निर्देशांक बदल जाते हैं,एक ही समय में दोनों अक्षों पर गति का संकेत देते हैं।
मॉनिटर कंसोल का उपयोग करके, आप देख सकते हैं कि त्रिभुज की दो भुजाओं के लिए x और y-मान एक-एक करके कैसे बदलते हैं, और फिर तीसरी भुजा के लिए दोनों मान एक ही समय में कैसे बदलते हैं। मॉनिटर कंसोल के अंदर वास्तविक समय में x और y मानों में परिवर्तन देखने के लिए यह वीडियो देखें।
अगले पाठ में, आप सीखेंगे कि अपने लिए एक त्रिभुज बनाने के लिए 6-अक्ष भुजा को कोड करने हेतु एक प्रोजेक्ट कैसे बनाया जाए।
अपनी समझ की जाँच करें
अगले पाठ पर जाने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
इस प्रोजेक्ट को स्वयं बनाने का तरीका जानने के लिएअगला >चुनें।